 国产特斯拉的雷达传感器
国产特斯拉的雷达传感器
NO.1
特斯拉最近卖得很火,最近参与了国产特斯拉的拆解分析,希望能更深入了解其安全系统配置,我主要关注的是特斯拉安全系统的传感器。拆解发现即使是其低配车型,主动安全系统的传感器除了图像传感器(摄像头)和超声波传感器,还配备了毫米波雷达传感器。
这也进一步印证了《2019-2020年全球与中国汽车毫米波雷达产业研究报告》的数据,报告中2019年全年中国乘用车市场毫米波雷达安装量达517万颗,同比增长44.37%。尤其是77GHz增速达到69.3%,特斯拉的前置远程雷达传感器正是77GHz的毫米波传感器。
种类和应用
NO.2
目前的汽车雷达主要分为超声波雷达、电磁波雷达和激光雷达。
01
超声波泊车雷达
目前汽车基本已普及,前后保险杠的圆形孔位,就是安装的超声波雷达传感器。
但由于超声波散射角大,方向性较差,在空气中传播损耗也大,在测量较远距离的目标时,测量精度比较低;另外超声波传播速度相对较低,因此探测高速移动的物体时延迟较大,误差严重,所以不适合高速移动的物体测距。但对低速短距离测量时,超声波雷达优势明显,所以超声波雷达一般只作为泊车雷达使用。
02
毫米波雷达
毫米波雷达是利用无线电波对移动物体进行探测感知和定位。其探测距离比超声波远,尤其是测量远距离高速移动目标时,反应速度快且精度高,因此毫米波雷达主要应用在盲点检测、碰撞预警和防撞、刹车辅助与紧急刹车、车距和车道保持等方面。
现在有些豪华车已配有5个毫米波雷达传感器:车的前面配备3个,一个长距离77GHz毫米波雷达,前部和后部两侧各布置1个短距离毫米波雷达(通常是24GHz),如图4就是毫米波雷达应用模式,图5是特斯拉的毫米波传感器。
图5 特斯拉毫米波传感器
03
激光雷达
激光雷达(包括影像)易受环境因素影响,还在快速的技术迭代升级,不在此进行讨论。
对比这三种传感器,目前只有汽车毫米波雷达技术能在晴天、雨天、白天和黑夜完成短距离和远程距离的目标探测,因此市场应用即将进入爆发期,但是国产化方面的差距却很大。
毫米波汽车雷达
测距测速原理
NO.3
毫米波是指波长在1-10mm的电磁波,其带宽大,分辨率高,天线部件尺寸小,能适应恶劣天气和环境。
