 如何使用KUKA机器人KLI网络分析?
如何使用KUKA机器人KLI网络分析?
库卡线路接口 (KUKA Line Interface,KLI)
KLI 是用于耦联主控层面的接口, 它将外置输入 / 输出端与 IT 连接装置组合成一体, 并且可与一个工业以太网转换器及 / 或一个客户网络以太网转换器相连接。
KLI 始终与 VxWorks 侧进行通讯。与 Windows 只可通过选定的端口才能连接,具体端口已在 KSS 8.x 出厂时预设完毕。这种连接可通过存档功能、文件共享功能、远程桌面协议或WorkVisual 来建立。
KLIconfig.XML 存储文件存储的内容
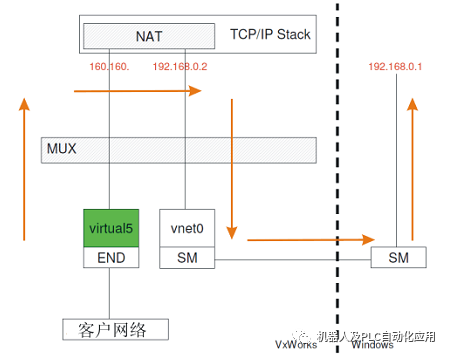
KLI :KUKA Line Interface (库卡线路接口).
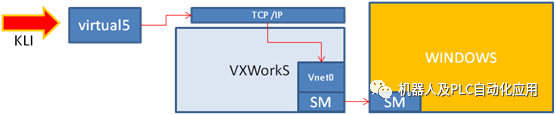
SM:共享存储的驱动程序,VxWork 和 Windows 之间的虚拟网络接口
vnet0:VxWorks 逻辑虚拟接口至 Windows 层面
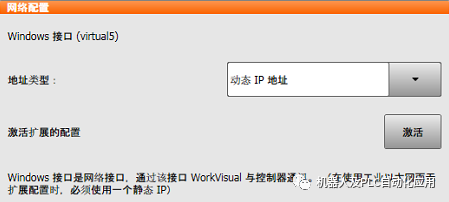
virtual 5(虚拟接口):VLAN 5 通过 KLI 接口
KLI 的运作方法有两种:
用一个静态 IP 地址
用一个动态 IP 地址
注意:
如已将虚拟网络 virtual5 设定为 DHCP,则无法进行工业以太网通讯。PROFINET 通讯 仅可通过 virtual5 实现。
KUKA的系统WINDOWSTCP/IP地址192.168.0.1 和VxWork的TCP/IP地址192.168.0.2
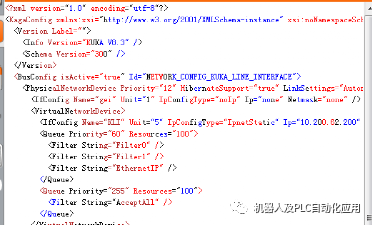
KLIconfig.xml 程序文件:
NAT:网络地址转换
虚拟网络设备
Profinet地址:10.200.27.150

虚拟网络结束
网络设置程序结束
规则:

WINDOWS将数据发送到内部端口ICMP/TCP,ICMP:Internet控制报文协议
map [GlobalNatInterface] [host:WINDOWS] ->0/32 portmap tcp/udp 18000:18999
map [GlobalNatInterface] [host:WINDOWS] ->0/32 icmpidmap icmp 19000:19999
WINDOWS将数据接收从内部TCP端口
rdr [GlobalNatInterface] [addr] port 3389 ->[host:WINDOWS] port 3389 tcp proxy RemoteIP
NAT:
rdr [GlobalNatInterface] [addr] port 139 ->[host:WINDOWS] port 139 tcp
rdr [GlobalNatInterface] [addr] port 445 ->[host:WINDOWS] port 445 tcp/udp
rdr [GlobalNatInterface] [addr] port 49001 ->[host:WINDOWS] port 49001 tcp
rdr [GlobalNatInterface] [addr] port 49002 ->[host:WINDOWS] port 49002 tcp
rdr [GlobalNatInterface] [addr] port 49003 ->[host:WINDOWS] port 49003 tcp
rdr [GlobalNatInterface] [addr] port 49004 ->[host:WINDOWS] port 49004 tcp
