 自动驾驶热度越来高,其背后的核心技术也是大家关注的焦点之一
自动驾驶热度越来高,其背后的核心技术也是大家关注的焦点之一
近日,Waymo终于实现了将真正的自动驾驶汽车带到城市街道上的承诺;今年10月,百度也曾宣布将在北京全面开放自动驾驶出租车服务。
(来源于网络)
自动驾驶热度越来高,大家的关注程度也不断升高,其背后的核心技术也是大家关注的焦点之一。
(来源于网络) 精准定位技术是移动机器人、自动驾驶等领域的核心技术。多传感融合是一项综合性的前沿技术,已成为自动驾驶及机器人的主流定位方案。将多个传感器信息进行融合的技术,能够弥补单个传感器的局限,使得定位使得定位更加精准,具备更好的鲁棒性。
目前从事移动机器人、自动驾驶相关的伙伴,在项目中经常会用到多个传感器融合的方案,但是实践项目落地中,如何优化融合方案?有新的传感器融合时,又该如何优化框架并落地实现呢? 多传感器是一个比较庞大的系统,涉及的内容广泛而繁杂,自学难度大,很多大佬在知乎分享干货内容,但大家很难通过零散的知识点达到系统学习的效果,更难了解到落地经验的精髓。那么,怎样高效学习多传感器融合的主要内容,先要从零开始,亲手搭建前端-回环检测-基于滤波-基于图优化的融合定位解决方案,又应该怎么做呢?
责任编辑:xj
原文标题:激光雷达+GPS+IMU+轮速计的传感器融合的定位系统
文章出处:【微信公众号:传感器技术】欢迎添加关注!文章转载请注明出处。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
gps
+关注
关注
22文章
2884浏览量
166045 -
定位系统
+关注
关注
10文章
577浏览量
36451 -
激光雷达
+关注
关注
967文章
3940浏览量
189602 -
IMU
+关注
关注
6文章
298浏览量
45676
原文标题:激光雷达+GPS+IMU+轮速计的传感器融合的定位系统
文章出处:【微信号:WW_CGQJS,微信公众号:传感器技术】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
重塑线控底盘技术:自动驾驶的未来支柱
线控底盘(X-by-wire)技术,作为自动驾驶技术的核心支撑,正悄然改变着汽车工业的技术架构与市场生态。本文深入剖析了线控底盘的定义、在
人工智能的应用领域有自动驾驶吗
