 基于单片机和RS-485总线技术实现励磁电源控制系统的设计
基于单片机和RS-485总线技术实现励磁电源控制系统的设计

励磁调节系统是同步发电机一个十分重要的组成部分,其主要任务是向同步发电机的励磁绕组提供一个可调的直流电流或电压,从而控制机端电压的恒定,以满足发电机正常发电的需要。近年来,微机励磁调节器以其硬件结构简单、清晰、设备通用性好、标准化程度高、软件灵活、能够方便实现多种功能和满足各种控制规律的要求等优点,在许多电力工业得到了广泛的应用。但是,单微机励磁系统各环节可靠性再高,发生故障的可能仍然存在,为确保励磁系统的可靠运行,微机励磁调节器应提供网络化的可靠的通信接口,使远方的调度员或厂级工作人员能方便自如的开停机、升速升压、并网、调整功率(包括有功和无功)等操作。为此,本文采用一台工控机作为上位机,通过多个RS-485工业控制总线实现对多台励磁电源的电流预置及数据采集。使用微机励磁系统实现本地电流控制、励磁电源状态监控以及数据的采集,通过RS-485通讯口进行远程通信,从而构成了一个完整的励磁电源控制系统。
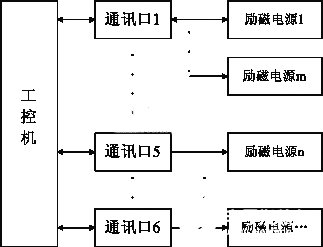
图1 控制系统结构图
根据实际需要,励磁电源控制系统的上位机采用工控机,使用了RS-485工业插卡,共有6个通讯口,而后面的多台励磁电源分配在这6个通讯口中,由工控机集中控制。下位机由单片机及其它数字电路系统组成。该系统的结构图如图1所示。
2 微机励磁系统主回路
微机励磁调节器随励磁电源运行工况的变化改变可控硅的导能控制角,从而达到自动调节发电机励磁电流的目的,保证励磁电源能输出稳定的负载电压。
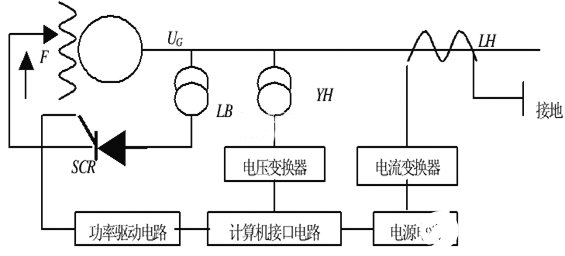
图2 励磁系统接线图
励磁系统主回路接线方式如图2所示,励磁电源取自发电机出口母线,经励磁变压器LB将发电机电压变至合适的值供整流装置整流后供给发电机转子绕组。整流电路采用三相桥式全控整流电路[1],该电路的工作特点是,既可工作于整流状态,将交流变成直流作为发电机励磁电源,也可工作于逆变状态,将直流变成交流,实现逆变灭磁,释放励磁绕组的能量,从而达到保护发电机的目的。发电机机端电压、定子电流分别经变压器YH、电流互感器变换LH变换为二次值再经A/D送至单片机,通过计算机运算后输出控制量来控制晶闸管的导通角,使电压稳定在允许范围内。
自并励励磁方式发电机端电压Ud0与励磁电压Ud之间的关系为:
![]()
其中:Xk-交流回路电抗;
ΔU—桥臂元件导通时的正向压降;
r—回路电阻。
ΔU如果忽略换相电抗和整流元件压降的影响,则机端电压与励磁电压的关系为:
![]()
由此式可知,励磁电压Ud与机端电压Ud0成正比。
3 微机励磁调节器的硬件构成

