 科学家提出的新型混合系统,可显著提升多任务处理能力
科学家提出的新型混合系统,可显著提升多任务处理能力
当前,大多数可移动机器人的功能都还处于很初级的阶段,对它们而言,要想足够智能地完成某些工作依然是一个严峻的挑战。如何为机器人设计一种类似“人脑”的大脑结构,来提升其智能化程度,一直是近年来的研究热点。
实际上,“类人机器人”的想法早在 40 年前就已经提出——模仿人脑的运转分工,即使用互补的两个脑结构,大脑(或前脑 cerebrum)负责视觉、听觉和思维等更高层次的认知功能,而小脑(cerebellum)则负责整合感官数据并控制运动、平衡和身体姿势。但是,在这一想法最初提出时,对应的机器人技术还尚未实现。
近日,一篇发表于《科学机器人》(Science Robotics)的论文就详细描述了一种混合系统,该系统将控制运动的模拟电路和控制感知和决策的数字电路结合起来,不仅显著降低了系统能耗,还提升了机器精度和计算效率。
研究人员表示,通过模拟大脑和小脑之间的协作,机器人可以在延迟、功耗更低的情况下,同时执行多个任务。
混合系统的关键——忆阻器
我们知道,机器人要想在动态环境中控制机体,需要具备极强的处理能力,这既需要有一个超大的芯片空间,又需要有足够多的电量来维持续航。同时,机器人在实时控制中,需要快速获取和处理感官信息,从而可以对不断变化的环境条件做出快速反应。
传统上,机器人的控制能力主要是依靠纯数字方法来实现,但这类数字化系统会导致高延迟和高功耗。
而在此次工作中,为使机器人可以适应环境变化,研究人员通过利用忆阻器(即记忆器件和电阻器件的结合体)的可重构性(可编程导电性)来实现机器人运动控制。他们使用忆阻器构建了一个模拟电路,该电路下的一种算法负责集成来自机器人的加速度计和陀螺仪的数据。
忆阻器是一个双端装置,其电阻取决于先前的输入。这种电阻存储器效应是非易失性的,这就意味着即使当电流被移除时,它的电导状态也会保留,从而产生电阻随机存取存储器(RRAM)。
结果显示,这种方法显著减少了计算时间,从而使机器人控制具有更高的精度和速度成为可能。
此外,可编程电阻性还有额外的好处,即允许计算和内存处于相同的物理位置(这种方法也与人脑处理信息的方法类似),控制系统的计算效率因此得以提高。而且,它几乎不会因为器件的变化而受影响,同时还具有较高的耐损性和较长的寿命。
研究人员在实验中只使用两个忆阻器。第一个忆阻器用于模拟滤波器来去除会导致机器人不稳定的传感器信号噪声,然后运动控制器接收滤波后的传感器信号,并使用第二个忆阻器来控制机器人。为了优化第二个忆阻器的导电性,同时使系统能够对未知和不可预测的情况作出即时反应,研究人员在随机搜索算法的基础上,通过一个适应性的学习过程,实现了一种无模型的方法来优化系统参数。
