 Mobileye英特尔激光雷达详细介绍
Mobileye英特尔激光雷达详细介绍
2021年1月11日,Mobileye/英特尔正式发布了其FMCW激光雷达,准确地说是激光雷达SoC。
这款不足名片大小的芯片级激光雷达预计在2025年量产,同时量产的还有Mobileye的EyeQ6。一向做视觉处理器的Mobileye居然出了款激光雷达,令人颇为好奇。实际从英特尔的角度看,做激光雷达是顺理成章的事。激光雷达某种意义上可以看做一种特殊的激光收发器,而英特尔在服务器领域有强大的光纤收发器产品线,英特尔在光电领域根基深厚,英特尔也推出了用于室内环境的L515激光雷达,有效探距最远9米。2020年5月SPIE(国际光学工程学会)大会上,英特尔光纤收发器事业部的工程师Jonathan K. Doylend对车载芯片级激光雷达做了详细介绍。
与其他FMCW激光雷达不同之处在于英特尔的是真正固态,没有运动部件,体积很小。
上市公司Aeva的FMCW激光雷达,虽然也说自己有自研芯片,但那只是光调制芯片,仍然需要光波束转向扫描器,可以选择棱镜、振镜、旋转镜或MEMS,体积仍然庞大。
车顶4个Blackmore的FMCW激光雷达,体积也很庞大。 2017年英特尔申请了一个小型固态激光雷达的专利,基本上就是2021年这个芯片的介绍。
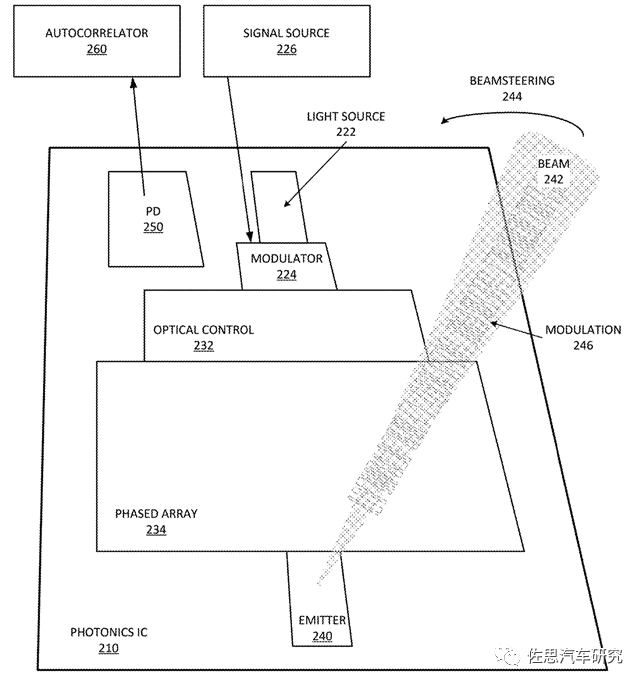
和图片位置基本都可以一一对应。
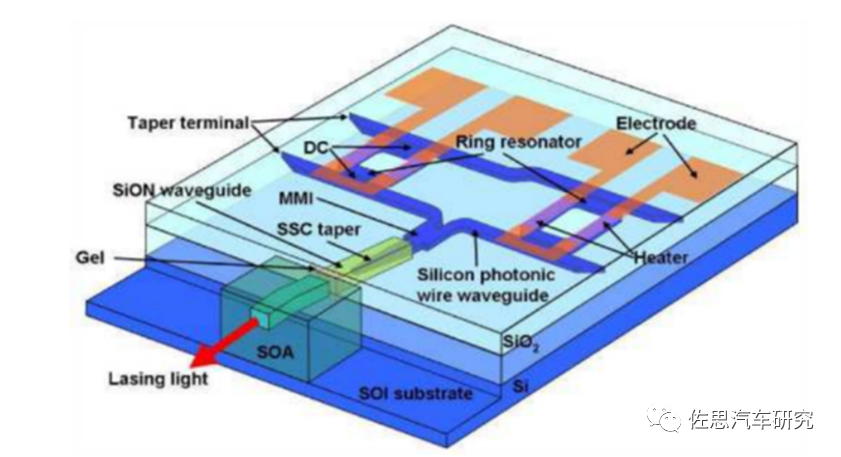
上图为英特尔激光雷达光信号流程图。
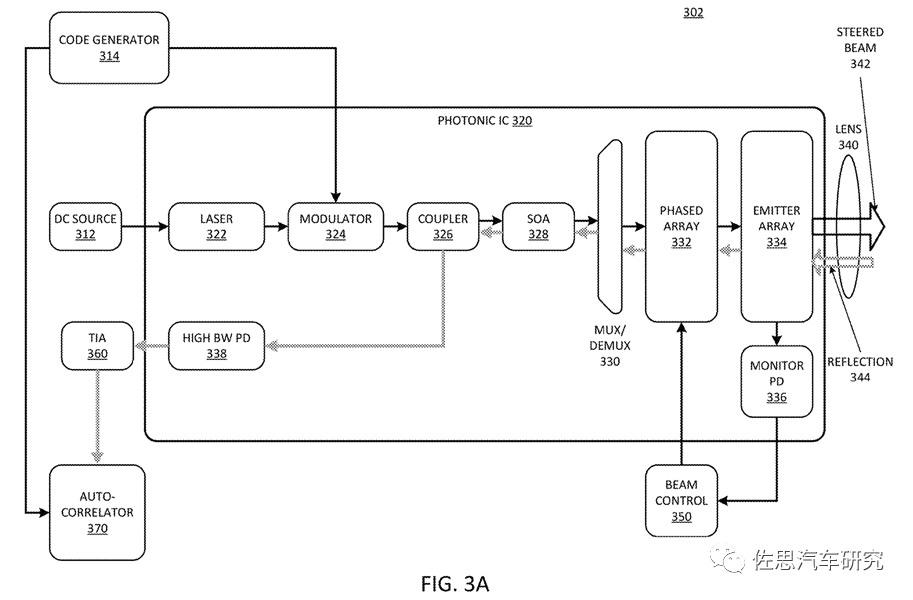
上图为英特尔工程师Jonathan K.Doylend在SPIE大会上演讲的PPT,实际与专利申请中的信号流程图差不多。 FMCW激光雷达与我们现在常用的几百人民币的毫米波雷达原理完全相同。
即拍频原理,有一个信号发生器发出频率随时间呈三角波变化的信号给发射机(激光雷达发出信号),然后接收机接收这个频率呈三角状变化的信号,回波的频率变化规律与发射的相同,但是存在时间延迟,这就导致相同时间的频率有微小的差别。通过对两个信号的拍频测量就可以得到距离信息。
