 FreeRTOS的直接任务(消息)通知
FreeRTOS的直接任务(消息)通知
嵌入式专栏
1
写在前面几乎所有RTOS操作系统都提供了队列和信号量的功能,对于大部分新手来说,使用队列和信号量是必备技能。
但是,在大多数情况下,他们都是使用“中介对象”进行通信,而并非“直接任务消息”通信。
通过“中介对象”进行通信,每一组队列或信号量都会分配一段内存(消息缓冲区和流缓冲区)。就存在一个问题,如果队列或信号量比较多,势必造成更大的内存开支。
但是,如果通过本文说的“直接消息”通信,会节约很多内存。
嵌入式专栏
2
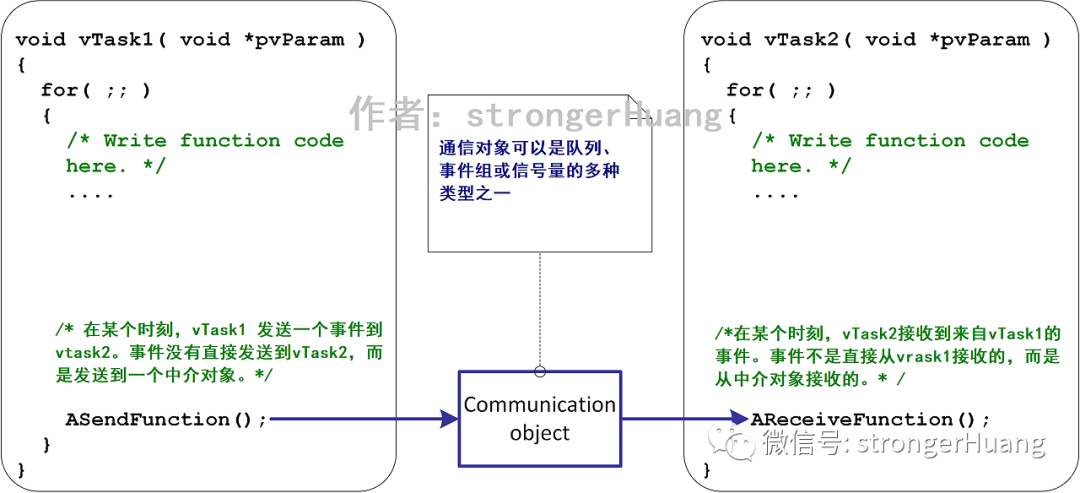
什么是直接任务通知?大多数任务间通信方法都通过中介对象,例如队列,信号量或事件组。发送任务写入通信对象,接收任务从通信对象读取。
比如FreeRTOS的队列通信,首先创建队列之前要定义一个队列:
而这个队列包含了很多中介对象:
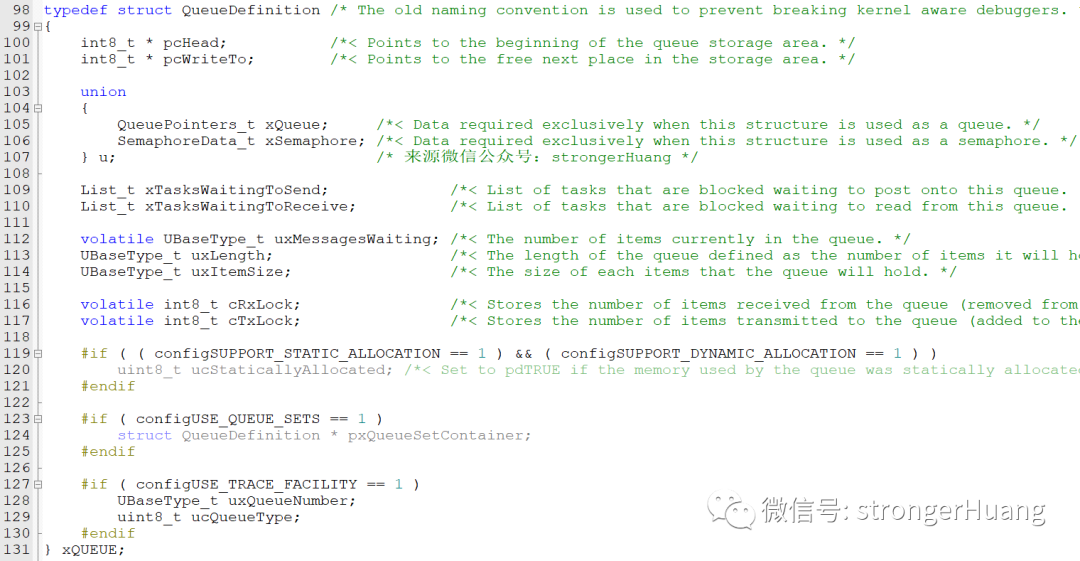
大家可以算一下这个“中介对象”会占用多少RAM空间?
