 PLC安全门两区域间光电-故障控制改进
PLC安全门两区域间光电-故障控制改进
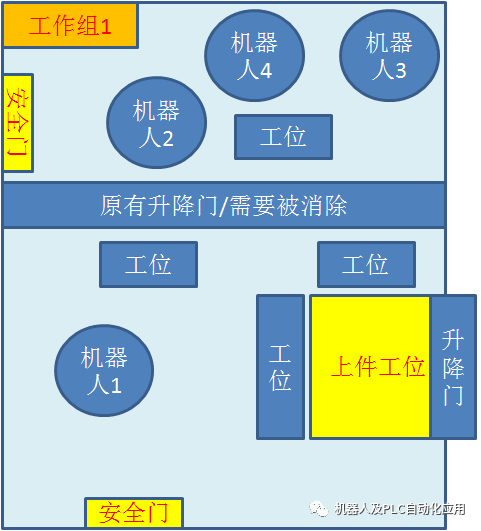
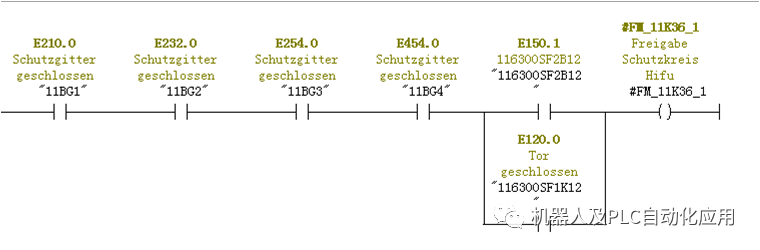
原始程序布局状态
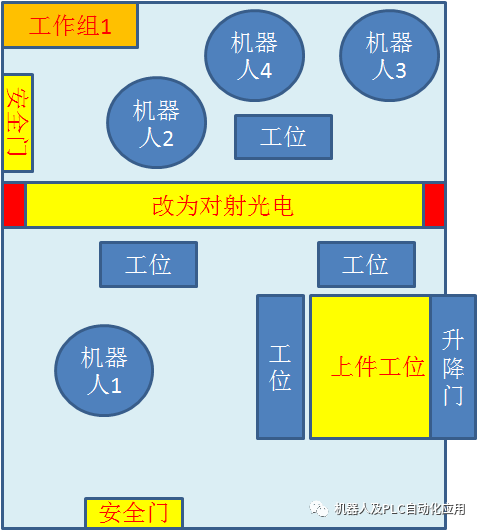
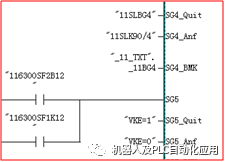
改进后的布局状态:
1.将机器人E14机器人安全加入光电及升降门信号.
2.机器人安全门回路加入光电和升降门信号.
3.误闯光电会引起工作组1报安全门故障.
1.将机器人E14机器人安全加入光电及升降门信号.
编程速度快,改动最小,影响范围小,安全系数低.
2.机器人安全门回路加入光电和升降门信号.
打开升降门后,如果挡光电会引起机器人2号的安全门回路断开,使机器人以安全停止1的方式停止.
相对1的解决方案,这个方案的安全系数更高,完全控制了2 号机器人,但当人员跨过新加光栅后,3号/4号机器人仍然在运动,还是有一定的安全风险.
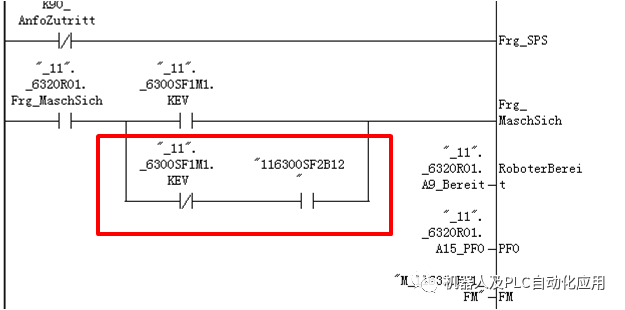
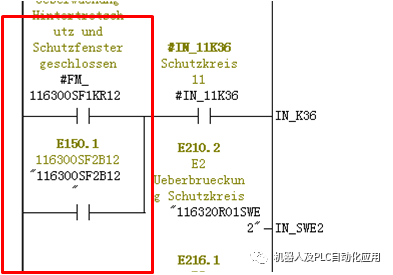
3.误闯光电会引起工作组1报安全门故障.
并入安全门控制回路,如果开着升降门直接闯过光栅,将使整个工作组1停止产生安全门开故障.