的核心技术 自动驾驶汽车的核心依赖于人工智能,尤其是机器学习和深度学习技术。这些技术使得汽车能够通过传感器收集大量数据,并实时进行分析。以下
为什么自动驾驶中全球导航卫星系统如此重要?
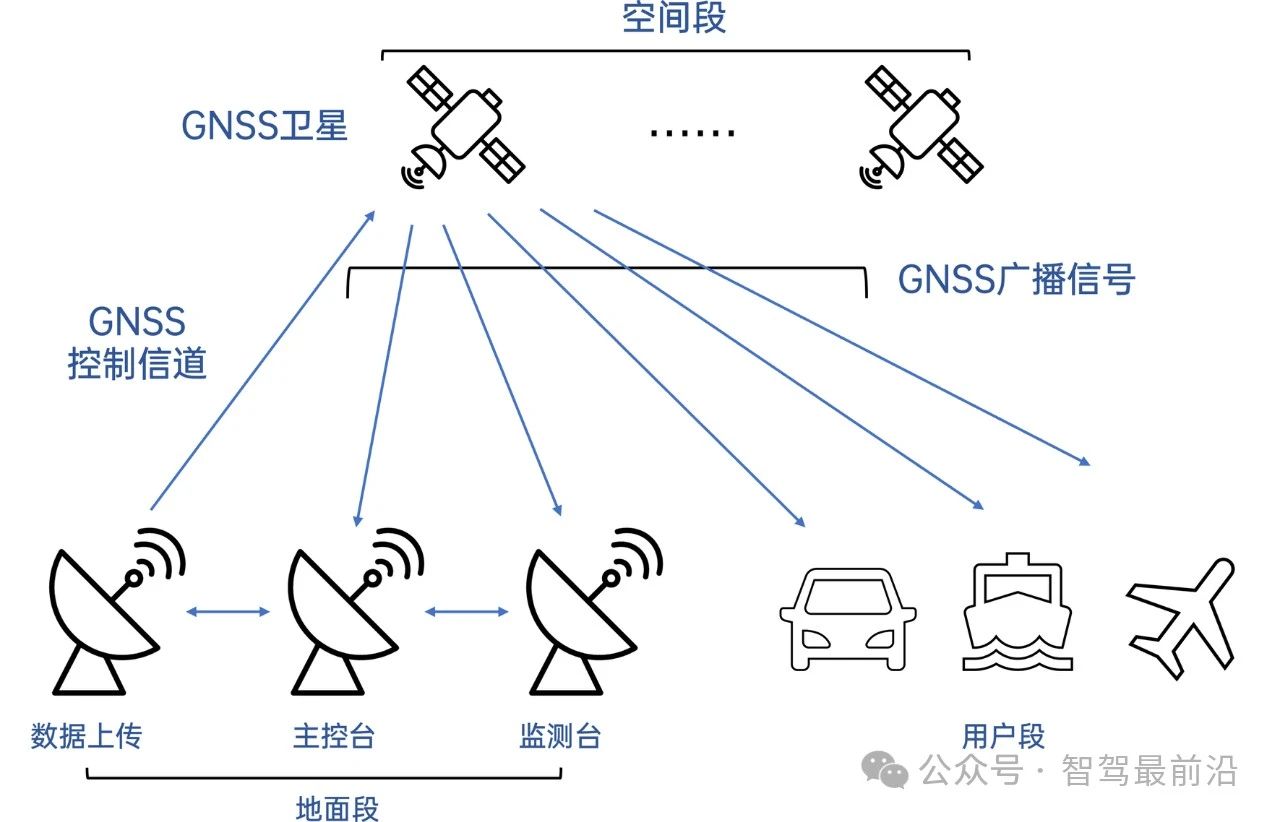
全球导航卫星系统(GNSS,Global Navigation Satellite System)作为实现高精度定位的核心技术之一,已经成为自动驾驶技术发展的重要支撑。随着高级辅助
FPGA在自动驾驶领域有哪些优势?
FPGA(Field-Programmable Gate Array,现场可编程门阵列)在自动驾驶领域具有显著的优势,这些优势使得FPGA成为自动驾驶技术中不可或缺的一部分。以下是FP
发表于 07-29 17:11
FPGA在自动驾驶领域有哪些应用?
和深入。
综上所述,FPGA在自动驾驶领域具有广泛的应用前景和重要的应用价值。其高性能、可配置性、低功耗和低延迟等特点为自动驾驶的实现提供了强有力的支持,并将推动自动驾驶
发表于 07-29 17:09
自动驾驶仿真测试实践:高精地图仿真
引言随着自动驾驶技术的快速发展,基于高精地图的自动驾驶功能已初步落地应用,并持续迭代升级。在研发测试阶段,多方面因素导致测试人员可能无法拿到控制器内部

特斯拉自动驾驶风波再起:加州监管机构指控引关注
特斯拉自动驾驶虚假营销风波再起:加州监管机构指控引关注
近日,特斯拉再次成为公众关注的焦点,不过这次并非因为其在电动汽车
未来已来,多传感器融合感知是自动驾驶破局的关键
/L4级自动驾驶赛跑的元年。
马斯克评论FSD 12.3版本的左转弯操作就像人类司机一样。如果FSD 12.3版本成功,将基本颠覆目前市场上的智能驾驶技术路线。基于“数据/算法/算力”
发表于 04-11 10:26
自动驾驶发展问题及解决方案浅析
汽车的发展提供有益的参考。 自动驾驶汽车发展的现状与挑战 (一)技术难题 自动驾驶汽车的核心在于通过先进的传感器、算法和控制系统实现车辆
华为自动驾驶技术怎么样?
自动驾驶技术是当今世界汽车产业的重要发展方向。作为全球领先的科技企业,华为在自动驾驶技术方面也进行了深入的研发和创新。 一、华为
自动驾驶“十问十答”
? 很多人下意识的认为自动驾驶是为了提升大家日常出行的舒适度和便捷性,实际上,自动驾驶的推动最开始的主要原因之一是为了【安全】,据国外研究表明,其中95%事故与人的因素有关,近70%由






 工商网监
工商网监
评论