rdr [GlobalNatInterface] [addr] port 49006 ->[host:WINDOWS] port 49006 tcp
rdr [GlobalNatInterface] [addr] port 49010 ->[host:WINDOWS] port 49010 tcp
1.此配置页包含了所有 NAT 规则,用于在 VxWork 和 Windows 7 之间进行数据包传输。
2.这些均可根据客户需要进行调整。
3.所有的 49xxx 端口均用于与 WorkVisual 通讯。如果删除了一个端口,则相应的在线功能 (示波器)也不再可用。
程序结束
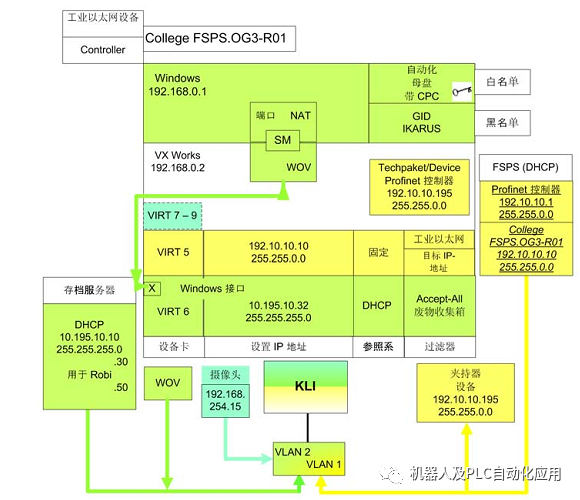
扩展机器人整体系统分析图:
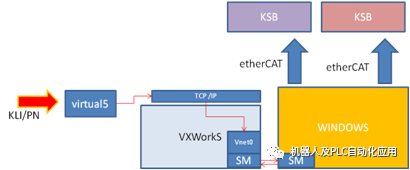
PLC 功能,用于通过 PROFINET 现场总线输入 / 输出端
F-PLC 功能,用于通过 PROFIsafe 的安全输入 / 输出端(例如紧急停机)。
KCB
KSB
控制系统与显示器通过 RDP (RDP=R emote D esktop P rotocol,远程桌面协议)而衔接。
RDP - 远程桌面协议
利用 RDP (远程桌面协议),可从某一工位远程访问一台已网络连接的电脑。屏幕内容将通过一个渐隐窗口显示到该工位里,操作人员就好像直接坐在该电脑面前一样。可利用例如鼠标和键盘等外围设备执行全套操作。如今有很多的免费的 RDP 程序可利用一个 Wizard 来简便操作。为可通过互联网建立一个安全的连接,应采用 RC4 加密算法。
微软的操作系统 Windows XP 里已备有一个远程桌面机制。
由于 KLI 在 VX-Works 里接收管理,所以 Microsoft RDP 不能凭借 KLI 在 KR C4 里使用。
Microsoft RDP 只能通过现场的控制柜 (CCU ) 服务端口 X43 而被使用。
VXWORK 系统的作用:
VxWorks 是一个具有微内核、可裁剪的高性能强实时操作系统, 在实时操作系统市场上处于领先地位。VxWorks 是由wRS(wind River Systems , Inc.)公司开发的一套具有微内核、高性能、可伸缩的实时操作系统, 支持广泛的网络通信协议, wRS 公司还提供了优秀的实时操作系统开发工具Tornado。Tornado 能够支持Windows 、Unix 等流行的工作平台和PowerPC、X86 、ARM 等几乎所有的目标处理器, 所提供的工具可用于所有目标机。除了基本的功能和开发工具外, Tornado还具有先进的系列网络产品, 极大地扩展了Tornado的网络特性, 并增强了嵌人式微处理器的网络特性。
使用TCP 进行网络通信时每个连接包括一个服务器和客户。通常情况下, 为了使用方便, 把下位机( VxWorks 端) 做为服务器, 把上位机( Windows 端) 做为客户机。
原文标题:KUKA机器人KLI网络分析-KLIconfig.XML
文章出处:【微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
机器人
+关注
关注
211文章
28418浏览量
207101 -
通信
+关注
关注
18文章
6032浏览量
135995 -
网络
+关注
关注
14文章
7565浏览量
88790
原文标题:KUKA机器人KLI网络分析-KLIconfig.XML
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论