 关于任意多相机系统的SLAM重设计
关于任意多相机系统的SLAM重设计
在SLAM系统中增加更多的相机可以提高鲁棒性和准确性,但会使视觉前端的设计变得非常复杂。因此,文献中的大多数系统是为特定的相机配置定制的。在这项工作中,我们的目标是一个适用于任意多相机设置的自适应SLAM系统。为此,我们重温了可视化SLAM中的几个常见构建块。特别是,我们提出了一个自适应初始化方案,一个传感器无关的信息论的关键帧选择算法,和一个可扩展的基于体素的地图。这些技术对实际的相机设置做了很少的假设,并且更喜欢基于理论的方法而不是启发式方法。通过这些修改,我们采用了最先进的视觉里程计,实验结果表明,修改后的流水线可以适应各种各样的摄像机设置(例如,一个实验中有2到6个摄像机),而不需要传感器特定的修改或调整。
贡献
自适应初始化方案。
与传感器无关的信息论关键帧选择算法。
可扩展的基于体素的地图管理方法。
多相机系统在感知算法方面实现了卓越的性能,并被广泛应用于现实世界的应用中,如全向测绘、自主无人机和虚拟现实耳机。为了便于在SLAM中使用这种系统,我们提出了几个通用设计来自动适应任意多相机系统。
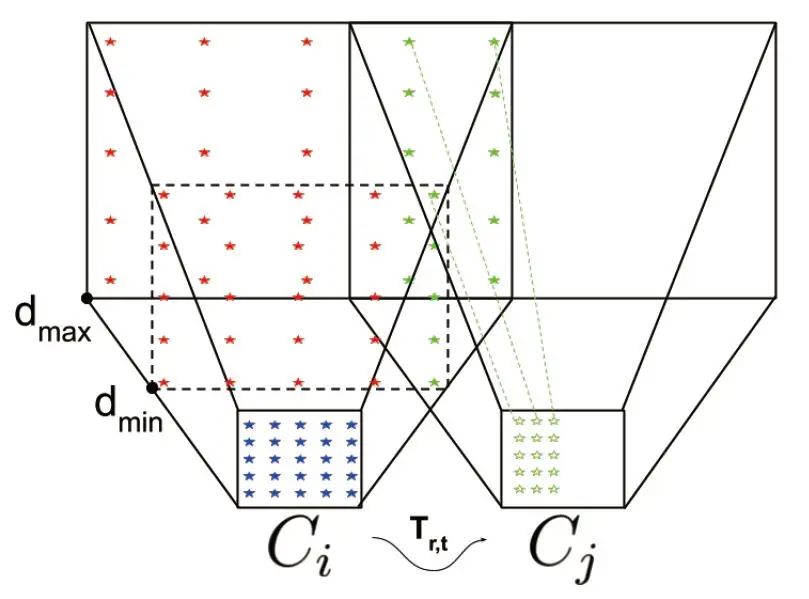
图2 两个摄像机之间立体重叠检查的图示,Ci和Cj。蓝星是相机I像面上的采样点,绿星是成功投影到相机j的3D点,红星是从像面上掉下来的点。
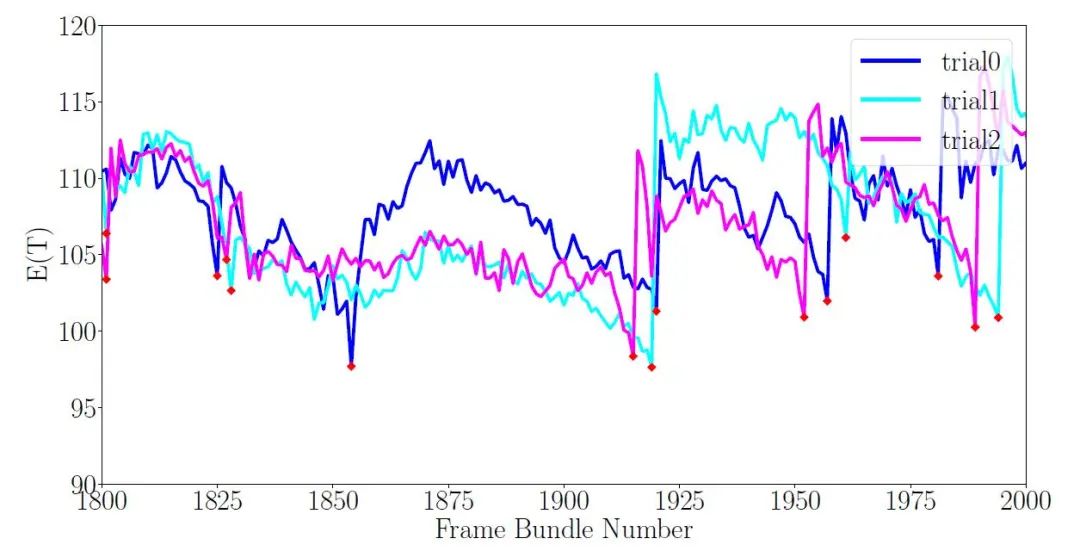
图3 EuRoC MH 01中3次运行的负熵演化。每次运行的E(T)以不同的颜色显示,红点表示某帧被选为关键帧的位置。插入关键帧后,E(T)增加,随着传感器远离地图,e(T)减少。
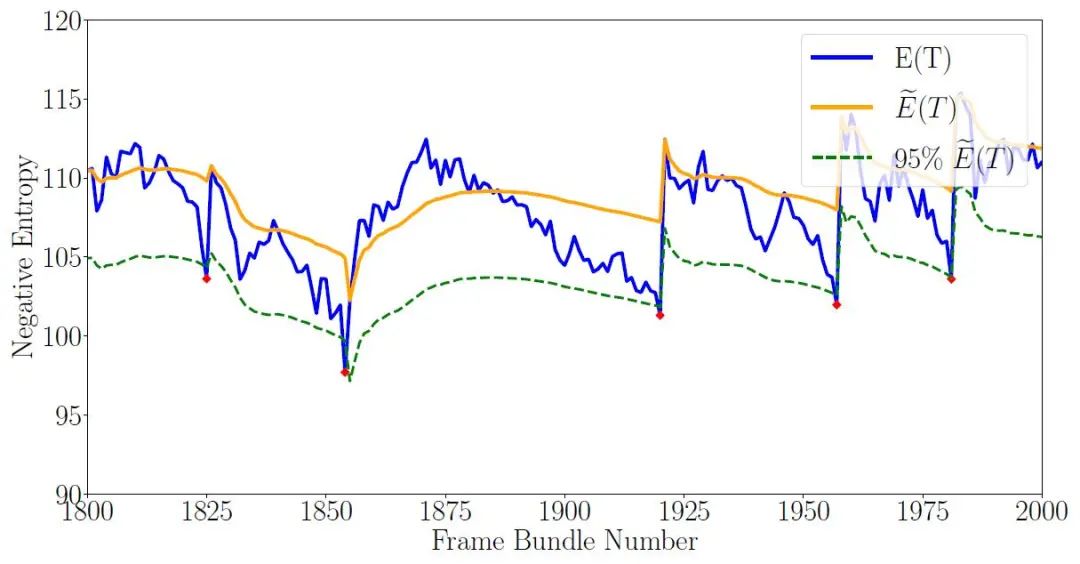
