 研究人员使用事件驱动型图像传感器提升无人机的安全性
研究人员使用事件驱动型图像传感器提升无人机的安全性
苏黎世大学(University of Zurich,简称“UZH”)和代尔夫特理工大学(Delft University of Technology)研究人员使用事件驱动型图像传感器,帮助一架多旋翼无人机在一个电机出现故障时继续飞行。
据麦姆斯咨询报道,瑞士和荷兰的研究人员使用事件驱动型图像传感器提升了多旋翼无人机的安全性。
通常,多旋翼无人机的一个电机出现故障时,无人机将会不受控制地旋转,稳定性变差,导航失灵。这种情况下,大型无人机可以使用全球卫星导航定位系统(GNSS)卫星接收器尝试重新控制系统,但这对小型无人机来说是无法实现的。
“当其中一个旋翼失灵时,无人机会像芭蕾舞演员一样旋转,这种高速旋转运动会导致标准控制器失效,除非无人机能够进行非常精确的位置测量。”Davide Scaramuzza说。他是苏黎世大学机器人及感知小组(Robotics and Perception Group)负责人,也是资助该项研究的瑞士国家机器人能力中心(NCCR Robotics)救援机器人大挑战(Rescue Robotics Grand Challenge)负责人。
作为一种替代方案,研究人员开发的技术将标准相机数据与仅对图像变化做出反应的事件驱动型图像传感器结合。法国Prophet和英国Opteran等公司正在将这些事件驱动型、神经形态或脉冲神经网络(Spiking Neural Network,简称“SNN”)图像传感器商业化。研究团队计划将该技术开源发布。
随着越来越多的无人机被用于运送货物,这些无人机在发生故障时是否能安全着陆变得越来越重要。
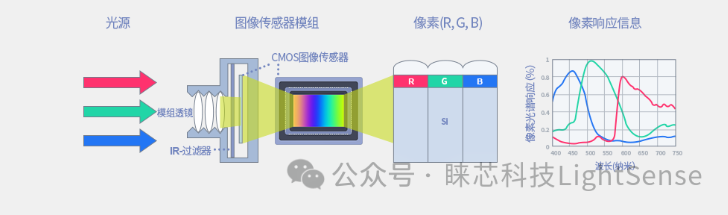
该研究团队开发了一种算法,结合两个标准CMOS图像传感器信息,追踪四旋翼无人机相对于参照物的位置。这使得无人机只要还有三个旋翼正常工作,无论是在飞行还是旋转下,都可以通过机载计算机对其进行控制。
研究人员发现,这两个标准CMOS图像传感器在正常光照条件下都表现良好。“然而,当光照减弱时,标准CMOS图像传感器开始出现运动模糊,导致无人机迷失方向,最终坠落,而基于事件驱动的图像传感器在非常弱的光照下也能很好地工作。”Scaramuzza实验室研究人员Sihao Sun说。
“最先进的飞行控制器可以稳定和控制四旋翼无人机,即使在它失去一个完整旋翼的情况下。然而,这些措施依赖于外部传感器,如全球定位系统(GPS)或运动捕捉系统等,以进行状态预判。据我们所知,机载传感器还没有实现这一点。”他表示。
该问题的主要挑战来自于不可避免的高速偏航旋转(超过20弧度/秒),该高速偏航旋转导致相机运动模糊,这是视觉惯性里程计(Visual Inertial Odometry,简称“VIO”)的难题。而基于事件驱动的图像传感器具备高动态范围(High Dynamic Range,简称“HDR”)和高时间分辨率。
“实验表明,我们的方法能够在一个电机故障情况下准确控制四旋翼无人机位置。我们相信,该方法将提高四旋翼无人机在GPS失灵或信号较差情况下的安全性。”Sun表示。
该团队计划将控制器和视觉惯性里程计算法开源发布。
原文标题:事件驱动型图像传感器,提升极端情况下无人机的安全性
文章出处:【微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
传感器
+关注
关注
2550文章
51071浏览量
753307 -
控制器
+关注
关注
112文章
16350浏览量
177939 -
无人机
+关注
关注
230文章
10430浏览量
180294
原文标题:事件驱动型图像传感器,提升极端情况下无人机的安全性
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
民用无人机反制设备:守护空域安全的重要利器
霍尔传感器在无人机中的应用

无人机反制系统:构建空中安全的智能防线!特信无人机反制
特信无人机反制设备 手持无人机探测器:精准定位,快速反制





 工商网监
工商网监
评论