通过一个代码示意图理解中介对象通信:
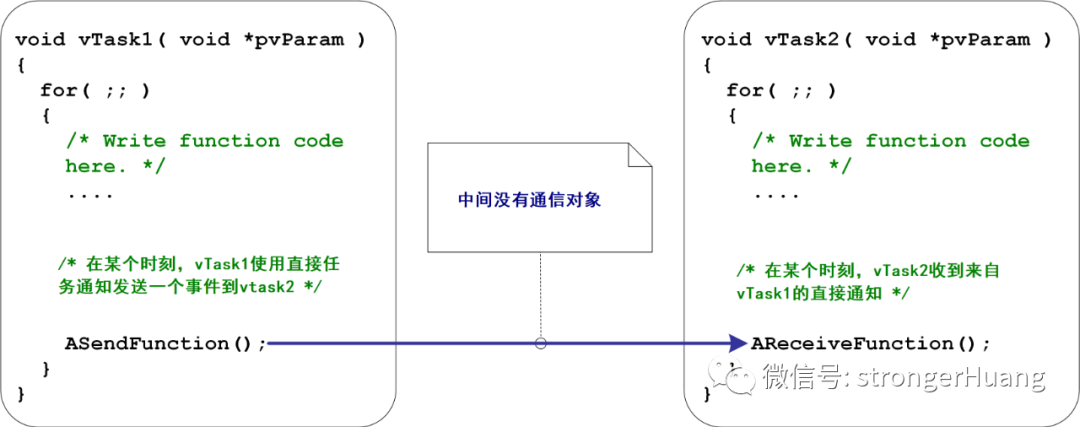
直接任务通知:当使用直接任务通知时,顾名思义,发送任务将通知直接发送给接收任务,而无需中介对象。
通过一个代码示意图理解:
从FreeRTOS V10.4.0开始,每个任务都有一系列通知。每个通知都包含一个32位值和一个布尔状态,它们一起仅消耗5个字节的RAM。
就像任务可以阻止二进制信号量等待该信号量变为“可用”一样,任务可以阻止通知以等待该通知的状态变为“待处理”。同样,就像任务可以阻止计数信号量以等待该信号量的计数变为非零一样,任务可以阻止通知以等待该通知的值变为非零。下面的第一个示例演示了这种情况。
通知不仅可以传达事件,还可以通过多种方式传达数据。
嵌入式专栏
3
进一步分析直接任务通知通过对比FreeRTOS V10.4.0和之前版本,你会发现V10.4.0多了一些API,比如ulTaskNotifyTake / ulTaskNotifyTakeIndexed:
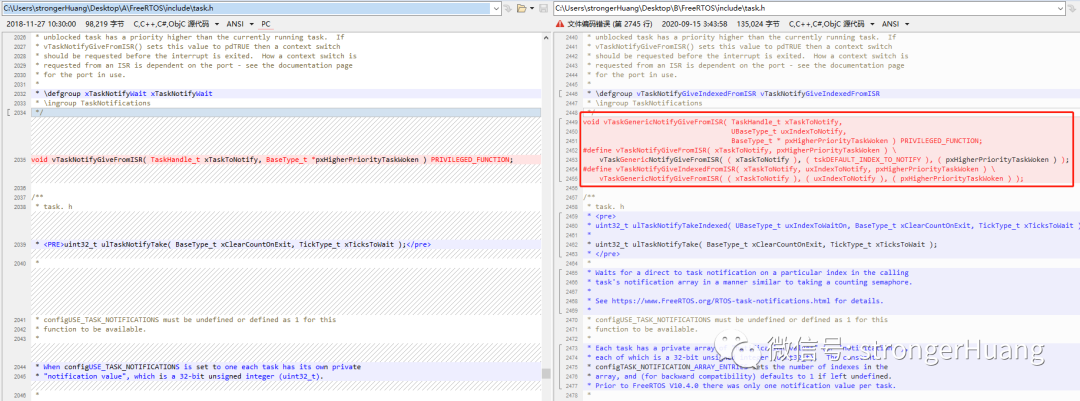
在官网也有针对这些API的详细介绍和说明,以及应用代码例子:
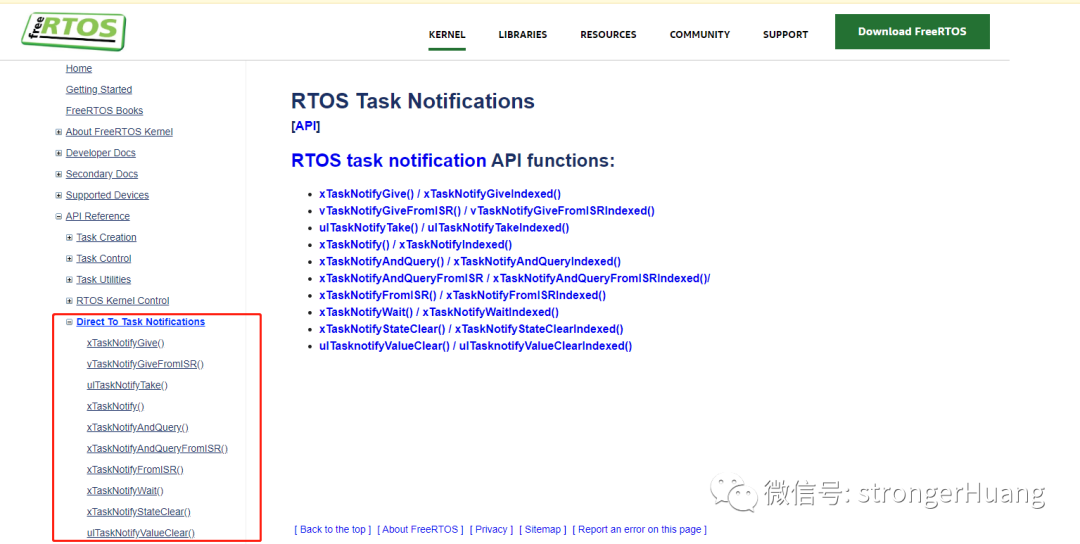
直接任务通信API说明地址:
https://www.freertos.org/RTOS-task-notification-API.html
(公号不支持外链接,请复制链接到浏览器打开)
嵌入式专栏
4
使用直接任务通知性能优势和使用限制任务通知的灵活性使它们可以在需要创建单独的队列、 二进制信号量、 数信号量或事件组的情况下使用。
与使用中介对象(例如信号量)来取消阻止任务相比,使用直接通知取消阻止RTOS任务的速度快了45%(来自官方数据),并且使用的RAM更少。
当然,有这些性能优势,也肯定一些限制:
仅当只有一个任务可以作为事件的接收者时,才可以使用RTOS任务通知。但是,在大多数实际使用情况下都可以满足此条件,例如中断使执行任务处理的任务中断时,该任务将处理该中断接收的数据。
仅在使用RTOS任务通知代替队列的情况下:接收任务可以在“阻塞”状态下等待通知(因此不占用任何CPU时间),而发送任务不能在“阻塞”状态下等待消息。如果发送无法立即完成,则发送完成。
嵌入式专栏
5
使用方法使用方法其实很简单,只要你会使用RTOS的队列、信号量,基本看一眼官方例子就能使用。
我这里也拿官方例子说明一下:
