 一文带你读懂蜂窝车联网C-V2X
一文带你读懂蜂窝车联网C-V2X

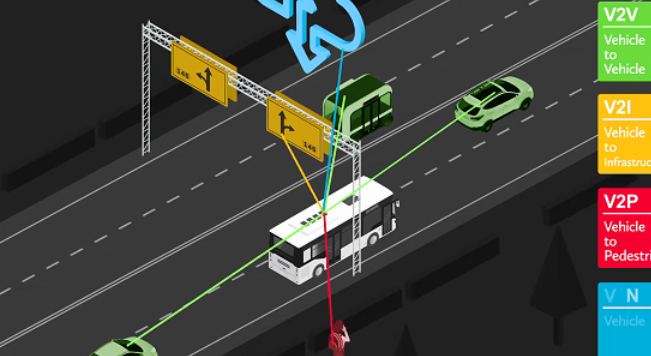
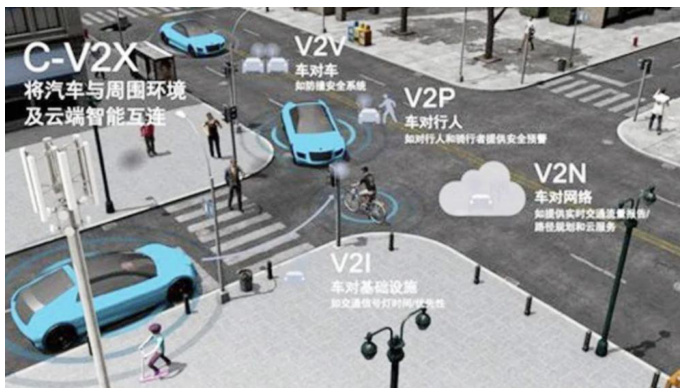
V2X是什么
V2X,即vehicle to everything,车联万物。
简单来说,就是赋予车辆通信能力,通过V2V(车对车)、V2P(车对行人)、V2I(车对基础设施)、V2N(车对网络),让驾乘体验更加舒适,交通环境更加安全,使能未来的自动驾驶。
来源: Rohde & Schwarz
相信很多开车人都有这样的体会:行驶在一条道路,连续好几个路口都遇到红灯,一路走走停停,不仅浪费时间,而且特别耗油。有时候,明明前方一辆车也没有,却还要傻等红灯变绿。你一定会想,如果交通灯也有眼睛和大脑,那该多好啊!
其实,利用V2I(车对基础设施)、V2N(车对网络)技术,就可以掌控全局的交通流量,大幅缩减等待时间,从而实现“绿灯畅行”。
再举一个例子,你平时在开车的时候,有没有遇到过突然窜出的行人或者电瓶车,被他们吓个半死?
这个时候,V2P(车对行人)技术就可以派上用场了。它能够在非视距情况下,捕捉周围环境的信息,让我们拥有“上帝视角”,对潜在威胁进行提前准备。
来源: KEYSIGHT
实际上,我们应该把V2X技术理解为高级驾驶辅助系统(ADAS)的一部分。V2X和其它多种多样的传感器(如摄像头,激光雷达等)相辅相成,共同辅助完成高级别的自动驾驶。
从理论上来说,单车(例如Google的自动驾驶汽车)不计成本地堆砌传感器,也能完成自动驾驶。
但是,缺少了V2X的自动驾驶汽车,就好像是一座信息孤岛。它没办法有效地和周围车辆或者基础设施进行沟通交流,在感知和决策上存在极大的限制。
▉ 两种方案(DSRC vs C-V2X)对比
目前,国际上有两套主流的V2X通信技术规范,它们分别是:
DSRC(专用短距离无线通信):基于IEEE 802.11p,欧洲的ITS-G5同样是基于该物理层技术,我们在这里只讨论DSRC即可
C-V2X(蜂窝车联网):基于3GPP LTE
来源: KEYSIGHT
DSRC已经存在很多年了,因为存在一些先天的不足,发展过程并不顺利。相比之下,3GPP的C-V2X有很多优势,所以这几年发展很快。
我们不妨从各个角度来比较一下这两种技术方案:
首先,从技术角度来看。
5GAA(5G汽车联盟)针对DSRC和C-V2X,在实验室及外场进行了试验对比。结果证实,C-V2X在很多方面的性能,都要优于DSRC。比如,C-V2X支持更远的通信距离、更佳的非视距性能、更强的可靠性、更高的容量和更佳的拥塞控制等。(详细的测试报告请参考文末附件)
来源: 5GAA测试报告P-190033
其次,再从成本和标准化的角度来看。
在这两方面,C-V2X也有一些显著的优势:
C-V2X基于蜂窝网络,与目前的4G和5G网络可以复用,网络覆盖范围广,部署成本较低。相反,基于802.11p的DSRC技术,在组网时需要新建更大量的路侧单元RSU,部署成本很高
C-V2X基于3GPP标准,全球范围内具备更佳的兼容性
C-V2X演进路线非常清晰,且后向兼容(LTE C-V2X NR C-V2X)
来源: Qualcomm
最后,从政策支持的角度来看。
在这方面,C-V2X也有后来居上之势:
