 雷达接收机的噪声洗漱和灵敏度解析
雷达接收机的噪声洗漱和灵敏度解析

接收机是雷达系统中必不可少的的一部分,而接收机性能也关系到雷达的正作。接收机根据其系统架构可以分成:超外差接收机、宽带中频接收机、零中频接收机、数字中频接收机等。接收机在朝着高集成度、低功耗、射频前端的软件化、数字化发展。
雷达接收机的射频前端主要进行的是滤波、放大、频率转换等信号处理,而固有噪声存在于整个接收机前端系统,从而对接收的雷达信号产生影响,降低了输入射频信号的信噪比。而噪声系数(NF)就是对这种影响的度量。所有接收机的灵敏度都受到热噪声的限制,而在雷达中,主要是来自接收机的热噪声(而不是外部噪声源)。
噪声系数
系统的噪声系数决定了最小可检测有用信号或者接收机的灵敏度。噪声系数的线性描述-噪声因子,是一个无单位的量,它是接收机所有的输出噪声(包括输入信号引入的噪声和接收器本身产生的噪声)和仅有输入噪声产生的输出噪声之比。
式中,SNRin是接收机输入信噪比,SNRout是接收机输出信噪比。
级联系统的噪声系数可由如下公式表征。假设在一系列放大器链路中,第一级放大器的增益是G1、噪声系数为F1,第二级放大器的的增益是G2、噪声系数为F2,第三级放大器的增益是G3、噪声系数为F3,以此类推,那么总的噪声系数F如下式所示:
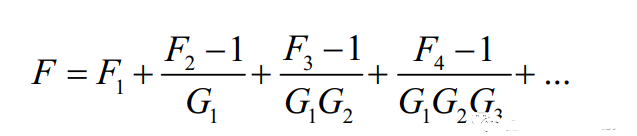
如果G1值很高,那么除了F1之外,其他项的贡献都可以忽略不计,这是一个良好设计系统追求的目标。因此,系统噪声系数很大程度上取决于接收机链路的第一级。
在大多数现代雷达系统中,采用基于砷化镓(GaAs)或氮化镓(GaN)的半导体低噪声放大器(LNA)。这些部件彻底改变了雷达接收机的设计,使雷达接收机噪声系数轻松提高1dB,这比以前的系统好10倍左右。
当然,做任何事情都是需要代价的,避免失真也是至关重要的,因此低噪声放大器具有线性是至关重要的。一个非常高的增益器件(大的G1)往往缺乏线性度,因此,在线性度和噪声系数之间进行权衡是接收机设计的一个重要方面。
在有源电子扫描阵列(AESA)雷达中,通常在阵列的每个发射/接收模块中包含一个低噪声放大器,这减少或消除了在后续接收机的输入端接入低噪声放大器的需求。任何给定的阵列都有许多低噪放,在典型的机载AESA雷达中可能有1000个或更多。
接收机灵敏度
接收机灵敏度是指接收机能够输出规定信噪比(S/N)的信号时,该接收机输入端的最小可检测信号功率Smin;灵敏度表示接收机接受微弱信号的能力,接收机的灵敏度取决于它的输出信噪比(SNR)和内部噪声。
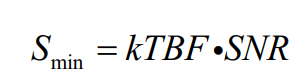
其中k为玻尔兹曼常数,T为绝对温度,室温时取290K,B为噪声通带。灵敏度是一个功率电平,一般用dBm表示,通常是一个比较大的负dBm。
由上式可以看出系统所能接收的信号越微弱,则表示接收机的灵敏度越高。常温下的接收机灵敏度由噪声系数、匹配带宽和所需信噪比决定。
责任编辑人:CC
-
雷达接收机
+关注
关注
0文章
23浏览量
9991 -
接收机
+关注
关注
9文章
1248浏览量
56449 -
雷达
+关注
关注
52文章
3398浏览量
124558
发布评论请先 登录
关于接收机灵敏度
GPS接收机的灵敏度分析
计算ASK接收机的灵敏度
利用外部LNA改善接收机灵敏度
雷达接收机灵敏度自动测试方案设计

各种干扰下接收机如何进行灵敏度测试

GPS接收机的灵敏度分析
介绍接收机灵敏度的定义及性能

GPS接收机的灵敏度性能的原理性分析和设计高灵敏度GPS接收模块



评论