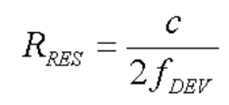
D为探测的距离,fb为频率差,c为光速,ts为三角波调频的半周期,fDEV为调频范围,所以现在距离在其他值确定的情况下是频率差的函数,距离精度由上式决定。发射信号的重复周期T决定了激光雷达能实现的最大无模糊距离,只有在时间T或者更短的时间内被接收到的回波信号才能解调出正确的距离信息。 距离分辨力:FMCW激光雷达的距离分辨力Sr(range resolution)代表该雷达单次测量中可区分的目标间最小距离,单纯地由光源调制带宽B决定 ,并满足:Sr≥c/(2B); 角分辨力:FMCW激光雷达的角分辨力(angular resolution)指激光雷达在单次探测中把距离R相同但是相对角度不同的目标区分开的能力,根据高斯光束的瑞利判据,光束发散角θ受到发射端准直器的孔径d与光载波波长λ的影响,满足θ=1.27λ/d;那么在测量距离为R时,可区分的径向距离SA可表示为SA≥2R⋅sin(θ/2)。在工作波长固定的前提下,为了提高角分辨能力,常用的方法是增加天线孔径d以减小光束发散角。 距离测量与角测量的准确度:FMCW激光雷达的距离测量准确度(accuracy)代表雷达测得的距离分布的均值与真实距离之间的差距,其主要受到光源频率调制的线性度和测量系统校准的影响;角测量准确度受到发射端扫描器件的角度准确度影响。 距离测量与角测量的精度:FMCW激光雷达的距离测量与角测量结果的精度(precision)反映了雷达对同一目标测量结果的一致性程度,受到光源的各参数稳定度和角扫描重复性与最小步长的影响。
测量速率:FMCW激光雷达的测量速率是指雷达获得一个探测数据的时间的倒数,其主要受限于调制信号重复速率,高重复速率代表了更快的测量刷新率与测量效率。但是值得注意的是,高重复速率和长可探测距离不可兼得,需要考虑信号重复周期、接收端带宽,ADC采样速率和存储器深度等限制因素并具体分析。 