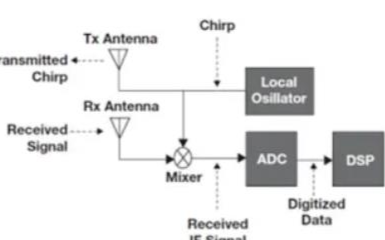
汽车毫米波雷达一般是FMCW(调频连续波)信号雷达,相比军用脉冲信号雷达电路实现要简单一些。
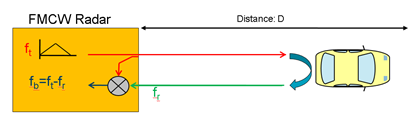
图7FMCW工作原理
下面以三角波调频连续波为例来简单介绍雷达的测距/测速原理。
天线向外发出一系列连续调频毫米波,频率随时间按调制电压的规律变化,发射与接收信号如图8所示。
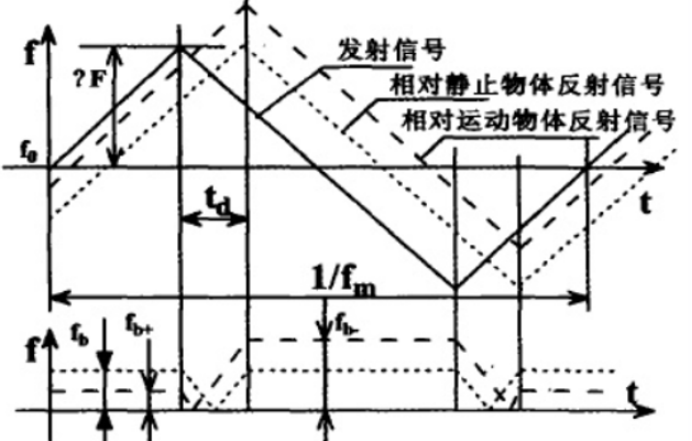
图8 FMCW发射与反射信号
图中实线是发射信号,虚线是相对静止和相对运动物体的反射信号。反射与发射信号波形相同,只是差一个延时时间td=2R/C,式中,R为目标距离,c光速。
发射信号与反射信号在某一时刻的频差即为混频输出的中频频率fb。相对运动物体反射信号由于多普勒效应产生的频移的原因。
在三角波的上升沿与下降沿输出的中频频率分别为fb+、fb-。以下公式就是雷达测试距、测速的理论依据:
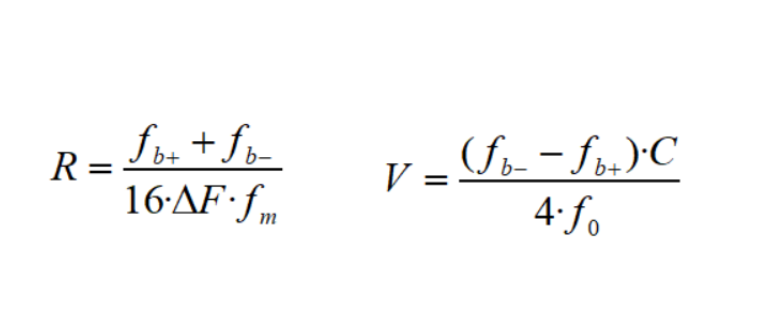
图9 公式
由上面公式可以计算得到目标车辆的距离R与相对运动速度v。中频频率fb的确定是求出R、V的关键。fb的确定即是对发射和反射信号的频差进行频谱分析。
信号的频谱分析主要有FFT法。所谓FFT法,即是对被分析的信号进行傅里叶变换,将其从时域变到频域,在频域进行分析。
这种方法比较成熟、实现容易、实时性强,适合于汽车运行状况下信号的实时处理。
毫米波雷达原理仿真
和实现框图
NO.4
汽车毫米波一般是基于频率调制的连续波(FMCW)。W1905 SystemVue 雷达库可用于汽车雷达系统的原型机的系统仿真和测试验证。
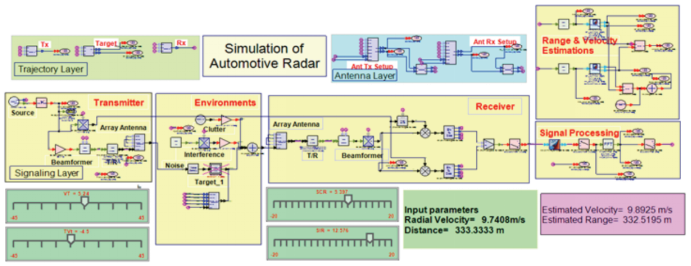
图10 SystemVue 的FMCW雷达系统仿真
系统仿真分为5个子系 统,包括发射机、传播环境、接收机、信号处理器以及距离和速度信息的估计测量。
图11中A就是软件生成的三角形信号波形,B是三角形信号的群时延即频率与时间关系。
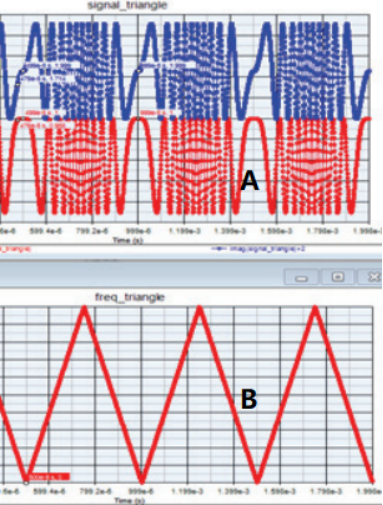
