 易于访问且低成本的两轮差速驱动机器人设计方案
易于访问且低成本的两轮差速驱动机器人设计方案
Linorobot是一套与ROS兼容的开源机器人,旨在为学生,开发人员和研究人员提供一个低成本平台,以在ROS(机器人操作系统)之上创建令人兴奋的新应用程序。Linorobot支持您可以从头开始构建的不同机器人基础。
Linorobot是使用易于访问的硬件构建的,因此任何人都可以在家中构建它。每个Linorobot平台都有其自己的硬件控制器,该控制器将ROS导航堆栈发布的速度(X,Y,Z或转向角)转换为从每个平台的运动学中得出的马达运动。每个控制器都具有模块化和可扩展性。无需重写固件或至少重用尽可能多的代码,即可为更大的机器人更换组件 。
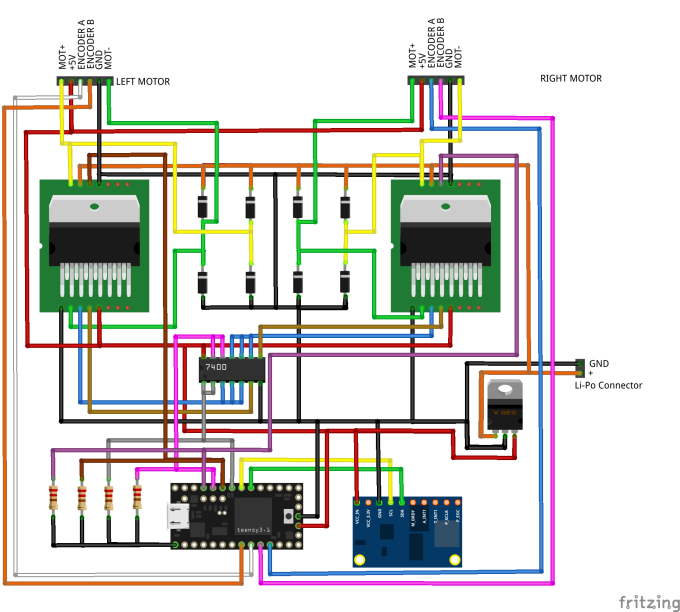
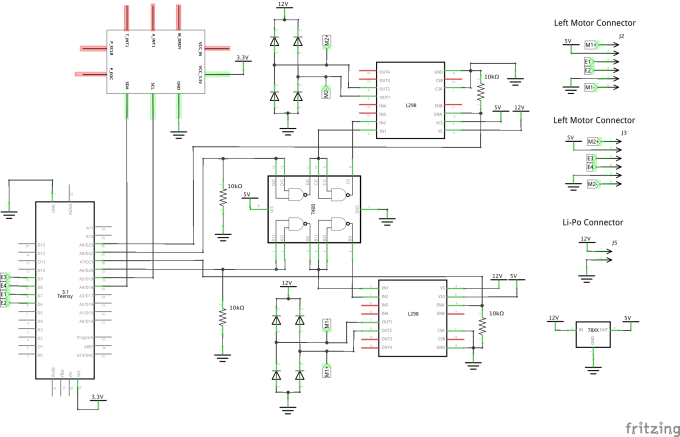
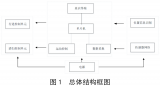
它的大脑由连接到Teensy 3.1微控制器的Radx Rock Pro开发板提供动力,以驱动电机并获取IMU数据,作为机器人里程表的一部分。Neato XV-11激光雷达安装在机器人顶部,用于定位(使用AMCL)和避障。
Linorobot由机器人中间件ROS驱动。在整个教程中,您将在构建自己的自主机器人时发现ROS强大而强大的软件开发框架。您可以使用SLAM(同时定位和映射)创建2D映射,了解AMCL(自适应蒙特卡洛定位),以及使用ROS开发机器人的基础知识。
所需组件
数量 x 组件名称
1× XV-11激光雷达
1× Radxa Rock Pro
1× 青少年3.1
1× GY-85 IMU
8 × 1N4001二极管
4 × 10K欧姆电阻器
1× 7400N芯片
1× LM7805稳压器
1× 面包板或原型板
1× 3S锂电池
1× 脚轮
2 × 电机轮
1× 压克力板或木板
责任编辑:xj
原文标题:易于访问且低成本的两轮差速驱动机器人
文章出处:【微信公众号:电路设计技能】欢迎添加关注!文章转载请注明出处。
-
机器人
+关注
关注
209文章
27415浏览量
202429 -
电路设计
+关注
关注
6603文章
2345浏览量
198327 -
驱动
+关注
关注
12文章
1739浏览量
84585
原文标题:易于访问且低成本的两轮差速驱动机器人
文章出处:【微信号:cirmall,微信公众号:电路设计技能】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
基于ACM32 MCU的两轮车充电桩方案,打造高效安全的电池管理