FMCW激光雷达的指标主要受限于光源的性能参数:在接收端的相干检测方法都比较成熟;由于高速模数转换器(analog to digital converter,ADC)、数字信号处理(DSP)等技术的快速发展,后端数据的采集和处理目前也不是整体指标的瓶颈;所以如何产生性能优越的光调频信号成为了FMCW激光雷达研究者们关注的重点。根据调谐器件与激光器的关系,目前实现激光光载波频率调制的方法可以分为内调制技术和外调制技术两种。内调制技术是指调制过程与激光振荡建立同时进行的调制技术,通过调制改变激光腔的谐振参数,从而实现激光器输出频率的变化,主要包括调制谐振腔的光学长度或改变腔内的增益损耗谱位置等方式;外调制技术是指在激光振荡建立之后,在激光射出的光路上使用调制器对光场参数进行调制的技术。 内调制技术是指在激光建立的过程中使用调制信号去控制激光振荡的某一参数,以达到控制激光的频率,强度等参数的目的。其中激光振荡的参数包括谐振腔腔长、增益谱位置、腔内损耗等,可以通过腔长调谐,电流注入调谐等方式实现。
腔长调谐多用于近距离高精度应用,半导体激光器注入电调谐用于远距离场合。半导体激光器注入电流的变化改变了共振腔内的折射率,从而使腔内光程和谐振纵模模式都产生变化,实现了激光器输出纵模波长的调谐;腔外使用光电锁相环技术,通过负反馈作用实现了激光器频率调谐的线性变化,保证了频率调谐的高线性度。这种方案避免使用机械振动的部件,完全电控可调,而且调谐方式简单。用于做成芯片,是目前业内主要研发方向。但是由于半导体激光器本身的结电容限制了激光器的响应速率以及腔内光场建立时间的存在,使得可调谐范围、调谐速率、输出线宽等参数较难进一步提高。 外调制技术是指在激光器外部使用调制器件对激光器输出的强度频率稳定的连续激光进行调制,以实现控制激光光场强度、频率、偏振、角动量等参数的目的。对于激光线性调频而言,目前应用比较广泛的是基于声光效应的声光调制和基于电光效应的电光调制两种外调制方式,但是由于声光调制的工作带宽相对较窄,所以大多数外调制方案都采用电光调制器作为腔外的频率调谐器件。但体积庞大,难以芯片化,主要用在非车载领域。 英特尔累积多年的光电半导体制造经验,初创企业根本不能与其同日而语,差距超过20年以上,尤其是制造工艺的摸索,同时英特尔拥有庞大的产能。
