 基于树莓派的自动回收瓶子的智能机器人设计方案
基于树莓派的自动回收瓶子的智能机器人设计方案
我们使用了带有Arduino(克隆)的Raspberry Pi来控制移动平台。瓶子识别软件基于基于Haar功能的级联分类器,用于通过OpenCV进行对象检测。Raspberry Pi上的代码是用Python编写的,它提供了比C / C ++更快的开发时间,但是开销更大。事实证明,这很有用,因为该机器人在很短的时间内就赢得了比赛。该文档非常广泛,因为它是必需的,并且从初始构想到最终零件以及仿真文件的每个细节都可用。
机器人会避开障碍物,直到摄像机看到并识别出瓶子,一旦在Raspberry Pi上运行Python脚本检测到瓶子,其位置就会转发到Arduino板上,后者在状态机中托管主程序,并传递至下一个状态:抓瓶子。抓住瓶子后,归位系统非常简单:它使用指南针沿着回收区域的方向(地图的拐角)移动,一旦检测到墙壁(而不是障碍物),它就会跟随它直到到达拐角处。释放瓶子。重复。

最初的计划是使用2个红外传感器和摄像头进行障碍检测,但是摄像头速度太慢,最终模拟结果表明,更多的红外传感器将是一个更简单的解决方案,并且同样有效,因此我们决定使用4个红外传感器并且仅将相机用于瓶子检测。指南针传感器在摄像机后面的原始位置遇到了很多麻烦,事实证明建筑结构地板上的金属条正在影响指南针值,并将其更高地安装在解决此问题的桅杆上。
责任编辑:xj
文章出处:【微信公众号:电路设计技能】欢迎添加关注!文章转载请注明出处。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
210文章
28239浏览量
206650 -
电路设计
+关注
关注
6668文章
2431浏览量
203439 -
智能
+关注
关注
8文章
1704浏览量
117431 -
树莓派
+关注
关注
116文章
1699浏览量
105541
原文标题:基于树莓派的自动回收瓶子的智能机器人
文章出处:【微信号:cirmall,微信公众号:电路设计技能】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
树莓派开发的最佳编程语言选择
树莓派(Raspberry Pi)是一款由英国树莓派基金会开发的信用卡大小的单板计算机,它以其低成本、易于编程和灵活性而受到广泛欢迎。树莓
ARM开发板与树莓派的比较
处理器 ARM开发板通常采用不同的ARM处理器,如Cortex-A系列、Cortex-M系列等,而树莓派则主要使用博通的ARM处理器。树莓派的处理器性能相对较高,尤其是在最新的
树莓派gpio有什么用,树莓派gpio接口及编程方法
