 研究人员从瓢虫翅膀得到灵感,设计出一款柔性可折叠机器人
研究人员从瓢虫翅膀得到灵感,设计出一款柔性可折叠机器人

智东西1月12日消息,近日,韩国首尔大学的研究人员从瓢虫翅膀得到灵感,设计出一款柔性可折叠机器人。
折叠可以使机器人结构紧凑、重量变轻,许多研究者都曾做过类似研究。在减震机构、机车机械手等结构中,可折叠设计也十分常见。但是,传统设计中,可折叠机械结构的每个表面都是不可变形的刚性面,难以储存能量和实现稳健的自锁。
首尔大学的研究克服了这一局限性。
这项研究已经发表在《科学·机器人学(Science Robotics)》期刊上,论文题目为《从瓢虫得到启发的柔性折叠(Ladybird beetle–inspired compliant origami)》
一、瓢虫翅膀:利用翼脉实现弹性储能和自锁
对于飞行动物来说,翅膀十分重要。在发生极端环境变化时或捕食者逼近时,它们需要快速展开翅膀逃离危险。
在这一过程中,翅膀快速展开的能力和承载能力缺一不可。翅膀的快速展开能力可以保证动物迅速动作;承载能力则可以保证飞行的稳定性,防止翅膀受空气动力影响而失效。
鸟类利用翅膀上的肌肉和骨骼来保证快速展开能力和承载能力。但是,瓢虫的翅膀却十分奇特。
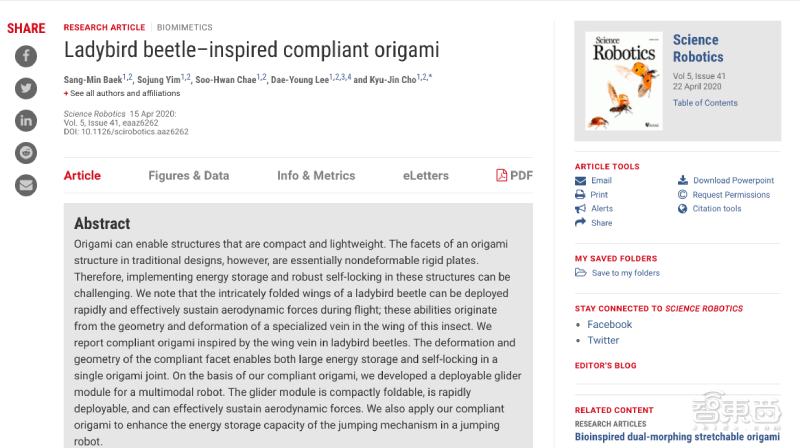
瓢虫的翅膀是没有骨头和肌肉的膜状翅膀,却可以在100毫秒内快速展开,还能在高频扇动时维持有效的空气动力。
研究人员发现,这是因为瓢虫翅膀上特殊的翼脉。瓢虫的翅膀上有带式弹簧(tapespring)形状的翼脉,翼脉的横截面曲率和柔性使其翅膀既能弹性储能,也具有自锁能力。
在翅膀处于折叠状态时,横截面曲率使翼脉产生了较高的初始刚度,也保证了翅膀的自锁。同时,在翅膀折叠过程中,大量的能量被储存在翼脉中。
这一点给了研究人员启发:可以利用柔性材料实现机械的储能、自锁功能。
二、可折叠结构:116ms内快速展开,可承重自身的150倍
借鉴瓢虫翅膀翼脉的折叠方式,研究人员设计出了一个柔性可折叠机构。
首先,研究人员改变了以往可折叠结构每个面都是刚性面的特点,选用了两种不同材料进行制作。
