 动态偏振控制器的工作原理、系统设计及应用
动态偏振控制器的工作原理、系统设计及应用
1 引 言
偏振是量子光的一个重要和常用的性质。因此,在量子安全通信系统中,经常通过改变偏振态来进行编解码,而动态偏振控制器(DPC)作为一种改变输入光偏振态的光器件,直接参与传输数据的编解码,在量子通信中起着必不可少的作用。而在传统的光纤通信系统中,如何准确控制光纤中的偏振态成为实验的前提和关键,因为这关系着系统的稳定性和数据传输的误码率,采用DPC也是十分有效的办法。
但是,所有厂家在DPC出厂时并没有给出其重要指标半波电压的具体测量方法,而在实际运用中,半波电压又与给出的标称值不完全一致,导致了使用的不便。因此,在使用DPC时,需要有与之配套的驱动电路和性能监测系统。但是,如果成套购买的话,价格昂贵,在实际的工程开发中,不能达到最佳的性价比,会阻碍量子通信系统的开发和推广。因此,需要我们自主研制和开发DPC的驱动电路和性能监控系统。
本文介绍了DPC的工作原理,给出了其驱动模块和性能监控系统的设计,进行实验结果和理论结果的比较分析,展示了DPC在实际运用中的性能表现以及影响其性能的诸多因素。
2 DPC的工作原理
采用美国General Photonics Co.的PolaRITE.Ⅱ-PCD-002DPC,其由4个光纤挤压器构成,相互以45°倾斜放置。设光纤挤压器X1、X2、X3和X4对应的外部施加的压力为F1、F2、F3和F4,各挤压器对应的驱动电压为V1、V2、V3和V4并由电压信号驱动,产生相应的压力挤压光纤形成线性双折射,从而改变入射光的偏振态。
单模磁场的偏振态都可以用邦加球上的点来表示,如图1所示。
如果增加X1或X3的电压V1或V3,即增加X1或X3的压力F1或F3,则偏振态会绕着OQ轴顺时针旋转;相反,如果减少V1或V3,则偏振态会绕着OQ轴逆时针旋转。另一方面,如果增加X2的电压V2,即增加X2的压力F2,则偏振态会绕着OH轴顺时针旋转;相反,如果降低V2,偏振态则会绕着OH轴逆时针旋转。由此可知,只要输入光的偏振态与Xl和X2的方向都不垂直,那么输入光的偏振态都可以通过操作最少2个挤压器改变到任意一个偏振态。
这种挤压光纤型偏振控制代替了传统的半波片、λ/4波片和半波片的结构,因而具有:1)由于全光纤结构,DPC插入损耗很低,无反射;2)控制速度快,响应时间
轻松换算出来。
3 DPC的驱动模块设计
DPC的驱动电路和性能监控系统是通过如图2所示平台研制和开发的。
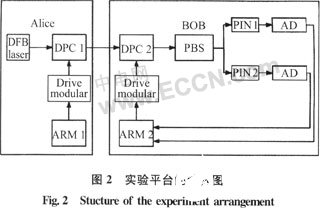
图2所示实验平台,实际上是基于相干光偏振调制的量子安全通信系统,其最大的特点是采用嵌入式系统ARM控制器来实现DPC的同步驱动和监控。平台使用2个DPC,DPC 1用于相干光偏振态的调制和加密,DPC 2则用于解密。以DPC2为例,在进行DPC 2的性能监控时,DPC 1不工作。ARM 2输出数据,驱动DPC 2改变输入光的偏振态。同时,将AD检测输出的光信号强度转化成数据,由ARM 2接收后传输给计算机,由性能监控软件处理。
根据DPC的工作原理,要想将输入光的偏振态改变到任意偏振态,至少需要同时驱动2个光纤挤压器。同时,DPC又自带15倍电压放大模块,而工作在1550 nm波长时半波电压如图2所示,DPC的驱动模块将ARM控制器输出的12位数据(0~4095)通过数模器件转换成0~5 V模拟电压。其电路结构如图3所示。
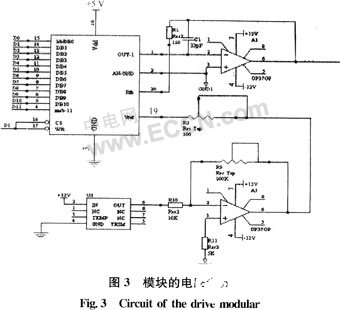
其4路电压驱动设计均相同,都采用高精度的12位DAC(AD7545)的5 V单极性工作模式。AD7545的参考电压由芯片REF02来提供,其电压浮动
4 性能监控系统的设计和结果验证
加在DPC上的工作电压与偏振态问的对应关系是DPC的很重要的性能指标,反映了整个通信系统运作的性能。因此,在对DPC进行性能监控时,需要实时监测反馈的光强信号随工作电压的变化情况。性能监控系统除利用上述实验平台的硬件外,还要在ARM控制器上编写对应的软件,实现对DPC同步的驱动和监控,并将光强变化反馈回计算机,计算机通过特写编写的程序,将变化曲线显示出来。
4.1 软件设计思想
ARM控制器在整个性能监控系统中起着十分重要的作用。一方面,要向DPC发送以一定间隔递增的数据信号(0~4095);另一方面,又要接收AD检测光强后转换出来的数据,并将其传送给计算机,供专门软件描绘半波电压曲线。ARM控制器的软件流程图,如图4所示。
4.2 理论分析
对于图2,如果设定DPC 1的各挤压器电压初始值V1=V2=V3=V4=0,则可以作为测试DPC 2各光纤挤压器半波电压的装置图。以DPC 2的X2为例,给出半波电压的计算方法。已知,如果增加X2的电压V2,则偏振态轨迹绕OH顺时针旋转,旋转1周的电压变化对应2倍的半波电压。入射光的Stokes参量为