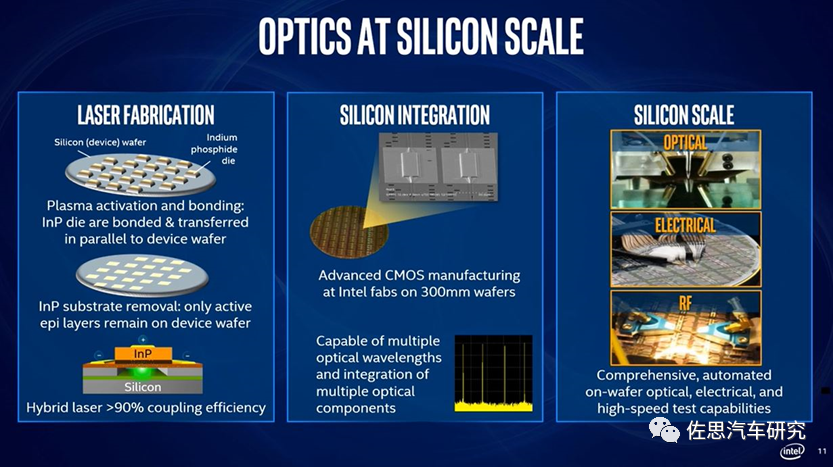
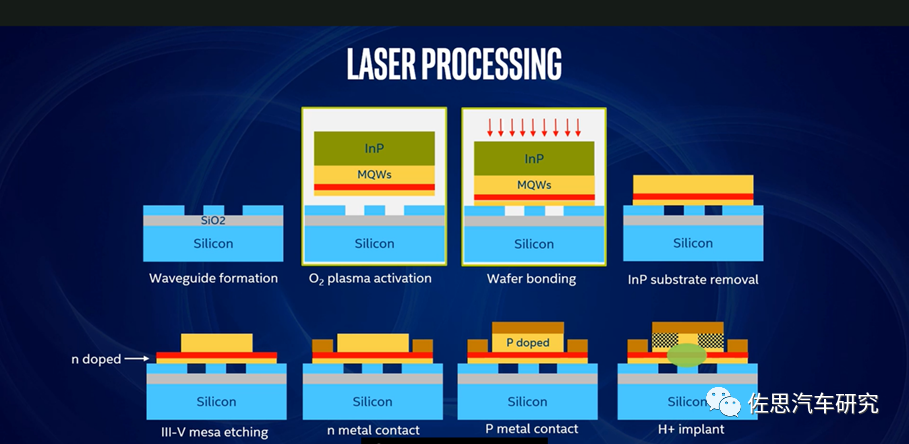
在激光器方面,英特尔自然是沿用光纤激光器最常见的InP型,在硅晶圆表面等离子注入并绑定InP裸晶,然后离子蚀刻去除InP基板,只保留EPI即外延层,这是复合半导体的传统工艺。英特尔称之为Hybrid激光。
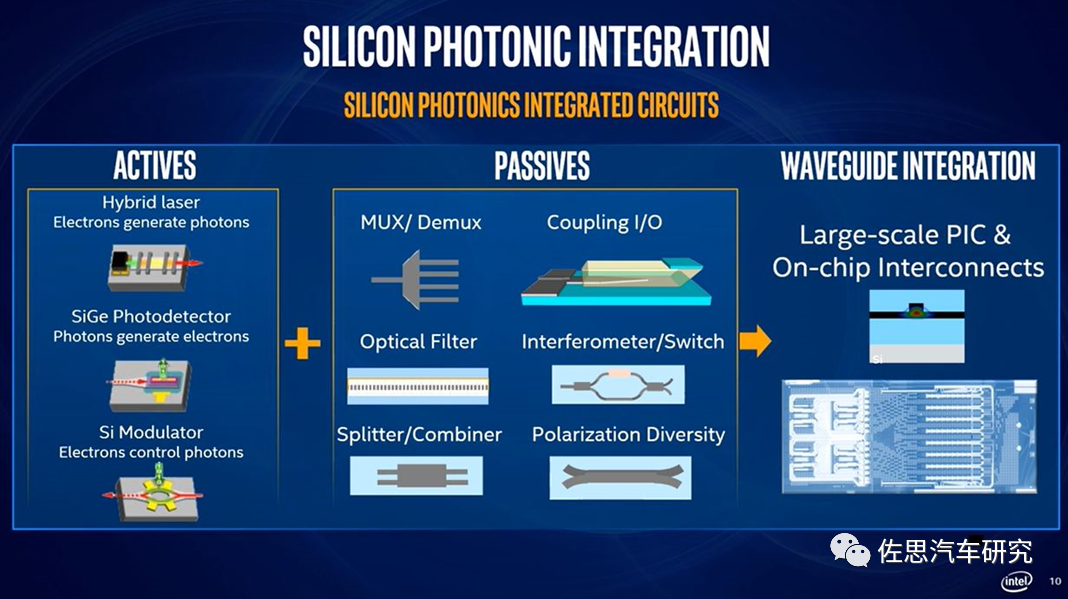
除了激光,接收光电二极管也是少见的硅锗型,这是InP激光波长对应的材料,激光调制方面还是传统的硅。无源的如光纤滤波、分光器、合光器、MUX/Demux都采用英特尔先进的12英寸硅晶圆CMOS工艺。
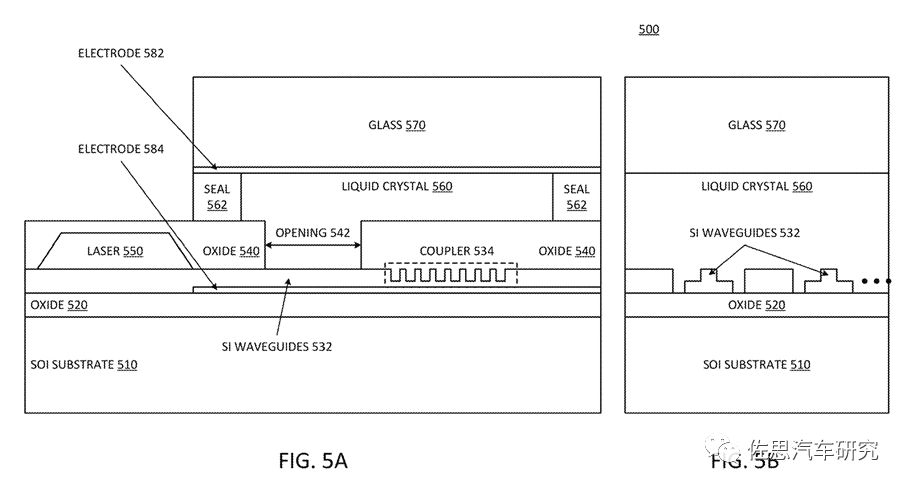
上图为英特尔专利硅液晶波导
在扫描器方面,英特尔可能使用了液晶转向波导技术。
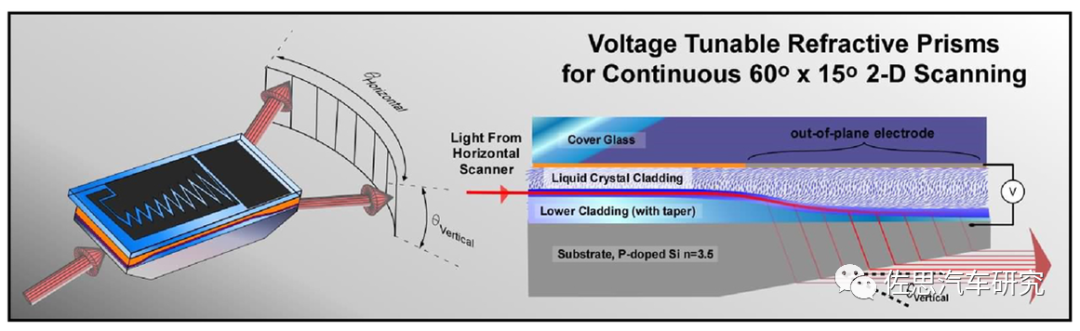
当液晶分子有序排列时表现出光学各向异性,光通过液晶时,会产生偏振面旋转,双折射等效应。在两块玻璃板之间夹有正性向列相液晶,液晶分子的形状如同火柴一样,为棍状。棍的长度在十几埃(1埃 =10-10米 ),直径为4~6埃,液晶层厚度一般为5-8微米。玻璃板的内表面涂有透明电极,电极的表面预先作了定向处理(可用软绒布朝一个方向摩擦,也可在电极表面涂取向剂),这样,液晶分子在透明电极表面就会躺倒在摩擦所形成的微沟槽里;使电极表面的液晶分子按一定方向排列,且上下电极上的定向方向相互垂直。上下电极之间的那些液晶分子因范德瓦尔斯力的作用,趋向于平行排列。然而由于上下电极上液晶的定向方向相互垂直,所以从俯视方向看,液晶分子的排列从上电极的沿-45度方向排列逐步地、均匀地扭曲到下电极的沿+45度方向排列,整个扭曲了90度。
