 基于混合ARQ技术实现多机牵引无线同步控制系统的设计
基于混合ARQ技术实现多机牵引无线同步控制系统的设计
1 引言
采用基于无线通信技术的列车控制系统,实现有效的运输指挥及安全监控,是国际重载运输技术的发展方向。中国大部分地区特别是山区铁路没有条件建立GSM—R(Global Standard for Mobile Communications—Railway)数据网络。为了提高GSM—R网无法覆盖地区的运输能力,必须研制一种可靠、安全的列车无线同步控制的数据传输系统。混合ARQ技术是无线通信技术的研究热点,兼顾了信息传输的可靠性和有效性,适用于信道恶劣条件下的无线数据传输,能保证机车信号传输的可靠性与安全性。
2 多机牵引无线同步控制系统
图1给出多机牵引无线同步控制系统框图。
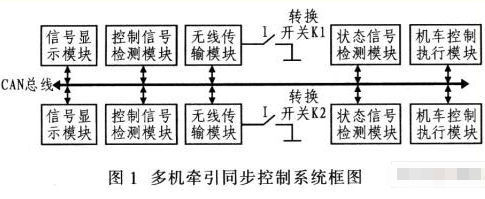
各个模块的具体功能阐述如下。
(1)控制信号检测模块 当整套系统作为本务机车控制系统时,用于检测本务机车控制信号,并把检测到的数据通过CAN(Controller Area Network)总线发送给“主控组”和“备份组”无线传输模块。
(2)状态信号检测模块 不论系统处于本务还是补机控制,该模块均用于检测机车状态信号,并把检测到的数据通过CAN总线发送给“主控组”和“备份组”无线传输及信息显示模块。
(3)无线传输模块采用混合ARQ数据系统。作为本务控制系统时,将数据采集模块的数据向下发送。作为补机控制系统时,接收来自本务机车无线传输模块的数据,CAN总线将检错通过的数据发送给“主控组”和“备份组”机车控制信号执行模块。
(4)机车控制信号执行模块该模块只在系统作为补机控制时工作。通过CAN总线接收来自“主控组”和“备份组”无线传输模块的数据,并比较这两组数据,若结果一致则控制启动相应的继电器、D/A转换器工作;若结果不一致则暂不动作,启动执行模块数据接收异常处理。
(5)信息显示模块 通过CAN总线接收来自无线传输模块、机车控制信号执行模块的数据,并将接收到的数据进行分析和显示。
3 混合ARQ
3.1 混合ARQ系统模型
图2给出系统框图,主要由信道编解码、收发缓冲区和发送应答控制模块组成。发送端先对信源信息检错和纠错编码,存入发送缓冲区,通过信道将全部或部分缓冲信息以数据包形式发送。接收端接到数据包后,先缓存再进行信道译码、检错。若正确,则向发送端发送ACK应答,表明发送成功,开始发送新的数据包;否则发送NAK应答,请求重发。发送端收到重发请求,根据一定策略重发有关信息。如此往复直到解码成功或达到预先设定的最大重传次数。通常,混合ARQ系统传输的信息包包括系统信息(信源原始信息)、纠错信息和校验信息。

3.2 混合ARQ系统分类
由于混合ARQ系统是ARQ和FEC(forward error contro1)的结合,因此,采用不同的ARQ方案(停止_等待,Go-back—N,选择重传等)和不同的FEC(Turbo码,卷积码,线性分组码等)相结合,便可组成不同混合ARQ系统。混合ARQ系统分类非常多,但是,如何有效地将重传策略与前向纠错码的特性相结合才是最值得关心的问题。因此,在研究混合ARQ技术时,通常按照重传策略以及相应的对于前向纠错码字的不同处理方式对其分类。一般来说,混合ARQ可分为:I型混合ARQ;II型混合ARQ;III型混合ARQ;基于可信度的混合ARQ。
4 系统设计
4.1 硬件设计
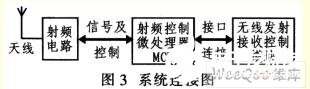
图3为该系统连接图。数据传输系统由数据传输模块和无线发射接收控制模块组成,这两模块通过接口电路连接。数据传输模块采用STR一35工业级低功率无线数据传输模块。STR一35无线数据传输模块信道中心频率为900 MHz,具有高抗干扰能力和低误码率;采用基于GFSK的调制方式,高效前向纠错信道编码技术,提高数据抗突发干扰和随机干扰的能力。该模块能自动过滤掉空中产生的假数据(所收即所发);接口波特率为19 200 b/s。编程灵活,用户无需编写多余程序,只要从接口收发数据即可。
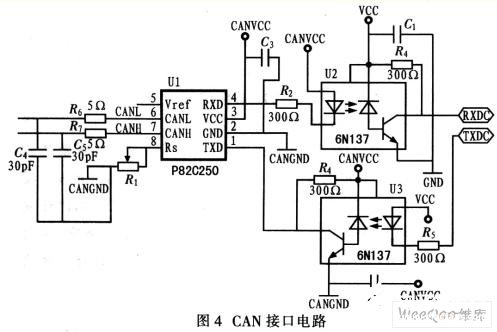
