 音圈电机怎么控制位置
音圈电机怎么控制位置
音圈电机怎么控制位置
超精密定位系统中的定位运动主要根据微动台偏转角来补偿另一个方向的位置误差,并以最短的时间精确定位到目标位置。而音圈电机(VCM)是一种基于洛伦兹力原理设计的直线电机,其具有结构简单、体积小、加速度高和响应快等特点,广泛应用于超精密定位系统中,在IC制造业中有广泛应用。
音圈电机(VCM)在理论上有长分辨率、无滞后、高响应、高加速度、高速度、体积小且力特性好、控制方便等一系列优点,使它更适用于要求高加速度、高频激励、快速和高精度定位的控制系统中。现代磁盘驱动器、光盘驱动器以及一些高精度的定位系统执行机构都采用音圈电机来驱动。
在定位运动中,音圈电机(VCM)根据偏转角计算位置误差进行定位补偿,其运动方式属于高精度点对点定位运动控制(Point-to-point positioning control),其运动控制目标:音圈电机实现点对点精确定位,只关注响应时间以及目标位置的定位精度,其运动伺服控制系统应具有快速响应、无超调量和鲁棒性强等特点,通常快速响应和无超调量是一对相互制约的指标。
在音圈电机组成的伺服系统中,控制目标是运动机构的位置。由于执行结构和受控对象。惯性的存在简单地将目标值(平台预期位置)减去反馈回来的被控量(平台实际位置)而形成的误差信息作为控制信号驱动执行机构,往往很难使伺服系统的稳定性快速性和准确性达到要求,因此需通过校正来改变伺服性能。所以引人PID校正网络来改变平台的运动性能,利用积分环节对稳定性进行改 变,微分环节对动态性能进行改变,同时减小系统的控制误差。
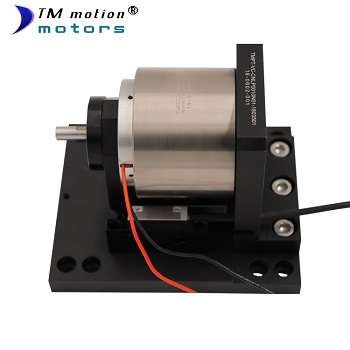
音圈电机模组的结构
它首先是一个音圈电机,其次它又是集音圈电机、光栅读头、光栅尺、导轨内置气路和电子线路等的组合体。直线型执行器。1)直线运动,只需要一轴的控制器控制。 2)位置反馈是闭环的。3)可以内置气路。4)可以安装回复弹簧。5)双线圈。6)轴端。7)接口。
通常情况下音圈电机主要用于高速高精度往返运动,为了实现高精度位置反馈,一般采用光栅编码器,经过多年应用高精密模组我们一般都采用雷尼绍或者海德汉等进口的增量式数字光栅编码器,光栅上每个一定的距离都会有一个刻度,根据这些特性在电机驱动程序里我们可以设置行程范围内任意位置为原点或者初始位置,也就是音圈电机模组通电后不管音圈电机动子处于任何位置,它第一步就是寻找设置的原点,然后在执行其他命令。
责任编辑:YYX
-
定位
+关注
关注
5文章
1293浏览量
35324 -
伺服系统
+关注
关注
14文章
560浏览量
39164 -
音圈电机
+关注
关注
4文章
436浏览量
18109
发布评论请先 登录
相关推荐
FPGA SPWM 音圈电机问题

音圈电机是直流还是交流的
音圈电机是脉冲控制吗
音圈电机的工作原理、控制方法及实际应用
音圈电机的控制方法有哪些
音圈电机是用来干什么的
音圈电机和直线电机的区别在哪里

音圈电机和直线电机的区别






 工商网监
工商网监
评论