图4 运行平均E(T)和关键帧选择。运行平均过滤器(黄色)跟踪自最后一个关键帧以来的定位质量。当当前帧的负熵(蓝色)低于运行平均值的某个百分比(绿色虚线)时,将选择一个新的关键帧(红点),并重置运行平均值过滤器。
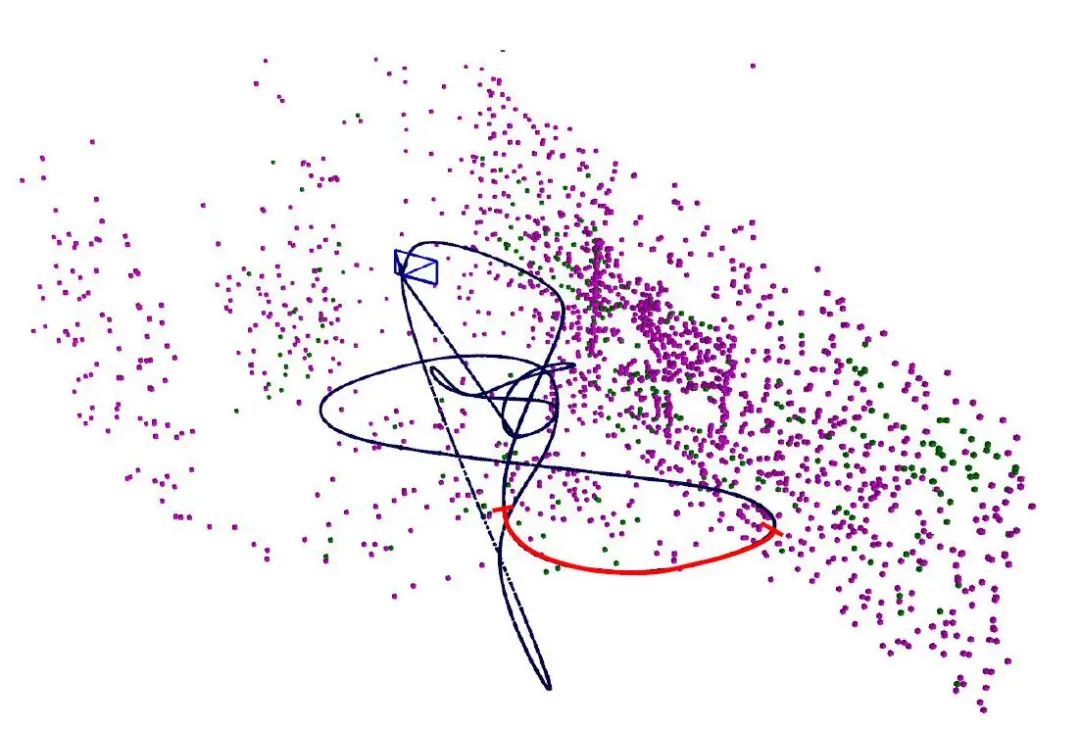
图5 模拟环境中的模拟图8轨迹。该轨迹是通过用5个摄像机运行调整后的VIO管道来估计的。单目设置丢失轨迹的部分用红色标记。品红色点是SLAM系统跟踪的地标。
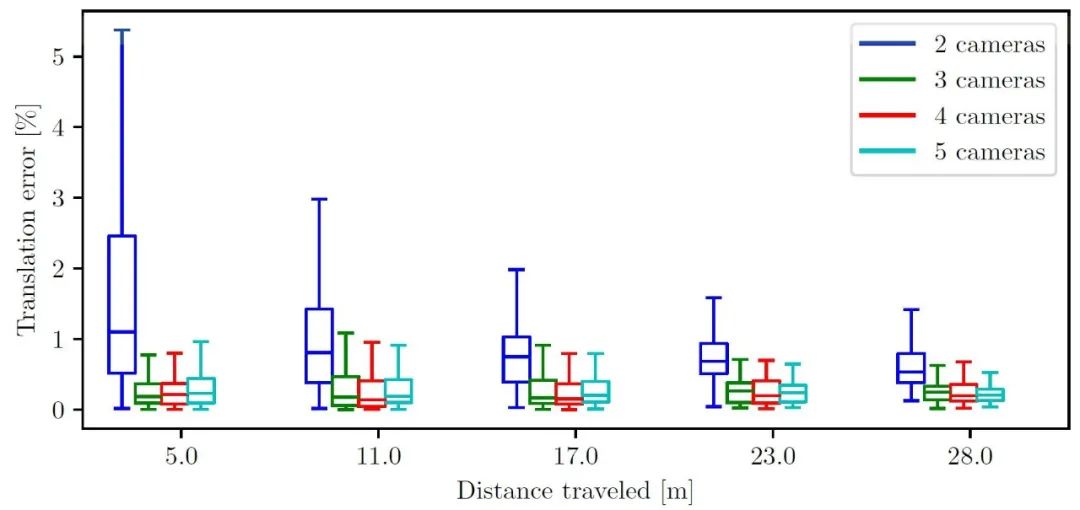
图6 5次运行模拟中的总体相对平移误差。
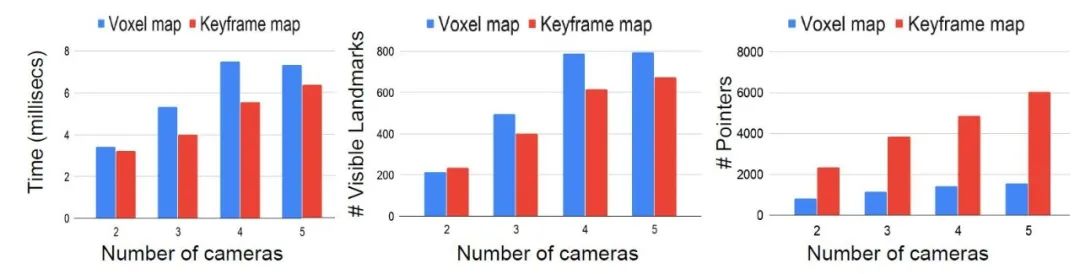
图7 针对不同的相机配置(2到5个摄像机),将建议的体素图与标准关键帧进行比较。左:VIO前端总时间。中间:从地图中检索匹配的地标。右侧:指向地标位置的引用/指针的数量。