开源作品!稚晖君超迷你低成本开发板、超酷机器人、智能手环等参考方案
科聪停车移动机器人整体解决方案!

「科聪二次开发平台」移动机器人开发,只需3步!



一种全新磁控机器人设计制造技术研究
基于Matlab和VR技术的移动机器人建模及仿真
基于STM32的解魔方机器人设计方案

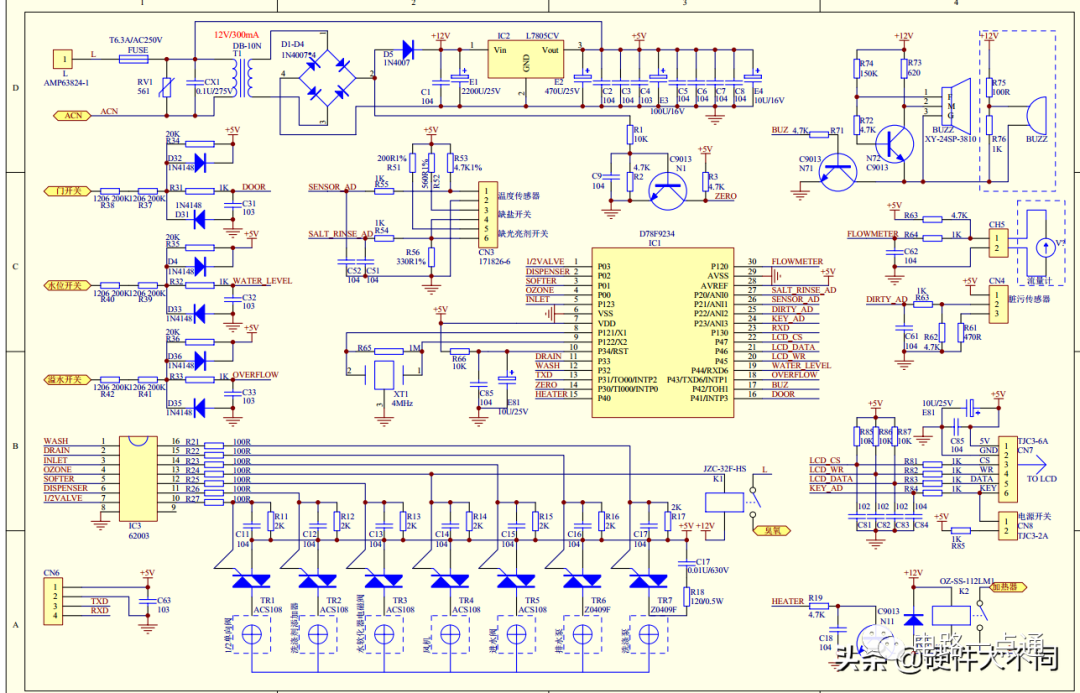
洗碗机电路原理图 低成本洗碗机电路设计方案
光伏组件智能清洁机器人设计方案
机器人设计:解决人类问题的新思路






 工商网监
工商网监
评论