 KUKAC4机器人使用的Dual NIC网卡
KUKAC4机器人使用的Dual NIC网卡
l网卡(英文缩写为 NIC)是连接电脑与本地网络的电子线路。
l每块网卡都拥有全球独一无二的识别码,即 MAC 地址 MAC 地址。该地址可从网卡上直接读取,也可利用其它工具 (ipconfig)读取。
l如今越来越多的高端网卡使用 1000 MBit 的传输速度。它们采用配备 RJ45 插头的双绞线电缆 (1000BASE-T)来连接。
l普通网卡只拥有一个以太网接口,特殊网卡会拥有多个(多达四个)。
DualNic - B 型网卡
库卡网卡 Dual NIC
lDual NIC 是一种包含两个 1000 Mbit/s 局域网适配器的网卡,
l它们是两个 VLAN。
l第二个端口与 PC 型号相关:
l主板 D2608-K KLI -KUKA 线路接口
l主板 D3076-K KSB - KUKA 系统总线
l在 KR C4 中,Dual NIC 在设备管理器里面不显示在网络适配器下。
l此卡不由 Windows 管理,不在 Windows 中进行参数配置,而是由 KUKA 实时操作系统 VX-Works 进行管理。
l因此全部网络适配器均在 KUKA Realtime OS Device 下显示。
l但是只有 KLI 端口(库卡线路接口)才可直接在库卡 HMI 上接受参数设定。
l在 KR C4 中,DualNIC 在设备管理器里面不是显示在 【网络适配器】之下。该网卡不受 Windows、而受库卡实时操作系统 VX-Works 的管理,也不在 Windows 里进行参数设置。因此所有网络适配器都是显示在库卡 【Realtime OS Devices】项下。但是只有 KLI 端口 (库卡线路接口)才可直接在库卡 HMI 上接受参数设定。

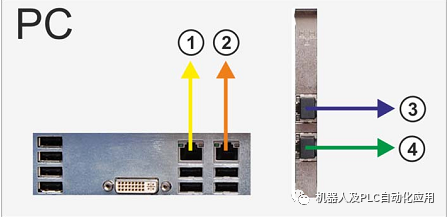
1 KONI - 库卡选项网络接口
2 KLI - 库卡线路接口 (KLI - KUKA Line Interface) 用于PROFINET网络控制
3 KSB - KUKA 系统总线
4 KCB - KUKA 控制器总线
责任编辑:lq
-
控制器
+关注
关注
112文章
16382浏览量
178327 -
机器人
+关注
关注
211文章
28466浏览量
207323 -
总线
+关注
关注
10文章
2888浏览量
88134
原文标题:KUKA C 4网卡DualNic的功能
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
开源项目!能够精确地行走、跳舞和执行复杂动作的机器人—Tillu
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
【书籍评测活动NO.51】具身智能机器人系统 | 了解AI的下一个浪潮!
使用机器学习和NVIDIA Jetson边缘AI和机器人平台打造机器人导盲犬
开源项目!用ESP32做一个可爱的无用机器人
开源项目!用ESP32做一个可爱的无用机器人
柔性机器人与刚性机器人区别与联系






 工商网监
工商网监
评论