图11 SystemVue 生成的线性 FMCW 三角形信号
图12是SystemVue雷达系统仿真的发射机输出24GHz频谱。
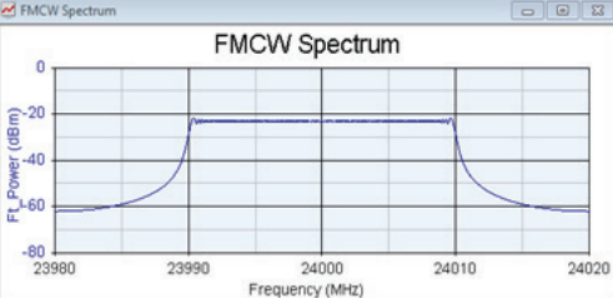
图12 24GHz频谱
现在国际一些知名半导体公司,已推出了车规级毫米波传感器的芯片,目前已商用的毫米波雷达传感器,都是采用这些半导体公司的芯片开发而成的。
这些毫米波汽车雷达芯片是完全开放的,拥有不同资源的厂商可以根据自己条件,跳过原型机的开发和验证,尽快推出自己的产品,抓住毫米波雷达普及应用的爆发期。
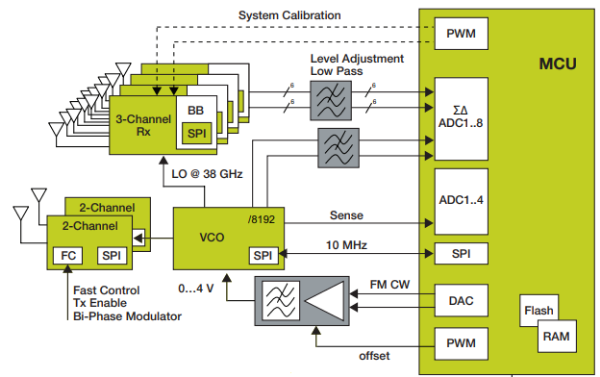
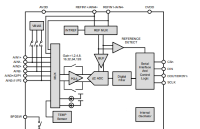
图13 某77GHz汽车毫米波雷达传感器套片原理框图
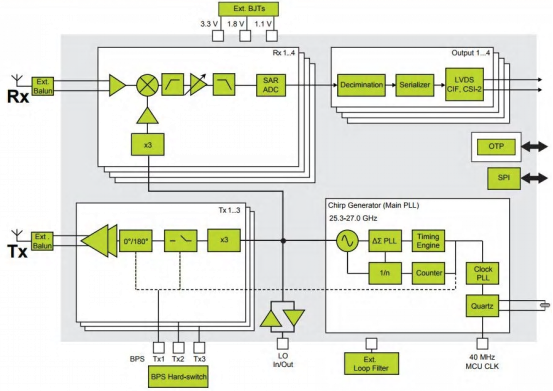
图14 某77GHz毫米波雷达单路收发信机构成框图
77G毫米波汽车雷达
的主要参考指标
NO.5
应用指标包括:
01
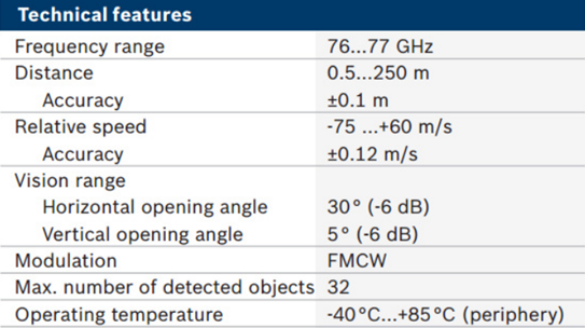
图15参数表
雷达发射机测试主要包含:
①发射信号输出频率及稳定度
②发射信号功率及稳定度
③调制信号质量
雷达接收机测试指标主要包含:
①接收机灵敏度
②接收机动态范围
③抗干扰性能
02
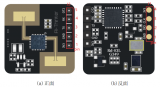
采用某公司收发信机芯片开发的毫米波前端demo
NO.6
01
原型机的性能测试
在研发早期可以采用SystemVue仿真加仪器的验证平台,来诊断和解决跨域问题,减少基带/ 数字信号处理和射频收发信机中的设计裕量。
验证系统框图如下:
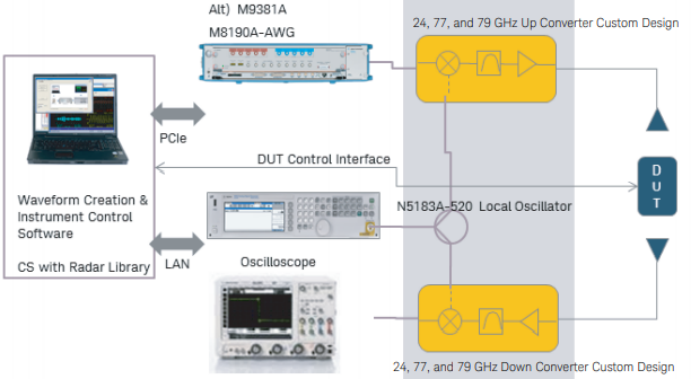
图17 原型机性能验证系统框图
02
产品化开发性能测试
如果是采用毫米波雷达传感器芯片开发产品,现在有商用测试系统,可以根据自己有仪器,搭建自己的测试系统。
①发射机测试
图18
②接收机测试
图19 接收机测试
03
整体性能测试
①方向图和辐射功率测试