/*main()创建的两个任务的原型*/static void prvTask1( void *pvParameters );static void prvTask2( void *pvParameters );/*处理由main()创建的任务的句柄*/static TaskHandle_t xTask1 = NULL, xTask2 = NULL;/*创建两个任务,来回发送通知,然后启动RTOS调度程序*/void main( void ){xTaskCreate( prvTask1, “Task1”, 200, NULL, tskIDLE_PRIORITY, &xTask1 );xTaskCreate( prvTask2, “Task2”, 200, NULL, tskIDLE_PRIORITY, &xTask2 );vTaskStartScheduler();}/*———————————————————–*//*prvTask1()使用API的“索引”版本*/static void prvTask1( void *pvParameters ){for( ;; ){/* 发送通知到prvTask2() ,使其脱离“已阻止”状态。*/xTaskNotifyGiveIndexed( xTask2, 0 );/*阻止等待prvTask2()通知此任务*/ulTaskNotifyTakeIndexed( 0, pdTRUE, portMAX_DELAY );}}/*———————————————————–*//* prvTask2()使用API的原始版本(不带“索引”) */static void prvTask2( void *pvParameters ){for( ;; ){/*等待prvTask1()通知此任务 */ulTaskNotifyTake( pdTRUE, portMAX_DELAY );/*向prvTask1()发送通知,使它退出“已阻止”状态*/xTaskNotifyGive( xTask1 );}}
责任编辑:xj
原文标题:如何改善FreeRTOS运行的速度、RAM大小
文章出处:【微信公众号:strongerHuang】欢迎添加关注!文章转载请注明出处。
-
RAM
+关注
关注
8文章
1380浏览量
115457 -
FreeRTOS
+关注
关注
12文章
484浏览量
62758 -
运行速度
+关注
关注
0文章
2浏览量
6749
原文标题:如何改善FreeRTOS运行的速度、RAM大小
文章出处:【微信号:strongerHuang,微信公众号:strongerHuang】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
使用任务通知提高RTOS应用的效率
freertos最多支持多少个任务
freertos和rtos区别是什么
关于BLE通知值的通知长度问题求解
请问一下FREERTOS只能创建4个任务,修改哪个宏定义可以增加创建任务的数量?
浅析FreeRTOS任务调度器的三种调度算法和应用






 工商网监
工商网监
评论