美国之前一直支持DSRC,但是最近的态度开始有所转变,偏向C-V2X。美国联邦通信委员会FCC最近针对5.9GHz的重新分配进行了投票,结果,划了20MHz给C-V2X专用
欧洲的态度比较纠结,DSRC和C-V2X两种技术都表示支持
中国拥有全球最大的LTE网络,综合考虑应用价值、成本、性能、专利、政策、产业成熟度等各方面因素,C-V2X无疑是我国V2X技术路线的首选。频谱方面,划定了20MHz给C-V2X专用
▉ C-V2X的3GPP标准化进展
C-V2X未来能否走向成功,仅靠通信行业的支持是不够的。它还需要来自汽车行业代表的有力支持。
2016年9月,5GAA联盟成立,截至目前已有一百多名汽车和通信行业代表参与其中,共同推进全球C-V2X的开发部署。
针对C-V2X,3GPP采取了分阶段迭代的发展策略:
第一阶段,是LTE-V2X (R14)和LTE-eV2X (R15),主要是针对V2X进行安全增强
第二阶段,是NR-V2X (R16及其演进版本), 聚焦自动驾驶场景
来源: KEYSIGHT
R16已经支持车辆编队、高级驾驶、外延传感、远程驾驶等场景。
来源: 3GPP TS 22.186
笔者预计,与LTE-V2X类似,NR-V2X也将经历至少两个版本(甚至更多)的演进和迭代。当前3GPP已经启动了R17技术标准的研究工作,初步规划了R17的主要增强技术,继续对现有版本进行演进。
来源: 3GPP官网
▉ C-V2X的关键技术
首先从架构的角度看。非漫游场景下,5G支持V2X的架构如下图所示:
来源: 3GPP TS 23.287
笔者认为,MEC将会是V2X很重要的一个关注点(并没有在架构图中直接画出)。
根据Intel的研究报告,2020年,一辆自动驾驶汽车每天将使用4000GB的数据。相比之下,一个互联网用户每天使用的数据大约是1.5GB。车辆和道路的数量庞大且复杂,加之传感器数量的增加,由此会带来的大数据处理和存储的难题。
MEC是解决这一难题的有效手段。借助MEC技术,很多服务可以部署到更加靠近车辆和道路等数据源的地方,节省网络资源并降低延迟。
接下来,我们从接口的角度看。
常常有人会问:“在没有网络覆盖的条件下,C-V2X如何工作?”
前面的架构图告诉我们,即使是在没有4G/5G网络覆盖的环境下,C-V2X还是可以利用PC5接口进行彼此通信的。
Uu接口主要是用来实现时延不敏感业务,进行信息共享和提前预测。
PC5接口主要是用来实现低时延的业务,提高非视距条件下的可靠性。
来源: Qualcomm
PC5接口进一步区分为两种工作模式:
模式3:借助基站,通过控制信令接口Uu实现V2V数据的调度和接口管理。在这种情况下,采用动态的方式进行资源的调度,车车间采用PC5接口通信。
模式4:V2V数据调度和接口的管理是基于车车间的分布算法实现。
来源: Rohde & Schwarz
再从协议栈的角度来看。
基于PC5接口的协议栈,如下所示(基于Uu接口的协议栈和传统的5G协议栈一样,这里不再赘述):
来源: Qualcomm
3GPP定义了其中的PHY和MAC层,完全重用DSRC既有的高层协议规范(它们由SAT和IEEE制定)。这就意味着,用户从DSRC迁移到C-V2X的成本会相对较低。