在未加驱动电压的情况下,来自光源的自然光经过偏振片P1后只剩下平行于透光轴的线偏振光,该线偏振光到达输出面时,其偏振面旋转了90°。这时光的偏振面与P2的透光轴平行,因而有光通过。首先在第A行加上高电平,其余行加上低电平,同时在列电极的对应电极c、d 上加上低电平,于是A行的那些带有方块的像素就被显示出来了。然后第B行加上高电平,其余行加上低电平,同时在列电极的对应电极b、e 上加上低电平,因而B行的那些带有方块的像素被显示出来了。然后是第C行、第D行……,以此类推,最后显示出一整场的图像。这种工作方式和传统的机械激光雷达扫描完全一致。 微软投资的Lumotive和国内的速腾聚创对液晶光波导可转向技术也很有兴趣。
上图是英特尔光波导与激光部分的剖面图,得益于英特尔强大的光通讯半导体能力才能实现。 FMCW激光雷达的优势除了信噪比高,功耗低外,还有一些优势,比如与距离物体远近不直接相关,区别于ToF激光雷达——越远测距准确度越低;与物体运动速度(含激光雷达与物体间相对运动)不直接相关, 相对运动越快,ToF测距准确度越差,甚至出现物体畸变。 FMCW的缺点是成本高,其所有元件都需要具备超高精度,因为调谐频率是THz级别的,这需要测量仪器级的元件,这种元件供应商极少,每个元件都需要高精度检测,良率低,费时费力即使将来量产,成本也居高不下。所有光学表面都必须在更严格的公差范围内,例如λ(波长)/20。
这些元件可能非常昂贵,而且供应商也很少。FMCW对ADC转换速率的要求是ToF系统的2~4倍,精度要求更高。对FPGA的要求是能够接收数据并进行超高速FFT转换。 即使使用ASIC,FMCW系统所需的处理系统复杂度(和成本)也是ToF系统的十倍。即使FMCW激光雷达达到百万级出货量,成本仍难低于500美元,相对于Flash和MEMS激光雷达,这个价格还是略高。 除了成本,FMCW虽然没有了外界因素的干扰,但自身会带来新的干扰,和毫米波雷达一样,FMCW激光雷达需要考虑旁瓣的干扰,FMCW系统依靠基于窗函数的旁瓣抑制来解决自干扰(杂波),该干扰远不如没有旁瓣的ToF系统健壮。为了提供背景信息,一束10微秒的FMCW脉冲可以在1.5公里范围内径向传播。在此范围内,任何对象都将陷入快速傅里叶变换(时间)旁瓣。即使是更短的1微秒FMCW脉冲也可能会被150米外的高强度杂波破坏。第一个矩形窗口快速傅里叶变换(FFT)的旁瓣是大家所知的-13dB,远高于获得优质点云所需要的水平。
