 西北大学打造会跳霹雳舞的光驱动水凝胶机器人
西北大学打造会跳霹雳舞的光驱动水凝胶机器人
美国西北大学(Northwestern University)研究人员打造了一台外形仅10美分硬币大小,且看起来像海底动物的机器人。据悉,这个柔软的机器人几乎90%的重量是水 -- 它有一个水凝胶的外观,并且能够通过自身镍骨架改变自己的形状。
据悉,机器人并非借由液压技术或电力移动。相反,研究人员使用化学合成过程来编程分子对光的反应。当机器人暴露在光下时,分子会排斥水。然后它的腿会变硬,从平躺转变为站立的姿势。
机器人可以通过磁场以人类典型的行走速度移动。它可以拾起物体,并通过向内折叠手臂将其固定到位。它可以携带这些物品向前滚动,甚至会跳霹雳舞甩掉黏性较强的物体。
研究人员认为,未来的版本可以在微观层面上发挥作用。他们说,这种机器人在很多情况下都是有用的,比如在某些环境中清除不需要的微粒。它也可设计成使用“以机械运动精准将生物疗法或细胞输送到特定组织”。
原文标题:跳霹雳舞的机器人?西北大学打造光驱动水凝胶机器人
文章出处:【微信公众号:IEEE电气电子工程师学会】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
磁场
+关注
关注
3文章
877浏览量
24210 -
机器人
+关注
关注
211文章
28380浏览量
206918
原文标题:跳霹雳舞的机器人?西北大学打造光驱动水凝胶机器人
文章出处:【微信号:IEEE_China,微信公众号:IEEE电气电子工程师】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
南京大学:研发水凝胶传感器动态保水新策略
近年来,基于水凝胶的柔性传感器在医用器材和智能机器人等领域有着广泛的应用,但其 性能常因水分的快速蒸发而受到影响,导致传感灵敏度和机械耐久度的下降 。尽管各研究团队取得了显著的进展,如引入有机溶剂

DFRobot与西北师范大学教育技术学院签署院企协同育人暨战略合作协议
2024 年12 月9 日,上海智位机器人股份有限公司(DFRobot)与西北师范大学教育技术学院“院企协同育人交流暨战略合作协议签订仪式”在甘肃省兰州市西北师范大学云亭校区举行。西北师范大学
使用NVIDIA Jetson打造机器人导盲犬
Selin Alara Ornek 是一名富有远见的高中生。她使用机器学习和 NVIDIA Jetson边缘 AI 和机器人平台,为视障人士打造了机器人导盲犬。
使用机器学习和NVIDIA Jetson边缘AI和机器人平台打造机器人导盲犬
Selin Alara Ornek 是一名富有远见的高中生。她使用机器学习和 NVIDIA Jetson 边缘 AI 和机器人平台,为视障人士打造了机器人导盲犬。
该项目名为 I
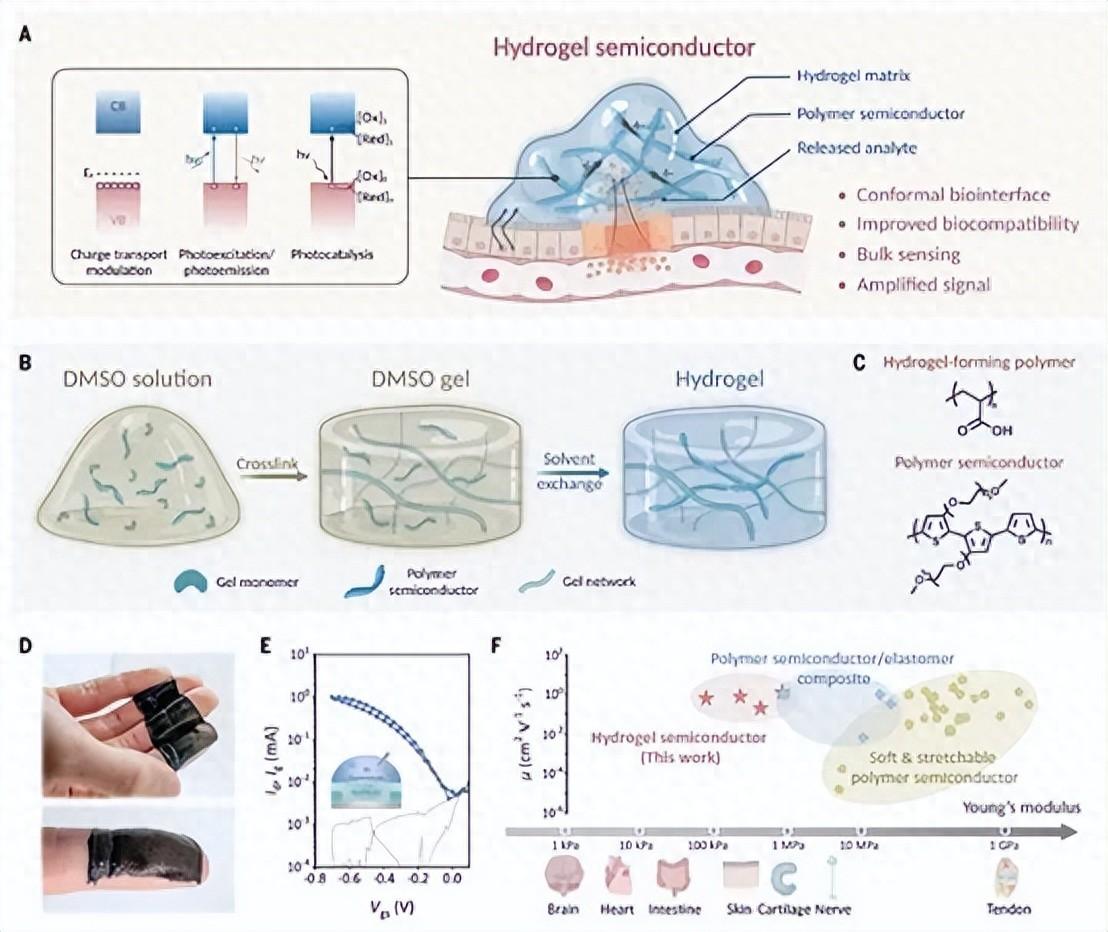
水凝胶半导体材料问世,有望用于生物集成电路
-电子器件界面特性,已经实现了多种检测、诊断和治疗功能。 但和硅基电子器件相比, 水凝胶电子器件因为缺少半导体水凝胶材料 ,尚无法实现丰富的集成电路功能,例如开关、整流、运算、放大等。
Amass连接器助力东北大学TDT战队荣获机甲大师赛季军
8月上旬,在第二十三届全国大学生机器人大赛RoboMaster2024机甲大师超级对抗赛中,经过小组赛、淘汰赛的多轮比拼,东北大学TDT战队获得本届大赛全国季军。在比赛中,东北大学TDT战队在工程