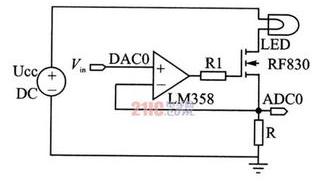
图3 励磁调节器原理图
微机励磁调节器由单片机和供电电源监控、D/A控制、A/D采集等组成,其硬件框图如图3所示。
AT89C52的I/O端口经过隔离后对励磁电源工作电源进行监控,以及对调压模块的工作电压进行控制。
系统中的D/A控制系统是励磁电源工作时调整电流的基础通道,选用了MAXIM公司的MAX536芯片。D/A控制系统需要二个通道,分别控制励磁电源电压基准和调相电压基准。
励磁电源系统的数据监控需要两路A/D。其中一路A/D通过采集励磁电源主系统中的取样电阻上的工作电压,而使主控室的控制人员能够知道每一台励磁电源的工作状态是否正常。另外一路A/D对调整管电压进行监控。A/D芯片采用MAXIM公司的MAX197多量程、12位数据采集系统(DAS)。A/D系统与D/A系统一起构成闭环控制系统,达到调节可控硅的导通角的目的。
4 微机励磁调节器的软件设计
微机励磁调节器软件采用模块化结构设计,各种功能都由相应的子程序来完成,
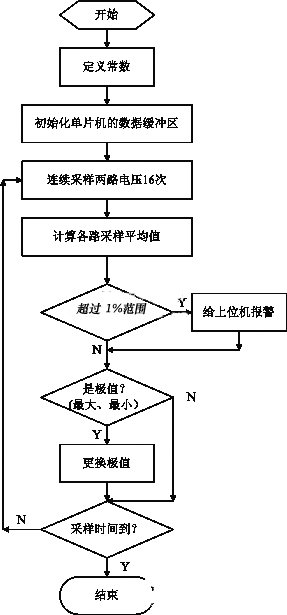
图4励磁电源加载过程程序框图
软件系统是通过上下位机分工配合实现的。下位机监测现场的工作状态,进行数据的采集和初步处理。上位机采用工业PLC作远程监控。单片机在励磁电源中担负着提供基准电压、控制调整管电压、工作数据采集、监视励磁电源工作状态以及与上位工控机进行通信、回送励磁电源工作状态及工作数据等功能。
为实现精确调节同步发电机的机端电压和控制同步发电机的无功功率,励磁调节器必须连续比较机端电压实际值与给定值,并实时改变可控硅的控制角,保证励磁电压对工况的变化做出快速反应。其流程如图4所示。
调节器上电后执行初始化和自检,初始化结束后,表明励磁调节器已经准备就绪,接着程序进入起励的设置和起励条件的判别,然后进入主程序。首先是数据采集和处理部分;主要由电机出口交流电压采样子模块、电机出口交流电流采样处理子模块和励磁电压采样处理子模块三部分组成。然后进入功率因数测算模块和PID调节模块;其中,采用数字滤波的方式求得功率因数cosφ,再通过PID调节计算出可控硅的导通角。
由于励磁控制系统比较复杂,需要测量的量比较多,因此该系统电压及电流的采集,使用直流采样法和数字PID控制调节法。PID调节计算根据采集的数据结果与额定值进行比较,从而进行PID调节计算出可控硅的触发角α;PID算法采用了一种智能受模态控制规律,根据系统偏差信号的大小、方向及变化趋势做出相应的决策,以选择适当的控制模式进行控制,具有良好的适应能力和极强的鲁棒性。频率的测量是把输入的波形通过运放变成一个方波,该方波通过二极管削去负半部分,最后进入单片机的高速输入口。
在工作数据采集中,为了消除一次采集过程中可能受到的随机干扰的影响,采用了取平均值的方法。这样经过6秒的采集过程以后,在单片机的数据缓冲器中便存放了该电源此次工作时的最大和最小有效值,使工控机以后可以查寻。工作时的数据采集流程如图5所示。
5 抗干扰设计