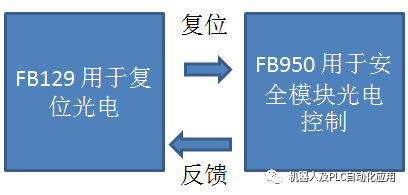
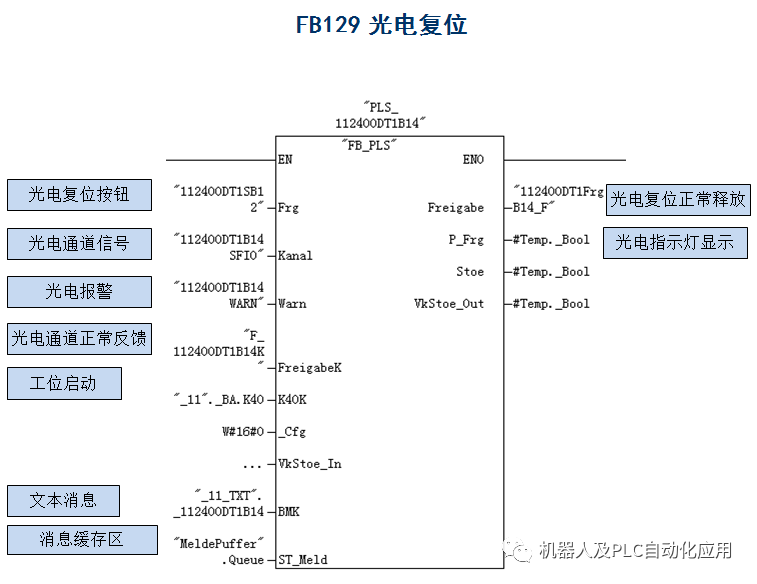
光电复位示意图:
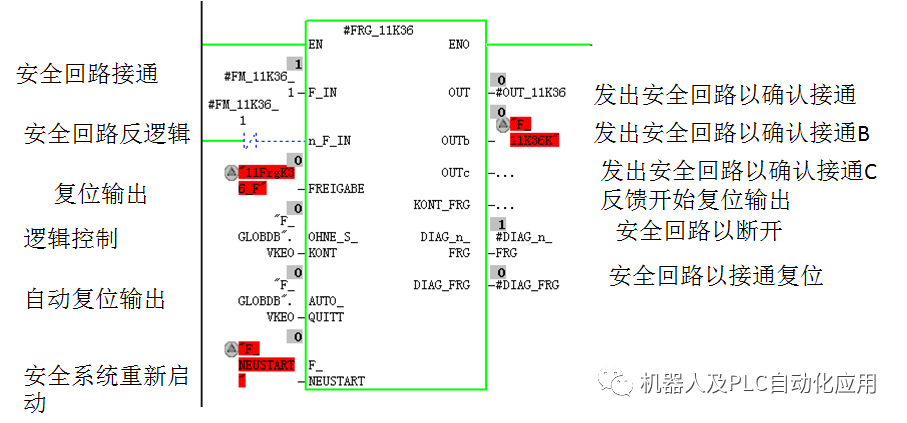
FB950接口设置
责任编辑:lq
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28468浏览量
207356 -
光电
+关注
关注
8文章
742浏览量
81676 -
plc
+关注
关注
5012文章
13314浏览量
463816
原文标题:PLC安全门两区域间光电-故障控制改进
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
LT1-B18-C反射板光电开关控制门的原理是什么
反射板光电开关控制门的原理是基于光电传感技术的,通过检测红外线光束的遮光或反射来触发开关动作。在门禁系统中,这种开关具有广泛的应用前景。
仓门限位开关INCHI-CMS/D1B 防碰撞安全门装置器技术参数
仓门限位开关及防碰撞安全门装置器。在选择和使用这些设备时,建议查阅具体产品的技术手册或咨询供应商以获取准确的技术参数和性能信息。
PDF-300AK永磁式安全门保护装置的构成及产品介绍
永磁式安全门保护装置是一种高效、安全、可靠的安全防护设备,其独特的磁感应原理和稳定的性能使得它在各个领域都有广泛的应用前景。
plc故障排查方法及技巧
在工业自动化领域,PLC(可编程逻辑控制器)扮演着枢纽角色,监控并调控生产流程的每个环节。然而,和所有高精密设备一样,PLC也难免出现故障,这些故障
三菱plc通讯故障一般怎么处理
三菱PLC(可编程逻辑控制器)是一种广泛应用于工业自动化领域的设备。在实际应用中,PLC通讯故障是比较常见的问题之一。 一、三菱PLC通讯

西门子PLC总线故障怎么解决
在工业自动化领域,西门子PLC(Programmable Logic Controller,可编程逻辑控制器)以其高可靠性、强稳定性和丰富的功能而备受青睐。然而,在实际应用中,PLC总线故障
PLC如何快速排除故障
PLC(可编程逻辑控制器)在工业自动化领域中扮演着至关重要的角色,然而,如同所有复杂系统一样,PLC也可能会出现故障。为了快速排除这些故障并
上位机与plc通讯故障怎样做报警
在工业自动化领域,上位机与PLC(可编程逻辑控制器)之间的通讯是实现设备监控和控制的关键。然而,通讯故障可能导致生产中断、设备损坏甚至安全事
什么是PLC的故障诊断功能?
PLC的故障诊断功能是指PLC系统能够自动检测、识别和报告设备或系统中潜在或已经发生的故障,从而帮助用户及时采取相应措施进行修复,确保生产过程的稳定和






 工商网监
工商网监
评论