最后,我们来简单了解一下最新的NR-V2X在物理层和协议层方面做了哪些提升(3GPP TR 38.885的第5、6章节有较为详细的描述。备注:协议规范中通常使用Sidelink这个词来描述PC5所承担的具体功能,简称SL),这里仅针对PC5的提升方面进行简要说明:
概念上提出了点对点播、组播的概念,之前PC5只支持广播
物理层处理方面,SL的PSSCH、PSCCH 的资源分配上更规整,便于实现(如下图所示),此外SL支持开环功率控制(OLPC)
同步方面,SL可以使用 S-PSS, S-SSS 完成同步
协议层方面,明确定义SL 通信有三种模式: RRC连接模式(RRC_CONNECTED)、空闲模式(RRC_IDLE)和未激活模式(NR情况下)(RRC_INACTIVE)。在空闲或未激活模式下UE的SL通信是通过SIB 消息里的小区配置信息来完成的。
▉ 结语
目前,全球的C-V2X试验案例正在不断增加。
围绕C-V2X的通信芯片、模组、终端、整车制造、测试验证、运营服务、高精度定位和地图服务等上下游厂商,都在积极进行布局,希望抢占市场先机。
行业普遍认为,基于C-V2X的车联网,很可能成为5G时代最先成功的垂直行业应用场景。
来源: IMT-2020推进组C-V2X白皮书
在我们国家,政府层面非常鼓励包括C-V2X在内的车联网技术的发展。工信部、发改委、交通部、公安部、科技部等部委及地方政府,都针对性给出了一些明确的政策支持。
据不完全统计,目前全国已经拥有超过30个测试示范区,其中包括上海、北京-河北、重庆、无锡(先导区)、杭州-桐乡、浙江、武汉、长春、广州、长沙、西安、成都、泰兴、襄阳等16个国家级示范区。
这些示范区涵盖了无人驾驶和V2X测试场景建设、LTE-V2X/5G车联网应用、智慧交通技术应用等功能,提供了涉及安全、效率、信息服务、新能源汽车应用以及通信能力等的测试内容。
虽然车联网技术正在飞速发展,我们也仍需意识到,车联网最终目标的实现(包括自动驾驶的落地),是一个漫长的过程。除了技术和资金之外,还涉及到法律和伦理的问题。更重要的是,它是否能获得最终用户的信任和认可,被用户接受。
行业曾经指出,自动驾驶将分为若干个过程,逐步实现:
第一个阶段:辅助驾驶安全和提高交通效率
第二个阶段:在封闭园区的(商用车)的自动驾驶
第三个阶段:在开放道路的(乘用车)的自动驾驶
来源: 5GAA白皮书
总而言之, 路漫漫其修远兮,C-V2X将上下而求索。
责任编辑:haq
-
通信
+关注
关注
18文章
6457浏览量
140278 -
车联网
+关注
关注
76文章
2714浏览量
94020
发布评论请先 登录
Qorvo UWB和V2X技术构筑车联网安全防线

Nordic经过全球认证的、多传感器、电池供电的蜂窝物联网原型平台:Thingy91X套件
5G车联网“三网融合”:智慧出行的“神经网络”
推进新型信息基础设施建设发展:蜂窝模组行业迎来结构性机遇
1分钟秒懂v2x车联网技术
兆越通讯车路协同路侧单元解决方案,赋能智慧交通新基建

5.9 GHz C-V2X 和 802.11p DSRC 高功率前端模块 skyworksinc

高通斥资数亿美元收购Autotalks公司,推进车联网部署

基于ESP32C3的智能小车设计

科普|V2X是什么意思?

技术预见者的实践之路:C-V2X发展五年记
车联网V2X通信:贴片电容信号完整性优化与EMC设计
V2X技术全解析



评论