 机器人焊接出现的缺陷及应对措施
机器人焊接出现的缺陷及应对措施
传统焊接缺陷的种类很多,按其在焊缝中所处的位置可分为外部缺陷和内部缺陷两大类。外部缺陷也叫外观缺陷。
外部缺陷位于焊缝表面,借用肉眼或低倍放大镜就能观察到。
内部缺陷位于焊缝的内部,必须应用破坏性检验或专门无损检验方法才能发现。
焊接缺陷的常见分类方法如下:
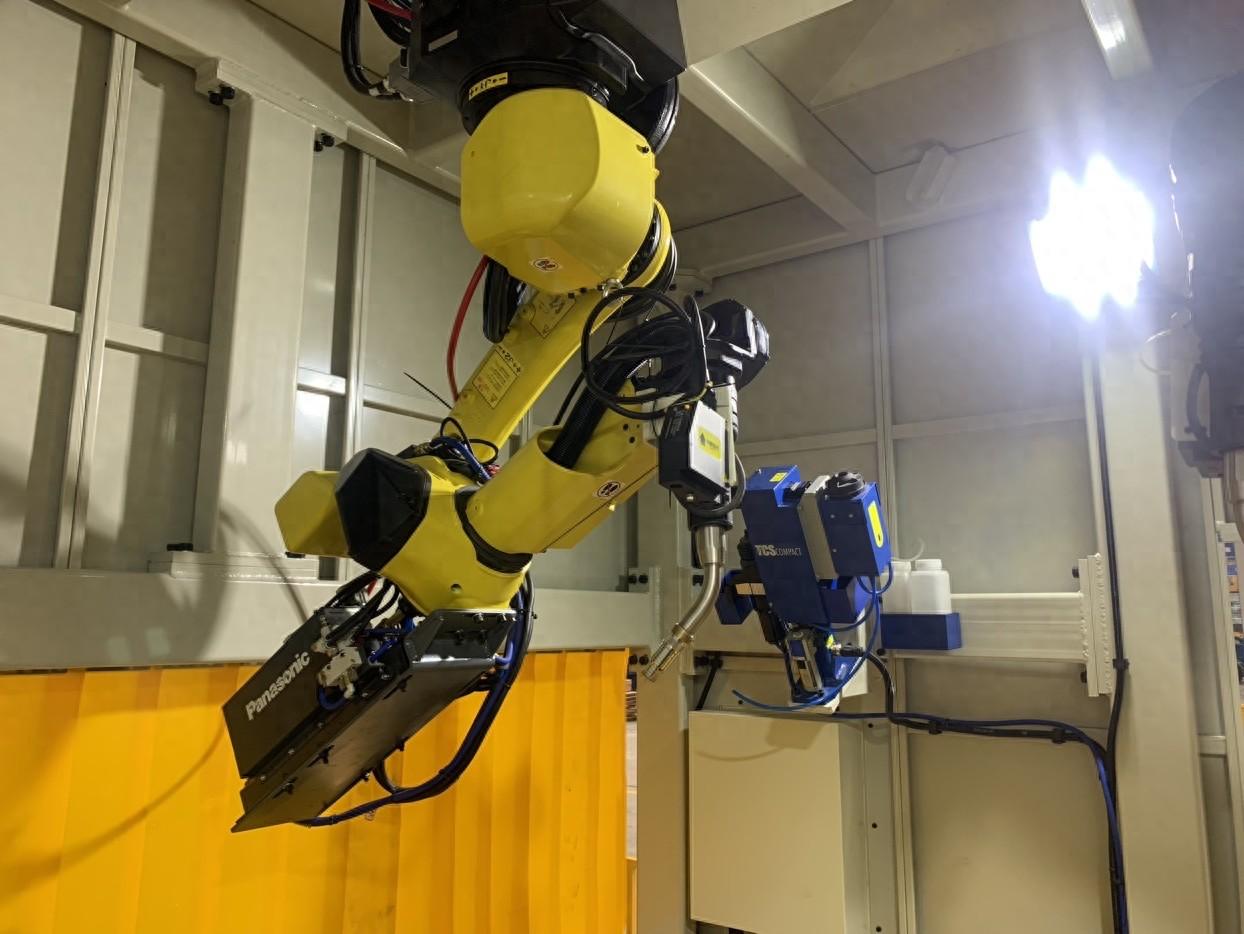
焊接机器人是从事焊接的工业机器人,它主要包括机器人和焊接设备两部分。以弧焊为例,则由焊接电源(包括其控制系统)、送丝机(弧焊)、焊枪等部分组成。弧焊机器人多采用熔化极或非熔化极气体保护焊方法,通常的焊接电源都可以装到机器人上作电弧焊。还应配有传感系统,如激光或摄像传感器及其控制装置等。
根据焊接机器人多年的生产使用,总结了机器人焊接出现最多的缺陷种类,以及对应的措施和办法。
1.焊道焊偏和焊接轨迹无法修正问题
首先在示教模式下,空走程序确保焊接的位置正确。其次考虑焊枪寻找时出现问题。这时,要考虑焊接机器人寻找焊道的方式(电弧还是激光)进行设置,最后,在分析TCP(焊枪中心点位置)是否准确,并加以调整。如果频繁出现这种情况就要检查一下机器人各轴的零位置,重新校零予以修正。
2.出现大量咬边问题
考虑焊接参数选择不当,电流过大,电压过大、焊枪姿态不利于焊接,还有焊接位置是否受限,并适当调整。
3.出现密集气孔问题
可能为气体保护差、工件的焊接表面不够清洁或者保护气不够干燥,进行相应的调整就可以处理。
4.飞溅过多问题
可能为焊接参数选择不当、气体组分原因或焊丝外伸长度太长,可适当调整机器功率的大小来改变焊接参数,调节气体配比仪来调整混合气体比例,调整焊枪与工件的相对位置。
5.焊缝结尾处冷却后形成一弧坑问题
可编程时在工作步中添加埋弧坑功能,可以将其填满。
6、不能引弧
可能是由于焊丝没有接触到工件或工艺参数太小,可手动送丝,调整焊枪与焊缝的距离,或者适当调节工艺参数。
7、焊缝成型较差
可能是由于焊件装配间隙不均匀,焊接摆动幅度过高或过低,电流选择不合适,焊接速度与参数不匹配。
责任编辑:YYX
-
机器人
+关注
关注
210文章
28068浏览量
205765 -
焊接
+关注
关注
38文章
3023浏览量
59506
发布评论请先 登录
相关推荐
焊接机器人拖拽轨迹怎么设置

焊接机器人示教模式怎么设置

深度剖析:MT6816 磁编码 IC 在机器人焊接变位机中的应用


焊接机器人调试技巧有哪些

焊接机器人的应用领域有哪些

视觉机器人焊接的研究现状

焊接专机与焊接机器人哪个好

机器人焊接技术的应用与发展前景
焊接机器人的工作原理与优势分析

焊接机器人的主要优点有哪些
焊接机器人配合变位机的优点






 工商网监
工商网监
评论