 KUKA电伺服焊钳,SGL_MoveToPos焊接前移动到焊点位置
KUKA电伺服焊钳,SGL_MoveToPos焊接前移动到焊点位置
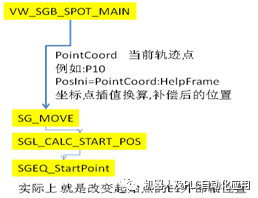
SGL_MoveToPos(SGEQ_StartPoint,SGEQ_StartPoint,#CLS_OPEN,MovementType)
MoveType =MovementType=#SG_PTP 点到点
ContType=#CLS_OPEN
TargetPos =SGEQ_StartPoint
HelpPos= SGEQ_StartPoint
GLOBALDEF SGL_MoveToPos(TargetPos:IN,HelpPos:IN,ContType:IN,MoveType:IN)
该程序用于在焊接前移动到焊接轨迹点使用
DECLE6POS TargetPos, HelpPos
DECL SG_Cont_T ContType
DECL SG_MoveType_T MoveType
CONTINUE
IF((ContType==#SOPEN) OR (ContType==#SCLOSE) OR (ContType==#CLS_OPEN))THEN ContType==#CLS_OPEN
; 关于PTP的第二近似定位=> LIN和LIN至PTP ..
SWITCH MoveTypeMoveType=#SG_PTP 点到点
CASE #SG_PTP 点到点
PTP TargetPos C_DIS 使用轨迹逼近
CASE #SG_LIN直线
LIN TargetPos C_DISC_DIS
CASE #SG_CIRC 圆弧
CIRC HelpPos, TargetPos C_DISC_DIS
ENDSWITCH
ELSE 如果没有上述激活功能ContType=….直接移动没有过渡
SWITCH MoveType
CASE #SG_PTP
PTP TargetPos
CASE #SG_LIN
LIN TargetPos
CASE #SG_CIRC
CIRC HelpPos, TargetPos
ENDSWITCH
ENDIF
CONTINUE
责任编辑:xj
原文标题:KUKA 电伺服焊钳,SGL_MoveToPos焊接前移动到焊点位置
文章出处:【微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
-
机器人
+关注
关注
211文章
28850浏览量
209400 -
伺服
+关注
关注
16文章
656浏览量
41204 -
KUKA
+关注
关注
3文章
217浏览量
16661
原文标题:KUKA 电伺服焊钳,SGL_MoveToPos焊接前移动到焊点位置
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
焊点热量分布监测仪:精准控制焊接温度,提升产品质量
焊点压力实时监测装置的研发与应用
全自动焊点强度检测仪:提升焊接质量与效率的关键设备
焊点能量实时检测仪:确保焊接质量与效率的新利器
电烙铁焊接常见问题解决
焊点压力实时监测系统研究与应用进展
伺服电机位置误差原因和维修
BGA焊接产生不饱满焊点的原因和解决方法

步进电机的伺服控制方法有哪些
激光焊接如何保证焊点质量





 工商网监
工商网监
评论