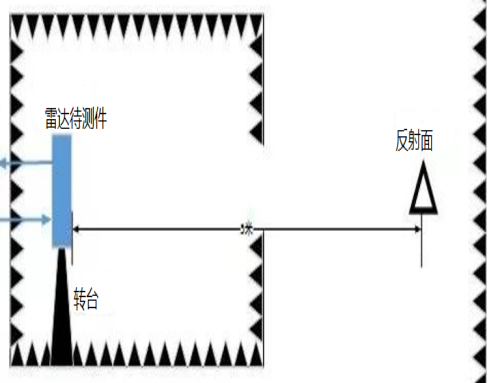
图20方向图和辐射功率测试
②雷达探测及目标跟踪性能测试
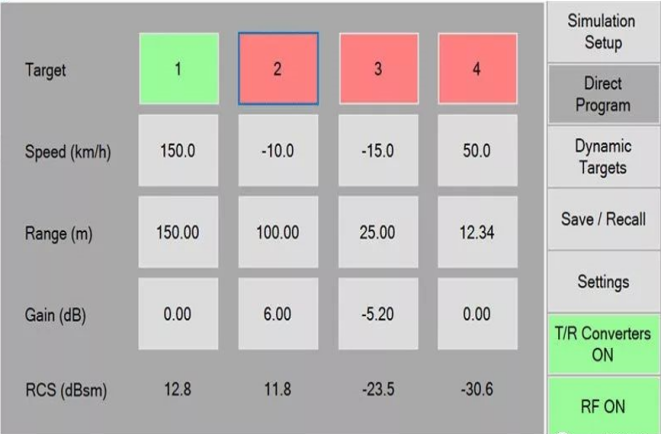
图21雷达探测及目标跟踪性能测试
人们对汽车驾驶安全有着不懈的追求,再加上5G网络的普及和自动驾驶技术日趋提升,汽车将是下一个“移动智能终端”。
毫无疑问,汽车毫米波雷达市场快速增长的趋势已经形成,国内传统的汽车部件供应商将面临严峻挑战!尽快突破毫米波传感器高性能、低成本、大批量生产的关键技术,市场前景无疑是值得期待的。
原文标题:从特斯拉的汽车雷达说起
文章出处:【微信公众号:FPGA设计论坛】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
电动汽车
+关注
关注
156文章
12242浏览量
233064 -
传感器
+关注
关注
2554文章
51700浏览量
758544 -
特斯拉
+关注
关注
66文章
6352浏览量
127200 -
激光雷达
+关注
关注
969文章
4057浏览量
190842
原文标题:从特斯拉的汽车雷达说起
文章出处:【微信号:gh_9d70b445f494,微信公众号:FPGA设计论坛】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
德州仪器低功耗雷达传感器的应用场景
如何在恶劣环境下选择和应用雷达传感器
说说国产传感器的短板与挑战
【CW32模块使用】微波多普勒无线雷达传感器

破解国产传感器的“卡脖子”问题:思路与策略

AJ601PGAP1AA1AMA/E雷达传感器和红外传感器优缺点对比
安泰功率放大器在倒车雷达传感器测试中的应用介绍

国产化替代电流传感器 莱姆电流传感器替代
特斯拉改装座舱雷达,毫米波雷达更香?

雷达传感器增强ADAS安全性,实现驾驶员便利功能
雷达流速流量传感器是一种用于测量水体流速和流量的传感器装备
未来已来,多传感器融合感知是自动驾驶破局的关键
安信可雷达系列的超低功耗人体存在毫米波传感器—Rd-03L





 工商网监
工商网监
评论