 机器人控制系统工具坐标的特点及用途
机器人控制系统工具坐标的特点及用途
工具坐标的特点及用途
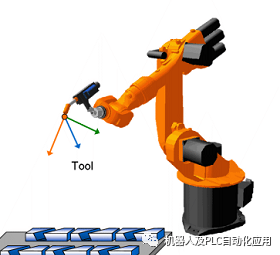
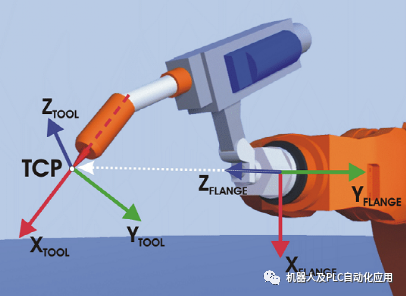
机器人控制系统通过测量工具 (工具坐标系)识别工具顶尖 ( TCP - Tool Center Point,即工具中心点 )相对于法兰中心点位于何处以及其方向如何。


因此,工具测定包括
TCP (坐标系原点)的测量
找正坐标系
找正最多可储存 16 个工具坐标系。(变量:TOOL_DATA[1…16])。
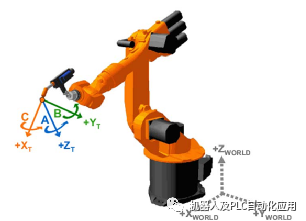
测量时,工具坐标系到法兰坐标系的距离(用 X、Y 和 Z)以及坐标系的转角(角度 A、B 和 C)被保存。
如果一个工具已精确测定,则在实践中对操作和编程人员有以下优点:
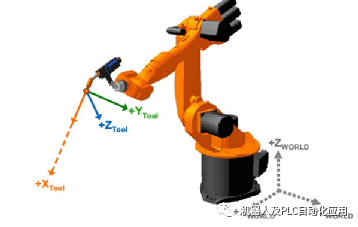
改善手动运行
可围绕 TCP (例如:工具顶尖)改变方向。
沿工具作业方向移动
在轨迹运动编程(直线或圆形运动)时使用
沿着 TCP 上的轨道保持已编程的运行速度。

此外,可沿着轨迹进行定义的方向导引。
下面我们说一下通过WorkVisual 进行坐标设定
编辑工具和基坐标系
打开工具/基坐标管理可对工具和基坐标系统进行创建、编辑和删除。另外可用拖放功能将坐标系分配给另一个编号。
选择菜单矊列编辑器-> 工具/基坐标管理。

机器人使用坐标总览:

双击可以进入单个坐标设置:可以进行坐标编辑.

导入工具和基坐标系;

直接在文件 $config.DAT 中对工具和基坐标系作出的更改可以导入项目中。
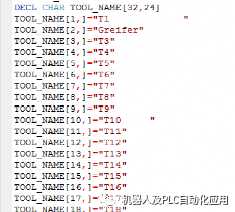
工具坐标的名称变量:
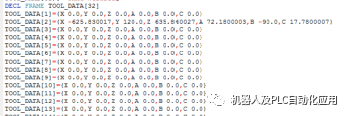
工具坐标的参数变量:
责任编辑:xj
原文标题:WorkVisual 编辑工具坐标
文章出处:【微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
-
控制系统
+关注
关注
41文章
6604浏览量
110576 -
机器人
+关注
关注
211文章
28379浏览量
206916
原文标题:WorkVisual 编辑工具坐标
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
伺服控制机器人的控制方式有哪些
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
如何使用PLC控制机器人
简述工业机器人控制系统的特点
机器人控制系统的基本单元有哪些
工业机器人控制系统的主要功能
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
基于飞凌嵌入式RK3568J核心板的工业机器人控制器应用方案
浅谈海康机器人控制系统






 工商网监
工商网监
评论