 美国瘫痪患者用脑信号使用双机械臂吃蛋糕
美国瘫痪患者用脑信号使用双机械臂吃蛋糕
上个月,瘫痪 30 多年的罗伯特·布兹·克米勒维斯基(Robert Buz Chmielewski)向世界展示了如何通过大脑,控制两支机械手臂拿起餐具给自己喂食的全过程。
在视频中,Chmielewski 通过自己的大脑信号使用刀叉切割食物,随后命令机械手臂将食物带到嘴边几英寸处,进而吃掉。
Chmielewski 的成就标志着,受疾病或伤害影响的患者将向恢复自控能力迈出了一大步,第一次,人类可以用双侧大脑植入物使截瘫患者控制两条机械手臂,并产生了两手触摸的感觉。
解码脑信号 控制双臂
Chmielewski 是一名 C6 脊髓损伤的患者,他的大脑健康,脖子以下神经完好无损,但肩膀以下均为瘫痪状态,仅剩肩膀和手腕的一些残余功能。2019 年 1 月,Chmielewski 作为约翰斯·霍普金斯大学一项脑机接口研究的参与者,通过一次长达 10 小时的手术,将六个微电极阵列(MEA)植入大脑两侧。随后,研究者一直试图通过不断的改善和训练,让他获得同时控制两个假肢的能力。
据悉,这项由国防高级研究计划局(DARPA)拨款,由约翰·霍普金斯大学的物理医学与康复学系(PM&R)、应用物理实验室(APL)、神经内科与神经外科共同合作的临床研究,旨在研究可以帮助瘫痪和肢体残缺患者获得更加独立生活能力的技术。
该团队的主要方法是,将六个微电极阵列(MEA)分别植入到参与者的大脑两个半球中,其中一半在运动皮层中,另一半在感觉皮层中。
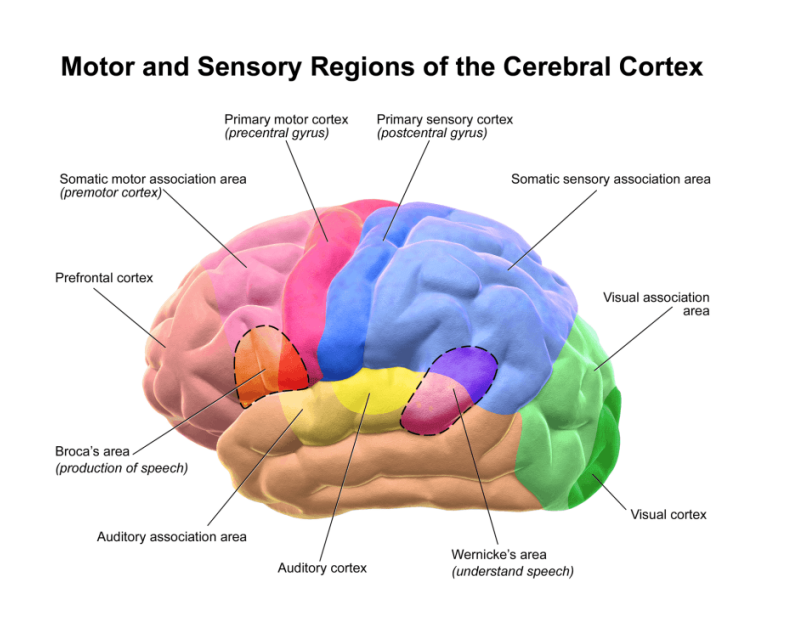
众所周知,运动皮层是额叶的一个区域,位于中央沟前的后中央回的一大块灰质,在解剖学上称“中央前回”,亦称“第Ⅰ躯体运动区”。它是大脑皮层中参与计划、控制和执行自主运动的区域,支配躯体各部分的运动,电刺激该部位会引起运动反应。
感觉皮层则是负责接收和解读来自身体不同部位的感觉信息。从不同的感受器(例如伤害感受器和热感受器)接收的刺激被转导为动作电位,该动作电位可以沿着一个或多个传入神经元传递到大脑的特定部位。
在该项目中,MEA 可以绕过受损的脊髓,读取大脑产生的运动信号,并刺激感觉信号。此外,这些 MEA 还可以通过电线连接到机械臂(或其他效应器,如光标屏幕,虚拟效应器等),从而允许来自大脑的神经信号向其他设备发送消息,反之亦然。
在实验中,研究小组植入的 MEA 允许计算机读取来自参与者运动皮层的信号,这些信号传达了运动意图。紧接着,计算机解码这些信号并将其发送到机械臂,从而使参与者可以像他真实的手臂一样,控制其运动。
此外,研究小组通过多电极阵列读取大脑信号的方法,有助于开发一种机器学习算法,该算法可解码用户的意图,并将其转变为特定的神经信号模式,最后通过计算机的转换以指导手臂运动。随着 Chmielewski 在脑机接口上进行更多的训练,该算法“学习”他的想法,然后移动手臂,最终会变得越来越熟练。
除了控制义肢,团队还设想,MEA 还应当可以让参与者使用神经信号来控制计算机上的光标或向智能家居设置、提供指令。
双边植入 模拟触感