由于DPC为无源器件,能量守恒,理想情况下S0不变。又由于偏振态运动轨迹绕轴OH旋转,所以参量S1也不变。S1和S0不变,则表示给定偏振态下的入射光光波在快轴OX和慢轴OY上的投影EOx和E0y不随时间变化。增加V2引起S2和S3变化的本质就是E0x和E0y间的相位差δ1=δy-δx随V2进行周期性变化。
设定入射光相位初始值δx=a,δy=a+δ1,X2电压引起的相位差变化为φ,又因为光纤的快慢轴和PBS的快慢轴一般情况下不重合,为求得普遍情况,可以假设二者问的夹角为θ,则从PBS 2个出口出来的光波模分别为
![]()
因为只观察PBS 1个出口的光强变化可以确定DPC的半波电压,取T1为研究对象,强度为
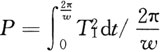
,设E0x的初始相位a=0,E0x=E0y=1,θ=π/4,在DPC1的X2上应用的相位为δ1=0、π/6、π/3和π/2时,绘制PBS 1个出口的光强P随相位差φ的变化曲线如图5所示。
4.3 实验验证
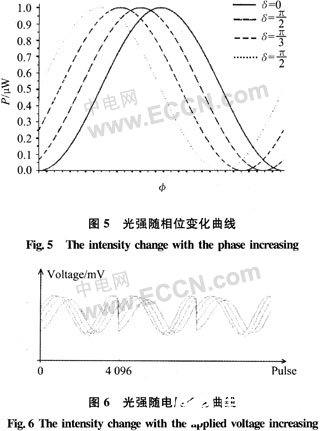
采用图2所示的系统可以测定DPC的各光纤挤压器的半波电压。可以设定DPC 1和DPC 2的X1、X3和X4的电压V1、V3和V4均为0,即可以采用不同的相位δ1,然后让DPC 2的V2在0~5 V变化,可测得DPC 2和X2的半波电压,如图6所示。
4.4 理论和实验结果的比较
1)通过比较图6和图5发现,实验结果与理论分析基本一致,即检测出的光强与施加在DPC上的应用电压服从正弦变化规律。而且,图6中,以脉冲数表示的电压周期T与理论分析的半波电压关系为
![]()
其中:C表示DA转换的精度;因子15表示驱动模块输出电压后DPC自带电压放大器将其放大的倍数。由此,又可以验证实验和理论的一致性。
2)观察图6可以发现,曲线有突变的现象。这是由于驱动模块提供0~5 V电压,而光强变化1个周期对应的电压是0~4 V。所以,光强变化1个多周期、DA输出5 V后,突变输出0 V,光强也随之突变。
3)图6显示,在初始相位差δ1不同时,测量曲线的峰值并不和理论分析完全一致,而且曲线有抖动,不平滑。主要原因是椭圆偏振态不能在光纤中很好的保持。假设2种情况:第1种情况,DPC 1加δ1、DPC 2加φ;第2种情况,DPC1加0、DPC2加δ1+φ。理论上,这2种情况结果应该相同。但是,实际情况有差异,这种差异就是椭圆偏振态不能在光纤中很好保持造成的。
5 结论
研究了针对DPC设计的驱动模块和性能监控系统。驱动模块采用12位高精度DA芯片,设计结构简单,转换精度高,稳定可靠。而性能监控系统则利用了嵌入式系统控制功能强大,并与计算机通信接口简单且速度快的特点,使用ARM控制器同步驱动并且监控,再在Windows下编写应用程序,显示其监控下的光强随工作电压的变化曲线,直观地反映了偏振态随DPC工作电压的变化情况。实验的结果与理论分析的结果基本一致,更表明了方案的可行性。这套性能监测的方法将成为DPC应用时有力的辅助工具。
责任编辑:gt
-
控制器
+关注
关注
112文章
16197浏览量
177392 -
监控系统
+关注
关注
21文章
3860浏览量
173495 -
通信系统
+关注
关注
6文章
1174浏览量
53283
发布评论请先 登录
相关推荐

什么是运动控制器_运动控制器的工作原理及应用
风光互补控制器工作原理 风光互补控制器怎么设置
plc控制器的工作原理 plc控制器的主要功能是什么
伺服控制器的工作原理和基本结构
组合逻辑控制器的组成和工作原理
压力控制器的结构和工作原理是什么
水泵控制器电路图和工作原理





 工商网监
工商网监
评论