 一种机器人的仿真处理方法及装置
一种机器人的仿真处理方法及装置
近日,珠海格力电器股份有限公司公开多条机器人相关专利信息,专利名称分别为“机器人的仿真处理方法及装置”、“时钟同步方法、机器人控制系统和机器人”、“关节臂结构、机器人”。
首先来看第一项专利“机器人的仿真处理方法及装置”,2020年10月13日申请,2021年1月22日公开,公开号为CN112247989A。
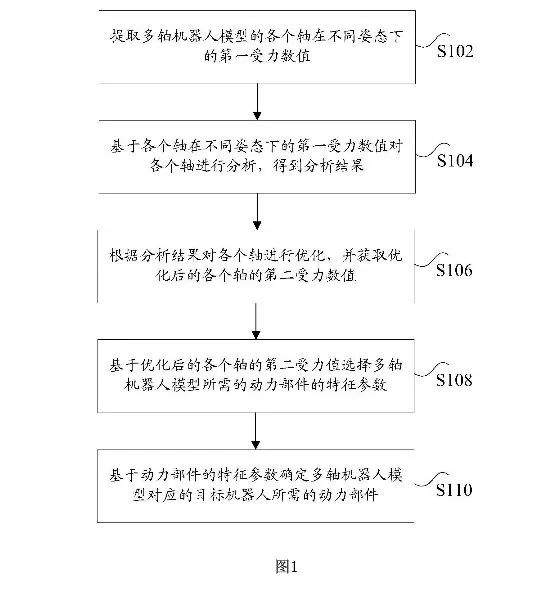
根据专利摘要,本发明公开了一种机器人的仿真处理方法及装置。其中,该方法包括:提取多轴机器人模型的各个轴在不同姿态下的第一受力数值;基于各个轴在不同姿态下的第一受力数值对各个轴进行分析,得到分析结果;根据分析结果对各个轴进行优化,并获取优化后的各个轴的第二受力数值;基于优化后的各个轴的第二受力值选择多轴机器人模型所需的动力部件的特征参数;基于动力部件的特征参数确定多轴机器人模型对应的目标机器人所需的动力部件。
本发明解决了相关技术中无法对多轴机器人的各个关节的关节载荷进行计算,导致的无法合理地对机器人的电机、减速机等部件进行选型的技术问题。
第二项专利“时钟同步方法、机器人控制系统和机器人”,2020年9月21日申请,2021年1月22日公开,公开号为CN112247985A。
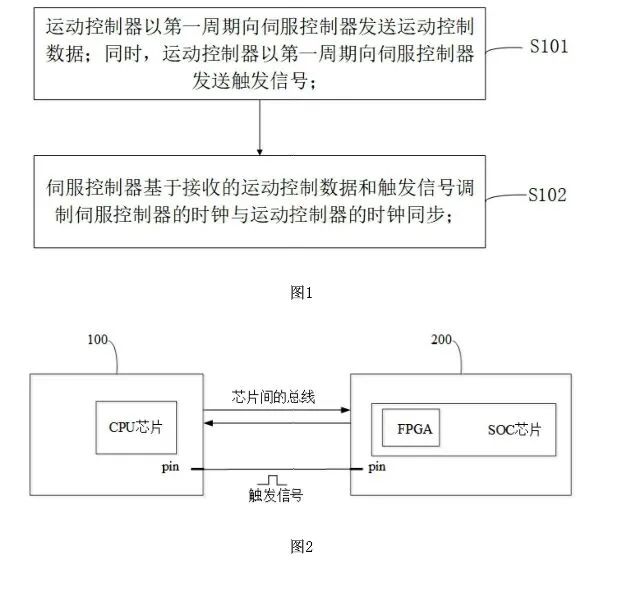
根据专利摘要,本发明涉及机器人控制技术领域,公开了一种时钟同步方法、机器人控制系统和机器人。其中,时钟同步方法应用于机器人控制系统,包括:运动控制器以第一周期向伺服控制器发送运动控制数据;同时,运动控制器以第一周期向伺服控制器发送触发信号;伺服控制器基于接收的运动控制数据和触发信号调制伺服控制器的时钟与运动控制器的时钟同步。满足了时钟同步的实时性,从而极大地降低了机器人在高速运行过程中的速度波动或抖动,提升了机器人在高速下运行的轨迹精度,最终提高了控制器在高带宽响应下的整体控制性能。
第三项专利“关节臂结构、机器人”,2020年9月10日申请,2021年1月22日公开,公开号为CN112248028A。
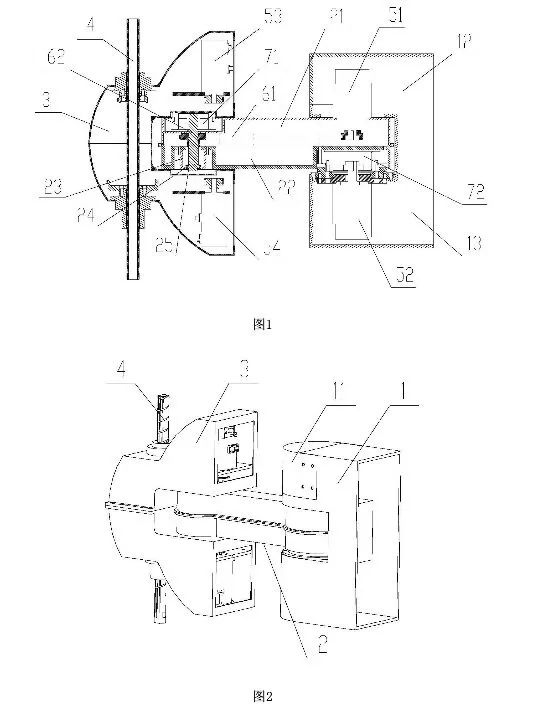
根据专利摘要,本申请提供一种关节臂结构、机器人,包括第一关节臂、第二关节臂、第一电机和传动部,所述第二关节臂能够转动地设置在所述第一关节臂上,所述第一电机设置在所述第二关节臂外,所述第一电机通过所述传动部带动所述第二关节臂在所述第一关节臂上转动。
本申请提供一种关节臂结构、机器人,能够减少关节臂结构末端的惯量,提高关节臂结构的相应速度。
责任编辑:lq
-
控制系统
+关注
关注
41文章
6630浏览量
110658 -
机器人
+关注
关注
211文章
28468浏览量
207356 -
电机
+关注
关注
142文章
9028浏览量
145666
原文标题:格力公开3项机器人相关专利 涉及关节臂结构、时钟同步方法等
文章出处:【微信号:tjrobot,微信公众号:天津机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论