由于滤波器和控制函数的计算是在模拟域中进行的,因此不需要额外的模数转换器或数模转换器,这就大大降低了系统功耗、减少了处理时间和整体电路面积与成本,同时由于量化噪声的降低,精度也得以提高。此外,这些功能背后的计算并不发生在系统的数字域,因此减少了其计算负荷。
混合系统的局限性与展望
研究人员在移动倒立摆机器人上实现了他们的混合信号控制器。这个装置看起来大致像一根平衡放于两个轮子上的杆,从悬浮板到仓储物流,这种简单机器人有着非常广泛的应用场景,波士顿动力公司(Boston Dynamics)最近推出的手臂机器人也基于这种模型进行操作。
与标准的全数字系统相比,这种模拟信号系统的处理速度要快一个数量级,并且能效更高。这不仅使其可以降低原来的电力需求,而且还可以将处理环路耗时从 3000 微秒减少到 6 微秒。这显著提高了机器人的稳定性,原本如果只使用数字平台,机器人完成单个任务需要耗费3秒多时间,现在则只需1秒就能完成并稳定下来。
除了忆阻器外,该混合系统的其余部件均可通过商用电子元件实现。这将使类似的机器人运动控制器可以与更小、更轻的机器人结合在一起使用,使得它们以更高的能效和更快的速度响应不断变化的环境。
不过,研究人员也表示,这仅仅是当前在概念上的证明。他们建造的机器人体积小而且只具有基本形态,在模拟电路上运行的算法也相对简单。但是,可以确定的是,这一概念证明是非常具有前景的,目前已有大量研发投入到神经形态和基于忆阻器的模拟计算硬件之中。
正如研究人员所说:“通过模拟人脑的大脑和小脑的协作,机器人明显可以同时执行多个任务,而且等待时间更短,功耗更低。” 毕竟到目前为止,“人脑”是科学家们发现的最佳计算模型。
审核编辑 黄昊宇
-
机器人
+关注
关注
210文章
28152浏览量
206099 -
任务处理
+关注
关注
0文章
2浏览量
5311
发布评论请先 登录
相关推荐
AI for Science:人工智能驱动科学创新》第4章-AI与生命科学读后感
《AI for Science:人工智能驱动科学创新》第一章人工智能驱动的科学创新学习心得
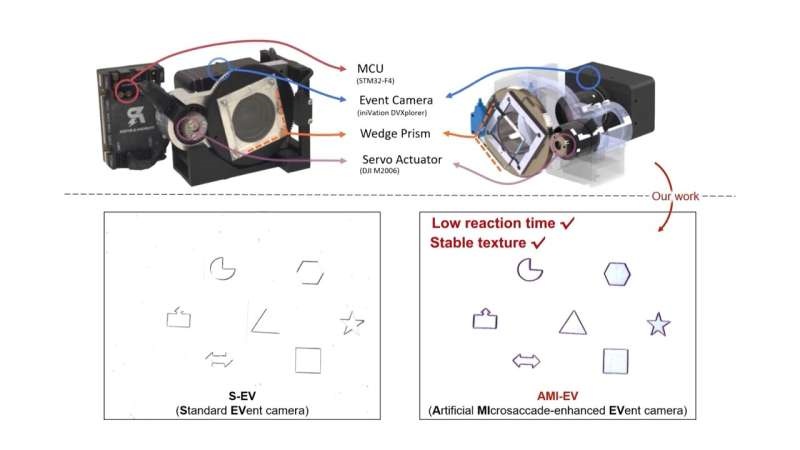
受人眼启发!科学家开发出新型改良相机
中国科学家发现新型高温超导体
新华社:突破性成果!祝贺我国科学家成功研发这一传感器!

前OpenAI首席科学家创办新的AI公司
科学家研制出一款新型柔性X射线探测器
本源量子参与的国家重点研发计划青年科学家项目启动会顺利召开

NVIDIA首席科学家Bill Dally:深度学习硬件趋势

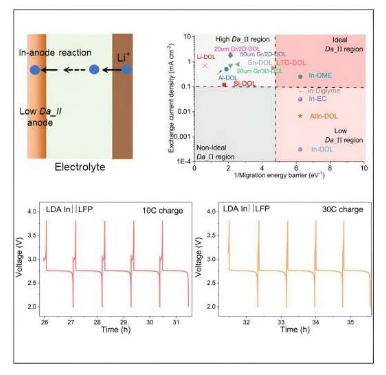
康奈尔大学科学家研制出5分钟快速充电锂电池
谷歌DeepMind科学家欲建AI初创公司
飞腾首席科学家窦强荣获 “国家卓越工程师” 称号

新型全光开关可提高计算机处理器速度





 工商网监
工商网监
评论