 悉尼新南威尔士大学的团队研发了一种柔软的织物机械抓取器
悉尼新南威尔士大学的团队研发了一种柔软的织物机械抓取器
近日,悉尼新南威尔士大学的团队研发了一种柔软的织物机械抓取器,它可以像象鼻一样抓取和释放物体而不会将其损坏。
机械抓取器是一种仿生工具,它的外形酷似一条蛇,设计灵感来自于研究人员对自然界中诸如大象、蟒蛇、章鱼等动物肢体行为的观察。“大象、蟒蛇或章鱼之类的动物会利用其柔软、连续的身体结构来抓紧物体,同时增加接触的稳定性,使它们易于探查、抓握和操控物体。这些动物之所以能够做到这一点,是因为它们有高度敏感的触觉以及成千上万块没有坚硬骨骼的肌肉,例如象鼻就有多达 40,000 块肌肉。”Thanh Nho Do 博士介绍说。
Thanh Nho Do 博士是新南威尔士大学 Scientia 讲师兼医疗机器人实验室主任,也是研发团队的成员之一,他本月在 Advanced Materials Technologies 发表文章介绍了这一新科技。
“我们的新型织物抓取器细小、扁平、轻巧,可以从狭窄的空间抓取各种物体,例如管内的一支笔。” 他说,“该设备带有强化的实时压力传感器,其灵敏度是传统设计的 15 倍,可以检测所需的抓力,以防止损坏所抓取的物体。它还配备一种热激活装置,可以将刚硬的物体变软,也可以使柔软的物体变硬,以便更好地抓握并保持其形状。抓手工具可以抓取比其自身质量重 220 倍的物体。”
在测试过程中,重 8.2 克、长 13 厘米的抓取器可以举起 1.8 公斤的物体,将直径 30 毫米的物体包裹起来。
团队的另一位成员 Nigel Lovell 教授说:“我们使用了涉及计算机服装工程的制造过程,并采用了新设计的、高度灵敏的、基于液态金属的触觉传感器来检测所需的抓力。抓取器将物体从柔性变为刚性的加热和冷却周期还不到半分钟,这是迄今为止最快的速度。”
因为具有灵活的机械结构和强大的承重能力,“蛇型” 抓取器可以克服现有抓手工具的缺陷,完成传统工具不能完成的任务。
“许多软抓手的设计基于爪子或类似人手的结构,带有多个向内弯曲的手指,所以不适合抓握形状复杂、沉重或与抓手开口不匹配的物体。” Thanh Nho Do 介绍说,“许多现有的软抓手也缺乏感官反馈和可调节的刚度功能,这意味着不能使用它们抓取易碎物品或在狭窄环境中使用。”
由于具备高灵敏度、柔软、灵活等特性,这种新科技可以广泛地用于处理易碎物品的行业,例如农业、食品和资源勘探行业,甚至在救援活动中也可以发挥作用。目前,Do 博士已成功测试了该设备并申请了临时专利。他预计,若找到商业合作伙伴,抓取器将在未来的 12-16 个月内投入商用。
“我们现在的目标是优化集成材料,开发闭环控制算法,并将抓取器集成到机械臂的末端,以自动抓握和操纵对象。如果我们能够实现这些后续步骤,则无需手动抬起抓取器,这将有助于处理那些非常重的物体。”他说,“我们还致力于将其与可穿戴式触觉手套设备结合,这将使用户可以远程控制抓爪并感知到抓取的对象。”
责任编辑:lq
-
机械
+关注
关注
8文章
1591浏览量
40639 -
压力传感器
+关注
关注
35文章
2233浏览量
163473
原文标题:“蛇型” 机械抓取器诞生,灵感来自象鼻,可抓取比自身重220倍的物体
文章出处:【微信号:deeptechchina,微信公众号:deeptechchina】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
南京大学:研发水凝胶传感器动态保水新策略

庆熙大学团队研发高效可拉伸OLED
爱普生开发了一种烤箱控制的晶体振荡器,其功耗比传统OCXOs1低56%
Haydale HDPlas™ 技术导电油墨在微量元素分析中的应用前景