一、树莓派GPIO的用途 树莓派(Raspberry Pi)是一款小巧、功能强大的单板计算机,广泛应用于编程教育、物联网项目、家庭媒体中心等领域。GPIO(General Purpos
什么是树莓派?树莓派是什么架构的
什么是树莓派 树莓派(Raspberry Pi,简写为RPi,别名为RasPi/RPI)是由英国“Raspberry Pi 慈善基金会”开发的一款为学习计算机编程教育而设计的微型电脑。
树莓派的功能用途是什么
、科研、工业控制、物联网、多媒体播放、家庭自动化等领域。 树莓派(Raspberry Pi)是一种小型、低成本的单板计算机,由英国的Raspberry Pi基金会开发,其功能和用途非常广泛。以下是
树莓派装ubuntu和raspbian哪个更好
树莓派(Raspberry Pi)是一款由英国树莓派基金会开发的单板计算机,广泛应用于教育、科研、物联网等领域。树莓
Hailo联手树莓派,开创人工智能新纪元
近日,人工智能处理器领导品牌Hailo正式宣布与树莓派展开深度合作。Hailo将为树莓派推出专用AI套件,支持
树莓派携手Hailo为其新品注入人工智能功能
套件用于支持树莓派5的AI功能。此次合作将以先进的人工智能功能助力专业以及创作爱好者在智能家居、安全、机器人等领域中提升解决
【开源作品】基于树莓派4B、ESP32制作的桌面机器人、气象站、立方光!
;gt;>点此查看全文
基于树莓派 4B DIY 能笑会动的桌面机器人
Emo是一款基于树莓派4做的个人伴侣
发表于 03-05 16:52
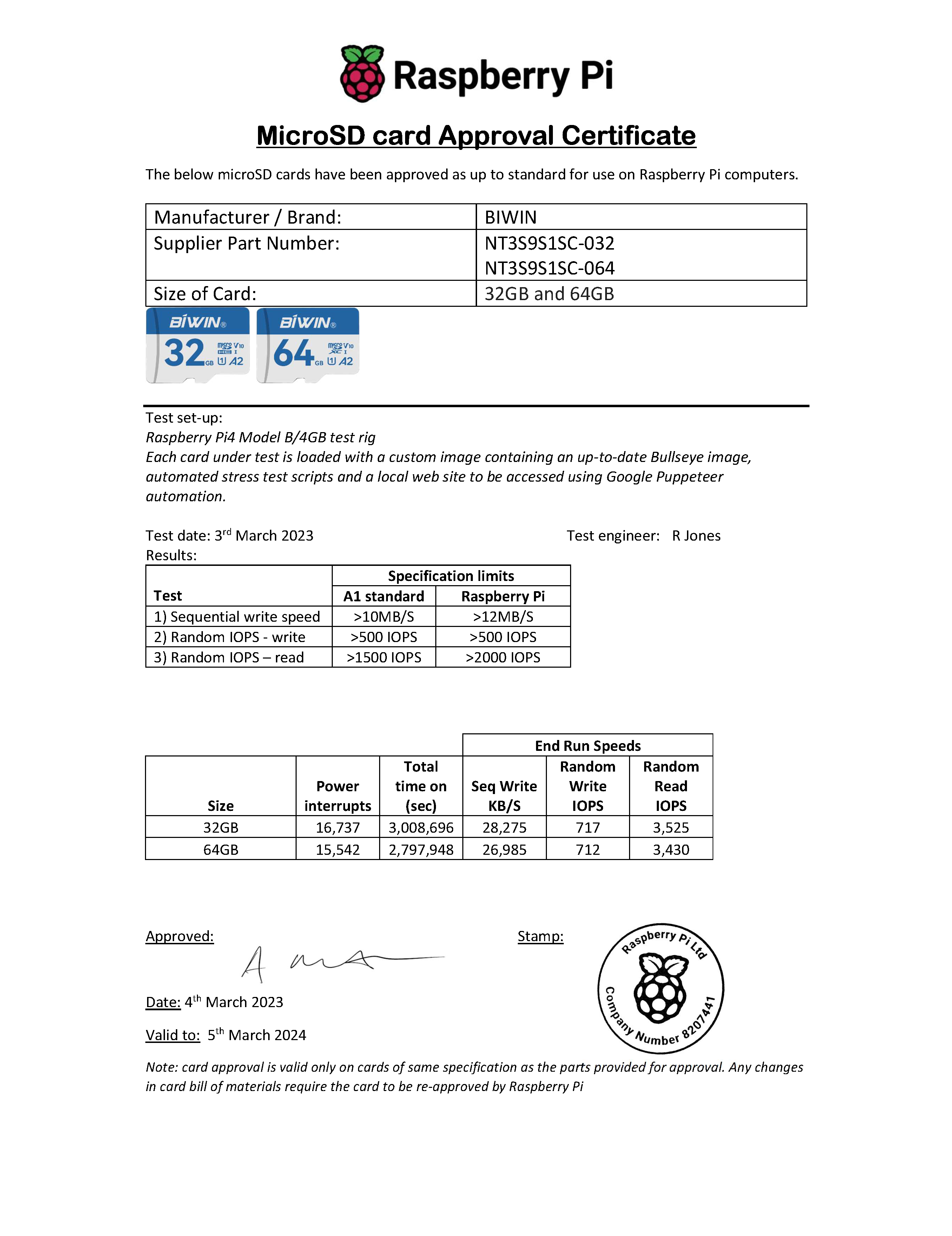
佰维存储microSD卡通过树莓派AVL认证
树莓派为英国树莓派基金会开发的微型单板计算机,其以小尺寸、高性能、低成本和易开发等特点,广泛应用于物联网、工业自动化、智慧农业、人工
基于树莓派的四足喷水机器人设计
今天小编给大家带来的是来自B-AROL-O团队带来的基于树莓派的四足喷水机器人,该机器人可以在农场环境中自主导航,识别需要浇水的植物并自动浇

基于树莓派RP2040单片机设计的三阶魔方还原机器人
这是一款基于树莓派RP2040单片机设计的三阶魔方还原机器人,控制和魔方求解都使用单片机完成。对于随机打乱的三阶魔方,平均还原步骤数在21步左右。
树莓派主板如何连接电脑
连接树莓派到电脑是一个非常有用的功能,它可以让我们在电脑上进行树莓派的操作和管理。本文将详细介绍如何连接树莓派主板到电脑。我会从准备工作开始
【开源项目】Emo:基于树莓派 4B DIY 能笑会动的桌面机器人
Emo是一款基于树莓派4做的个人伴侣机器人,集时尚与创新于一身。它不仅仅是一款机器人,更是一个活生生的存在,与其他机器人不同,它拥有独特的
发表于 12-26 15:18





 工商网监
工商网监
评论