 一文知道旋转编码器程序编写思路
一文知道旋转编码器程序编写思路
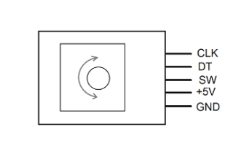
旋转编码器常应用于角度定位或测量时,通常有A、B、Z三相输出。A相和B相输出占空比为50%且相位差为90度的方波。当编码器正向旋转时,A相比B相超前四分之一个周期;当编码器反向旋转时,B相比A相超前四分之一个周期。编码器每转一周,Z相输出一个脉冲。由于编码器每转一周,A相和B相输出固定数目的脉冲,则A相或B相每输出一个脉冲,表示编码器旋转了一个固定的角度。当Z相输出一个脉冲时,表示编码器旋转了一周。因此旋转编码器可以测量角位移及位移方向。
当然,不同型号的旋转编码器,其输出脉冲的相数也不同,有的旋转编码器输出A、B、Z三相脉冲,有的只有A、B相两相,最简单的只有A相。
A和B输出波形为
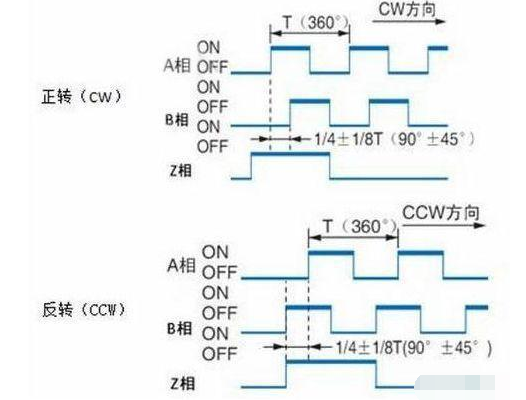
通过输出波形图可知每个运动周期的时序为
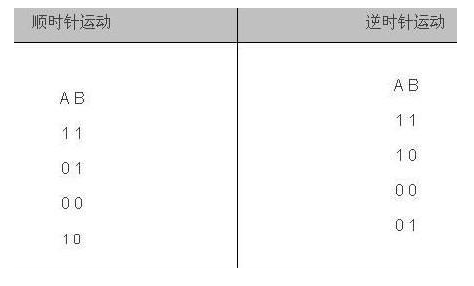
静止状态为11或00
单片机可利用定时器中断来检测A和B的状态,中断时间在5~20ms之间均可。
当检测到A^B= 0时,表示为静止状态,记下A和B的状态。
当检测到A^B= 1时,表示有转动,读取AB的状态,如果AB是从11到01或者是
从00到10则为正转,反之如果AB是从11到10或者是从00到01则为反转。
此方法比较简单可靠,可以检测转动一格又可以检测快速转动。
责任编辑人:CC
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
编码器
+关注
关注
45文章
3704浏览量
135751 -
旋转编码器
+关注
关注
5文章
159浏览量
26068
发布评论请先 登录
相关推荐
旋转编码器参数_旋转编码器与plc连接
本文主要介绍了旋转编码器参数以及与plc的连接方法。在我们选择旋转编码器的时候会有一些专业术语的参数,这些专业术语是什么含义呢?我们来了解
发表于 08-06 11:24
•5656次阅读
旋转编码器是什么,它的优势都有哪些
上应用较多。 旋转编码器有以下的优势 经济,关于多个操控工位,只需一个编码器的本钱,以及更首要的装置、保护、损耗本钱下降,使用寿命增加,其经济化逐步突显出来。 信息化,除了定位,操控室
发表于 12-02 17:34
•4847次阅读

旋转编码器的常见类型
在工业自动化和精密测量领域中,旋转编码器是一种不可或缺的设备。它能够将旋转位置或旋转量转换成模拟或数字信号,为控制系统提供精确的位置和速度信
带Arduino的旋转编码器设计 旋转编码器的工作原理和特点
旋转编码器(Rotary Encoder),也称为轴编码器,是一种将旋转的机械位移量转换为电气信号的传感





 工商网监
工商网监
评论