无线发射接收控制模块采用P89C5l作为CPU,CAN总线连接系统内部各个单元模块。P87C59l自带CAN控制器,所以只需设计CAN接口电路,如图4所示。设计中采用CAN总线收发器P82C250。通过不同的连接方式将P82C250的RS接地或接高电平,可使P82C250在高速、待机、斜率控制3种模式下工作。为增强CAN总线节点抗干扰能力,单片机的RXDC和TXDC并不是直接与P82C250的TXD和RXD相连,而是先通过高速光耦6N137后再与P82C250相连,这样很好地实现总线上各CAN节点间的电气隔离,提高节点的稳定性和安全性。
4.2 软件设计
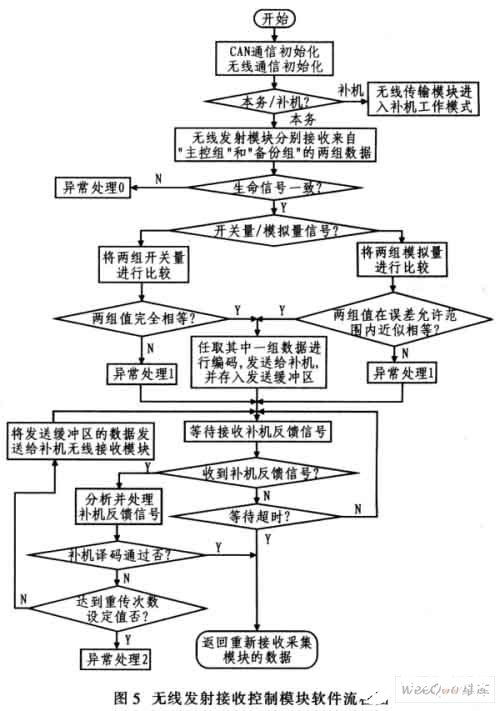
无线传输模块采用半双工工作模式,采用查询式发送,中断式接收。波特率为19 200 b/s。图5为无线发射接收控制模块软件流程图。
4.2.1 选择混合ARQ系统类型
该系统设计的数据传输需满足要求:①高传输可靠性;②低误码率;③满足列车运行系统对信息吞吐量和实时性需求。I型混合ARQ系统、II型混合ARQ系统、III型混合ARQ系统、基于可信度的混合ARQ系统均满足以上3种要求。但在信道变化慢的场合中,III型混合ARQ系统的效率低于II型混合ARQ系统;I型混合ARQ系统复杂度低,可采用各种纠错编码,但效率很低,在信道条件不理想时,很难适应高速数据传输的要求;另外,基于可信度的混合ARQ系统对反馈信道的带宽要求高。因此,综合考虑列车信号无线传输的需求及系统实现的复杂程度,多机牵引无线同步控制系统选择II型混合ARQ作为其数据传输系统。
4.2.2 系统增量冗余方案
研究II型混合ARQ技术主要是寻找合适的增量冗余方案。增量冗余的基本思想是纠错码校验比特只在需要重传时才发送。重传时是重传信息比特还是校验比特取决于具体采用的重传合并方案。主要的重传方案有交叉重传II混合ARQ系统、多编码速率II型混合ARQ系统等。在交叉重传的II型混合ARQ系统方案中,重传过程是信息比特和校验比特的交叉重传。多编码速率II型混合ARQ系统的典型代表是基于码率兼容删除卷积码(Rate一Compatible Punctured Convolutional codes,RCPC codes)和码率兼容删除Turbo码(Rate一Compatible Punctured Turbo Codes,RCPT codes),通过改变删余周期,可以获得各种所需编码速率,速率兼容的删余矩阵,一般都是通过计算机搜索得到。
多机牵引无线同步控制的混合ARQ系统数据传输系统可按需要选择不同的增量冗余方案。RCPC码和RCPT码是应用广泛的速率兼容码,卷积码和Turbo码是较成熟的编解码算法,建议多采用RCPC_ARQ或RCPT_ARQ方案。
4.2.3 重传次数的设定
机车信号的传输要求具有时效性,重传次数的增多必然增加时延,对机车的同步操作带来不良后果。因此,必须对重传次数加以严格控制。一般重载列车的运行速度为40~80km/h,为了满足对运行的列车控制,通常选择控制周期为200~600 ms,在200 ms内所造成的距离误差分别是2.22 m和4.44 m,在控制允许范围之内。重传次数应根据所需传递的信息量设定,并通过多次试验确定。
4.2.4 存在的问题
由于铁路沿线无线传输信道条件十分恶劣,且信号的重传次数有严格限制,可能在达到重传次数的上限时,接收端的信号仍然未能检错通过。其次,混合ARQ系统在发送端和接收端都需要较大的缓冲区,增加硬件成本。其接收端信号的检错、纠错及合并延时较多。因此,要寻找并综合运用其他无线电抗干扰措施,减少误码率,提高检错通过率,在多次重传仍未通过时,要启动异常处理措施。同时需要改进编码技术,简化算法,减少延时。
5 结语
随着无线通讯技术和编码技术的发展,混合ARQ技术将不断改进与创新,混合ARQ数据传输系统的可靠性与安全性得到进一步提高,为多机牵引无线同步控制系统的数据传输提供有力保障,从而实现从机的安全无人驾驶。
责任编辑:gt
-
控制系统
+关注
关注
41文章
6550浏览量
110500 -
CAN总线
+关注
关注
145文章
1938浏览量
130640 -
无线通信
+关注
关注
58文章
4526浏览量
143427
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论