 工控中伺服驱动系统的接线方法
工控中伺服驱动系统的接线方法
随着智能化的发展要求,现在在机器人控制系统中,伺服电机扮演着重要角色,可以说机器人所需要的力、力矩等都有伺服电机提供,以保证其准确、快速的完成动作。
在我们工控中对于要求精度较高的场合需要使用伺服电机,与其说是伺服电机不如说它是一套伺服系统。伺服电机的工作原理在网上基本都可以查到,脉冲控制、精度定位、性能超越等优点。
伺服驱动系统主要由伺服电机、伺服驱动器、控制器组成,伺服电机自带编码器。我们以台达ASDA-B2伺服驱动器和ECMA-C20604RS型号的伺服驱动系统来说明。
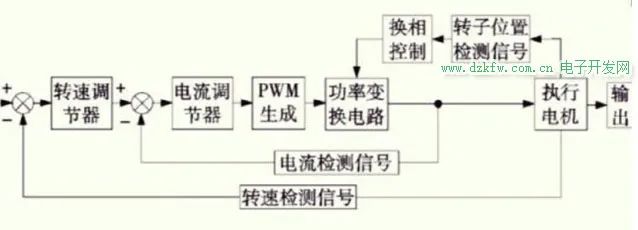
下图是系统接线图:
伺服驱动器
驱动器主要有控制回路电源、主控制回路电源、伺服输出电源、控制器输入CN1、编码器接口CN2、连接器CN3。
伺服驱动器
控制回路电源是单相AC电源,输入电源可单相、三相,但是必须是220v,就是说三相输入时,咱们的三相电源必须经过变压器变压才能接,对于功率较小的驱动器,可单相直接驱动,单相接法必须接R、S端子。
伺服电机输出U、V、W切记千万不能与主电路电源连接,有可能烧毁驱动器。
CN1端口主要用于上位机控制器的连接,提供输入、输出、编码器ABZ三相输出、各种监控信号的模拟量输出。
编码器接线

从上图看出九个端子我们只使用了5个,一个屏蔽线、电源线两根、串行通讯信号(+、-)两根,与我们普通的编码器接线差不多。
通讯端口
驱动器通过CN3端口与电脑PLC、HMI等上位机相连接,采用MODBUS通讯来控制驱动器,可使用RS232、RS485进行通讯。
责任编辑人:CC
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
工控
+关注
关注
6文章
235浏览量
28213 -
伺服驱动
+关注
关注
3文章
85浏览量
17706 -
伺服驱动系统
+关注
关注
0文章
17浏览量
6201
发布评论请先 登录
相关推荐
简单介绍下工控中伺服驱动系统的接线
驱动器主要有控制回路电源、主控制回路电源、伺服输出电源、控制器输入CN1、编码器接口CN2、连接起CN3。控制回路电源是单相AC电源,输入电源可单相、三相,但是必须是220v,就是说三相输入时,咱们

PLC与伺服驱动器的正确接线方法
伺服控制系统的使用方法其实跟变频器类似,它的作用类似于变频器应用于普通的交流马达,也是属于PLC伺服控制系统的一部分,主要应用于高精度的定位
发表于 10-13 14:49
•8555次阅读
伺服电机的使用方法 伺服电机的接线
需要注意的是,在连接伺服电机时需要仔细查看电机和驱动器的说明书,并按照说明书进行正确连接。在连接时需要注意绝缘和接触可靠性,以确保伺服电机能够稳定可靠地工作。同时,还需要注意接线的
发表于 03-03 11:19
•1.1w次阅读





 工商网监
工商网监
评论