开源项目!用ESP32做一个可爱的无用机器人
简介
作者在完成硕士论文答辩后,利用空闲时间制作了一个他一直想做的机器人——可爱无用机器人。
无用机器人原理是一个连接到开关的电机,通过逻辑门控制。当开关被推到“开”时,机器人启动
发表于 09-03 09:34
余杭区机器人产业大会:创新引领,共筑未来
8月27日上午,余杭区成功举办机器人产业高质量发展大会。会上,由地方政府与浙江大学共同建设的人形机器人产业创新中心成立并揭牌。该中心目标明确,致力于打造

西北大学选购我司HS-DR-5导热系数测试仪
西北大学,这座位于中国西北部的学术重镇,近日购买和晟仪器的HS-DR-5导热系数测试仪,这一举措标志着该校在材料科学领域的研究将迈入一个全新的阶段。西北大学导热系数测试仪,作为和晟仪器的创新

柔性机器人与刚性机器人区别与联系
、伸缩和变形。其结构通常模仿生物体的柔性和弹性特征。 刚性机器人:由刚性材料(如金属、硬质塑料等)制成,具有固定形状和结构,无法轻易变形。 2.运动方式 柔性机器人:通过柔性驱动(如气动、液压、形状记忆合金等)实现复杂的运动方

Al大模型机器人
金航标kinghelm萨科微slkor总经理宋仕强介绍说,萨科微Al大模型机器人有哪些的优势?萨科微AI大模型机器人由清华大学毕业的天才少年N博士和王博士团队开发,与同行相比具有许多优势:语言
发表于 07-05 08:52

武汉大学设立机器人系,雷军基金会捐赠
武汉大学校长江城学院张平文院士强调,过去一年中,武汉大学计算机科学领域取得众多成就,包括研发项目创新性提高、科研经费突破历史记录以及人才引进和培养工作成果显著;由雷军基金会倡议及资助,武汉大学
华数机器人合力打造产业发展生态
海滨及重庆智能机器人研究院相关管理层热情接待。 许宏球副书记听取了杨海滨总经理关于《政产学研用 打造西部机器人创新和产业化新高地》的主题汇报,详细了解华数机器人在核心技术攻关、工业





 工商网监
工商网监
评论