利用HDPlas等离子功能化工艺,可增强CGM动态血糖仪微型传感器性能

一种新型的硅基亚波长光栅耦合器设计

机械声学传感概念或支持开发其它无线柔性传感系统
日本九州大学开发了名为QDyeFinder的人工智能(AI)工具
机械自动化是自动化的一种吗
未来的眼睛: 南京大学团队研发出眼动追踪隐形眼镜
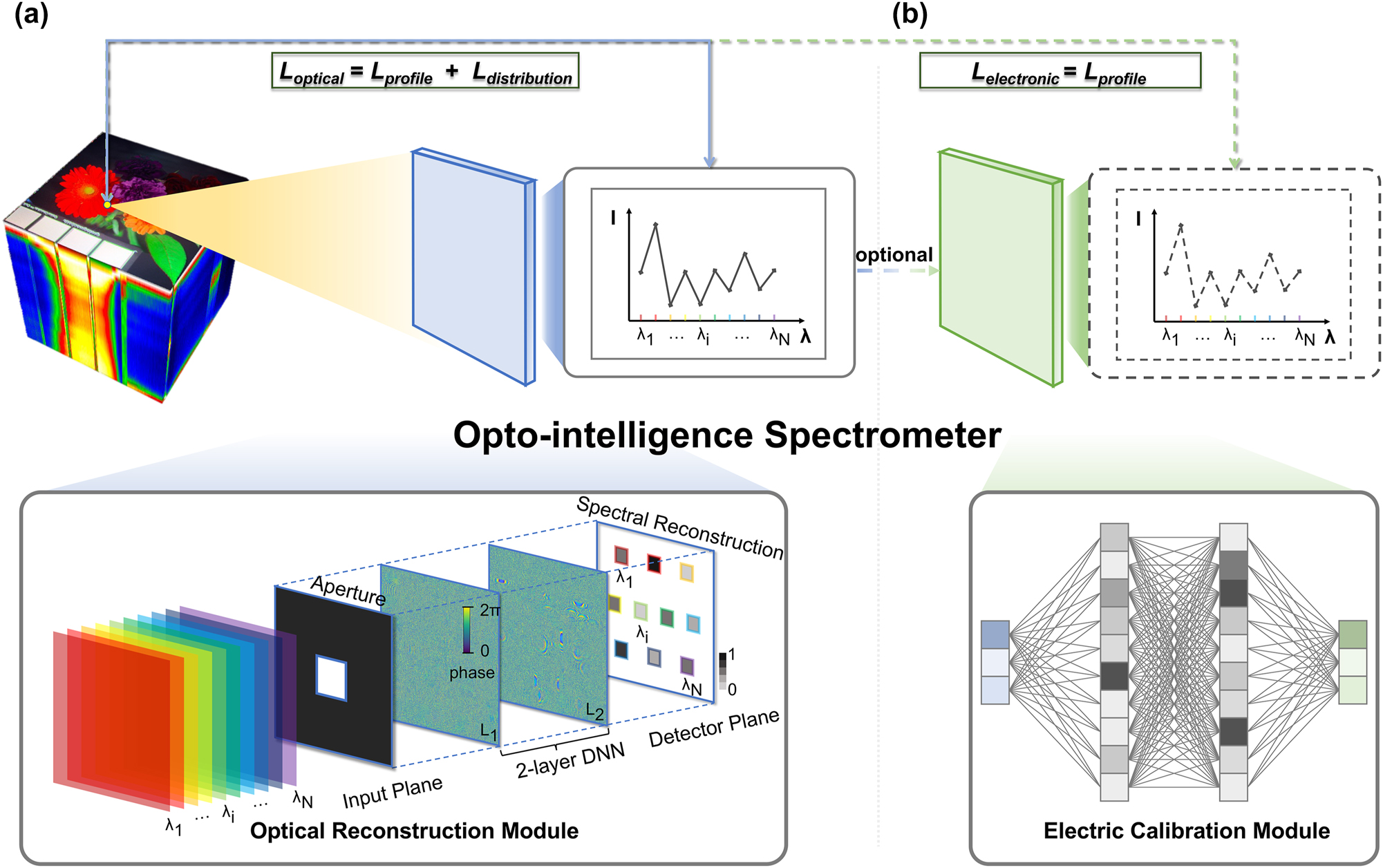
一种基于单像素光电探测器的高光谱视频成像系统设计

马斯克旗下公司完成首例脑机接口设备人体移植,工业自动化领域常见的五种传感器类型梳理

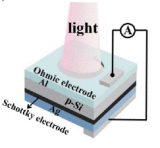
合工大研发出一种基于单p-型硅肖特基结的超灵敏近红外窄带光电探测器





 工商网监
工商网监
评论