尽管控制瘫痪肢体对于瘫痪者来说是一项开创性的工作,但这只能解决一半的问题。如果没有感觉的反馈,参与者控制的,实际上只是两只麻木的手臂。没有感官反馈,参与者很难使用正确的力量来拿起杯子,因此,触感可以让参与者无需看手臂就能知道手臂的位置。
和其它脑机接口不同的是,该团队不仅构建了一种可以读取神经信号并将其转化为运动的解码器,还最先在大脑两个半球植入 MEA ,使参与者在独立控制左右机械臂的同时,还能感知双手的触感。
该团队将 MEA 植入到参与者的感觉皮层中的目的,就是模拟感觉,以便在触摸假肢时,参与者将能够感觉到触碰,并精确定位其位置。
当参与者想要移动手臂时,神经信号从他的大脑传播到计算机,再到假肢。当假肢手指触摸到某物时,微小的传感器会将信息发送回他的大脑。对于参与者而言,即使信号反方向流动,他的感觉依旧像是他在用真正的手触摸某物。
在一次采访中,Chmielewski 表示:“他们(手臂)接触的地方变化时,我会有不同的感觉。” “压力变化的范围,从像有人在握住你的手,到细砂纸摩擦手指。”
“我们的最终目标是使诸如饮食之类的活动容易完成,让机器人完成一部分工作,并让参与者负责细节:吃什么、在哪里切、切多大块。”专门从事人机协作的 APL 高级机器人专家 Handelman 解释道,“通过将脑机接口信号与机器人技术、人工智能相结合,我们可以使人类专注于其它更加的重要事情中去。”
APL 神经科学家 Tenore 则表示,下一步,这项工作将不仅要增加参与者可以通过人机协作展示的日常生活活动的数量和类型,“此外,在执行这些任务时为他提供更多的感官反馈,这样他就不必完全依靠视觉来知道他是否成功”。
原文标题:美国瘫痪患者用“大脑意念”使用双机械臂吃蛋糕
文章出处:【微信公众号:DeepTech深科技】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
信号
+关注
关注
11文章
2811浏览量
77187
原文标题:美国瘫痪患者用“大脑意念”使用双机械臂吃蛋糕
文章出处:【微信号:deeptechchina,微信公众号:deeptechchina】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
如何使用PLC控制myCobot 320机械臂

使用myCobot 280机械臂结合ROS2系统搭建机械分拣站

深度解析!RK3568 加持机械臂是如何实现颜色识别与抓取的?

RK3568国产实验箱+人工智能机械臂:跳舞、叠罗汉、夹方块、积木搬运案例全解!
马斯克Neuralink启动脑机接口控制机械臂试验
机械臂的高效运作,连接器起关键作用
OrangePi AIpro应用:机械臂应用开发指南

工业机器人和机械臂的设计、功能和应用有哪些区别?
奥比中光推出2.0版大模型机械臂
大象机器人开源协作机械臂机械臂接入GPT4o大模型!

国产Cortex-A55人工智能教学实验箱_基于Python机械臂跳舞实验案例分享
基于六维力传感器的机械臂自动装配应用

Neuralink助力瘫痪患者重获数字世界自然交互体验
机械臂技术的前沿探索:年度案例回顾!






 工商网监
工商网监
评论