图5励磁电源数据采集过程程序框图
由于系统的单片机及其它数字电路系统与其他的模拟高电压、大电流的器件共同放在一个机箱中,系统的工作环境是比较恶劣和复杂的,其应用的可靠性、安全性就成为一个非常突出的问题。为保证测控系统长期、稳定、可靠的运行,现就影响测控系统可靠、安全运行的主要因素和解决方法说明如下。
5.1 数据采集误差加大
干扰侵入测量单元模拟信号的输入通道叠加在有用信号之上,会使数据采集误差加大,由于系统的测量精度较高,干扰显得更加严重。
针对此问题,从硬件和软件两方面进行考虑和解决。①硬件方面:在集成电路及采集通道上使用电容,以减少电源的干扰;其次,信号的采集连接线使用屏蔽线,使采集信号在传送过程中不会受到外界的干扰。②软件方面:采用数字滤波法,由于系统的干扰是随机干扰,且被测参数变化较慢,可以用数字滤波(就是通过一定的软件程序降低干扰信号)的方法加以抑制或滤除。
5.2 控制状态失灵与程序运行失常处理
控制状态失灵与程序运行失常主要采用了以下方法:①系统采用浮地设计;②使用软件拦截技术(指令冗余,软件陷阱);③单片机采用电源监视及“看门狗”电路;④对数字电路进行屏蔽;⑤负载输出隔离。
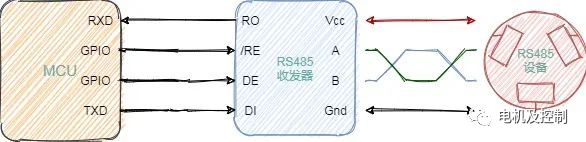
在整个系统中,单片机与外界功率开关器件采用隔离驱动方式,隔离电路模块将控制电路模块、主励磁电路模块互相隔离。这样进行设计主要是避免引起灾难性的后果。虽然隔离驱动可分为电磁隔离和光电隔离两种方式,由于本文所需产生的励磁频率低频在4Hz,高频在100Hz左右,对于光电隔离共模抑制能力差,传输速度慢的缺点不重要;同时由于光电隔离具有体积小,结构简单等优点,而且可以减少干扰,所以本系统采用光电隔离方式。隔离元件采用TLP521光电耦,与光电耦相连的单片机的两个引脚的PWM波形通过两个470Ω的电阻分别与两个光电耦相连,同时控制单片机的两个引脚交互输出高低电平,从而使得在励磁线圈上得到正反双向电压。周而复始,在励磁线圈上产生与单片机相应引脚上相同频率的波形,只是幅度不一样而已。同时在下位机中专设了延时0.01ms的程序进行软件延时,目的是为了更进一步保证功率管在工作时不会发生重叠导通以造成损坏,增加可靠性。
6 结束语
本文详细介绍了基于工控机和单片机的具有网络化控制功能的励磁调节器系统,实现了调度员或厂级工作人员能够远程控制系统的开停机、升速升压、并网、调整功率(包括有功和无功)等操作。
本文作者创新点是:讨论了基于上位机(PLC)和下位机(AT89C52单片机)串行通讯来实现励磁调节器调节的工作原理和方法,并给出了上位机和下位机的程序结构。经实践证明,在励磁电源的现场实际调试及使用中达到了预期的效果,该系统能够长期稳定、可靠的运行。
责任编辑:gt
-
电源
+关注
关注
185文章
19028浏览量
264880 -
接口
+关注
关注
33文章
9623浏览量
157726 -
发电机
+关注
关注
26文章
1729浏览量
71767
发布评论请先 登录
采用CAN总线与RS-485实现DSP通信接口
怎么实现基于RS-485总线的远程测控系统的设计?
3个理由了解为什么CAN总线与RS-485更好
基于RS-485总线的温室环境控制系统研制
RS-485智能串行通信接口的设计
基于RS-485总线的LED夜景照明控制系统设计
基于RS-485总线实现智能断路器控制系统的设计

RS-485总线之收发器与数据链路基础知识介绍



评论