此外,FMCW激光雷达有轻微延迟的问题,这是相干检测天生的缺陷,无法改变。 FMCW激光雷达的成熟度仍然是个问题,连英特尔这样的巨头都将量产定在2025年,初创公司只会更晚,这不像是传统CMOS芯片可以找人代工,这是复杂的复合半导体芯片,必须长时间摸索制造工艺。 专注于传统视觉处理器的Mobileye都倾力激光雷达,这正说明了视觉领域可挖掘的空间越来越小,而激光雷达的地位从质疑是否有存在的必要,到该用什么样的激光雷达。激光雷达这种主动传感器,技术挖掘潜力巨大,未来足以与传统视觉传感器平起平坐,甚至压倒传统视觉传感器。
原文标题:Mobileye/英特尔激光雷达剖析
文章出处:【微信公众号:佐思汽车研究】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
英特尔
+关注
关注
61文章
10061浏览量
172810 -
激光雷达
+关注
关注
969文章
4057浏览量
190842
原文标题:Mobileye/英特尔激光雷达剖析
文章出处:【微信号:zuosiqiche,微信公众号:佐思汽车研究】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
一则消息引爆激光雷达行业!特斯拉竟然在自研激光雷达?
Mobileye牵手Innoviz合作激光雷达用于其Mobile Drive平台
激光雷达在SLAM算法中的应用综述

激光雷达会伤害眼睛吗?

激光雷达的维护与故障排查技巧
激光雷达技术的基于深度学习的进步
激光雷达技术的发展趋势
Mobileye关闭激光雷达研发部门
英特尔酝酿出售Mobileye股权以应对挑战
光学雷达和激光雷达的区别是什么
激光雷达点云数据包含哪些信息
一文看懂激光雷达

硅基片上激光雷达的测距原理

激光雷达的探测技术介绍 机载激光雷达发展历程






 工商网监
工商网监
评论