图8 含BA的EuRoC数据集的相对平移误差百分比。
表1 EuRoC数据集的RMSE中值(米)超过5次。以粗体突出显示的最低误差。

表2 EuRoC序列中5次运行的关键帧平均数。

图3 单目和立体设置的不同关键帧选择标准的关键帧平均数。
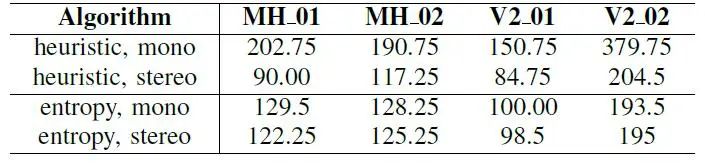
表4科学园日序列中多相机管道的不同轨迹误差度量。第一行包含完整轨迹的绝对RMSE(547.488米)

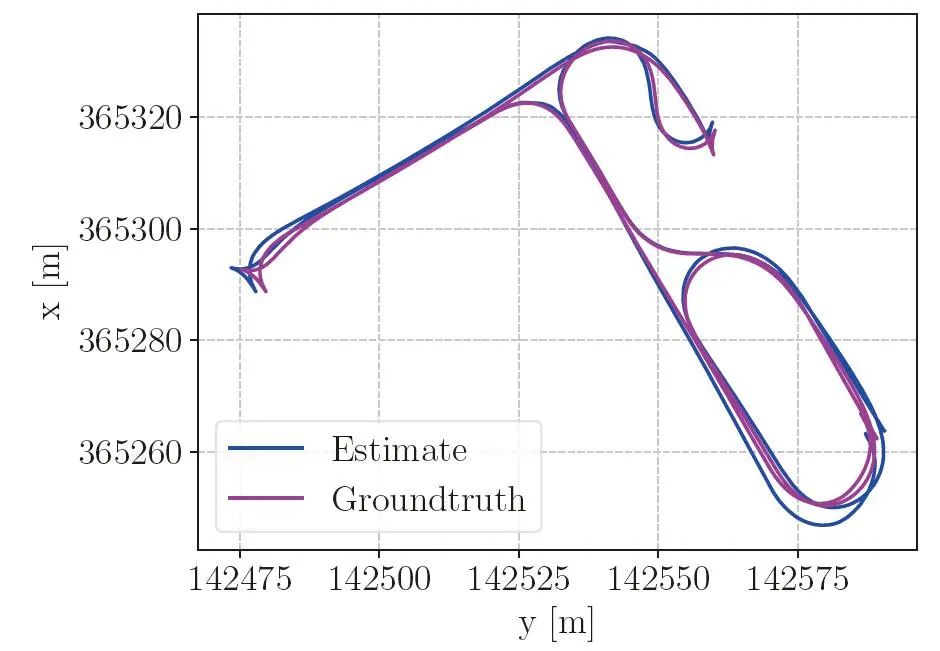
图9 科学园日序列中FRB配置的估计轨迹和基本轨迹的俯视图。
原文标题:任意多相机系统的SLAM重设计
文章出处:【微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
相机
+关注
关注
4文章
1383浏览量
54120 -
SLAM
+关注
关注
23文章
428浏览量
31995
原文标题:任意多相机系统的SLAM重设计
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
将40+台GigE工业相机连接到单一系统竟能零错误运行数天!

康谋方案 | BEV感知技术:多相机数据采集与高精度时间同步方案
一种基于MASt3R的实时稠密SLAM系统

利用VLM和MLLMs实现SLAM语义增强


MG-SLAM:融合结构化线特征优化高斯SLAM算法

友思特分享 车载同步技术创新:多相机系统如何实现精准数据采集与实时处理?
从算法角度看 SLAM(第 2 部分)


【直播预告】AI系统的多相电源原理与应用

深度解析深度学习下的语义SLAM

工程实践中VINS与ORB-SLAM的优劣分析






 工商网监
工商网监
评论