在折叠和展开时,材料弯曲部分的应变更大。因此,材料弯曲部分采用了防撕裂织物材料,材料平面部分采用聚对苯二甲酸乙二醇酯(PET)材料制作。防撕裂织物材料的柔性比PET材料大100倍,具备与瓢虫翅膀翼脉相似的横截面曲率。
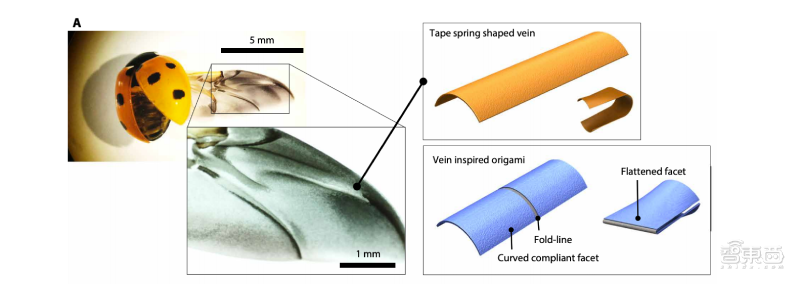
▲可折叠结构材料示意
为了生产出曲面,研究人员在热层压步骤中使用了预先设计好的模具。
▲热层压步骤
在柔性折叠的过程中,靠近折叠线的弯曲面逐渐变平,弹性势能储存在变形的面上。储存的弹性势能使机翼能够在116毫秒内快速展开。
▲弹性势能转化过程
另外,机翼面的弯曲形状赋予了柔性折叠结构自锁能力。设计出的柔性折叠结构可以承重其自身重量的150倍(约为210g,45mm力臂)。
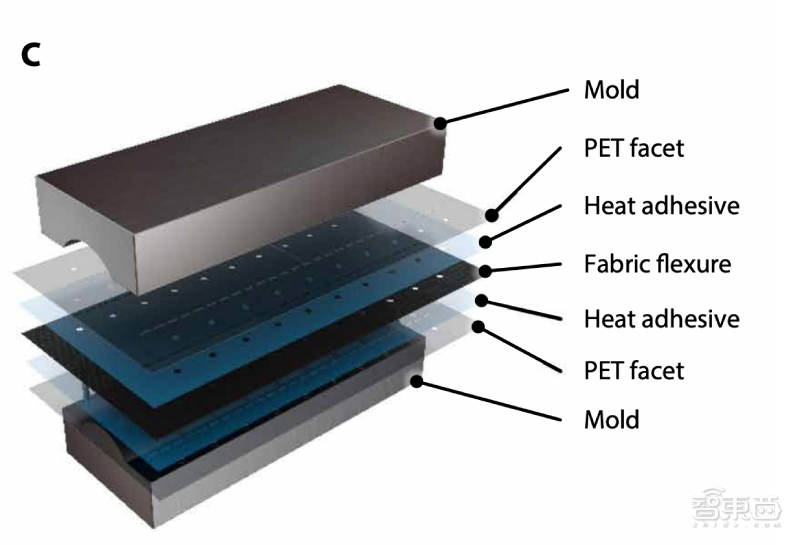
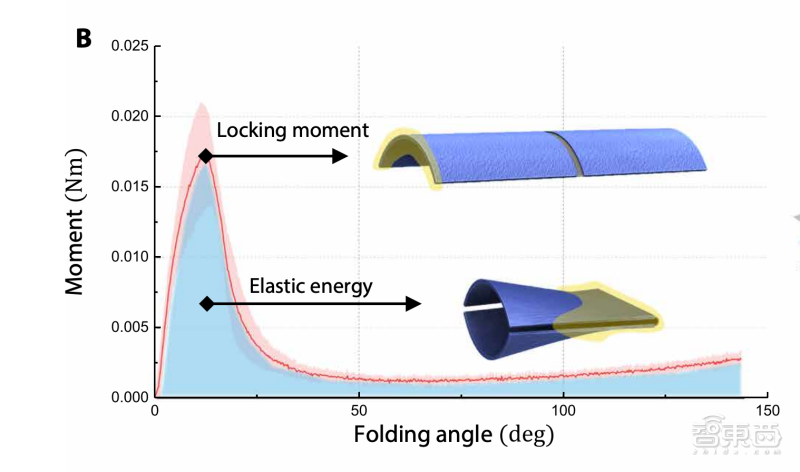
为了进一步验证该柔性可折叠机构的性能,研究人员测量了折叠角度,绘制出折叠力矩图,又根据力矩图绘制了储存的能量图。
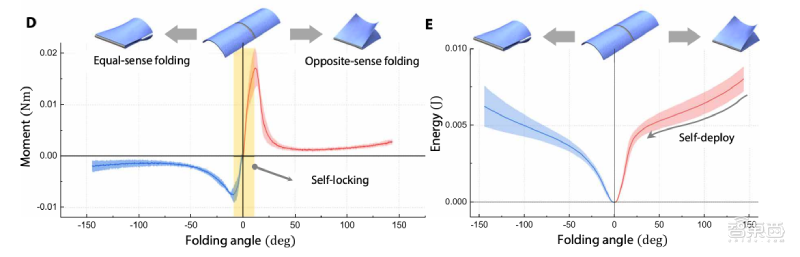
▲左:折叠力矩;右:储存的势能
图像显示,折叠力矩具有各向异性力矩投影,两个峰值折叠力矩呈现自锁。柔性折叠机构在不同的折叠角度下储存不同的能量。
三、成功应用于滑翔机
研究人员将柔性折叠机构应用于一个滑翔机器人,并进行了试飞。
视频第57秒可以看到,研究人员从3楼释放机器人,机器人快速展开机翼,经过滑翔后平稳落地。
视频第1分45秒开始的拍打飞行实验中,研究人员从一个平台上释放机器人,机器人快速拍打机翼,维持了较好的空气动力,成功飞到对面平台上。
研究人员还在有风条件下做了实验。视频第1分54秒可以看到,机器人能保持较稳定的滑翔状态,这说明机翼具有较好的承载能力。
实验证明,将柔性可折叠机构应用于滑翔机能实现较理想的滑翔性能。
结语:柔性可折叠机器人研究新方向
韩国首尔大学研究人员借鉴了瓢虫翅膀的折叠方式,研究出一款可快速展开、具备自锁功能、能储存大量弹性势能的柔性可折叠机构,并成功将其应用于一个滑翔机器人,为之后的柔性可折叠机器人研究指明了新方向。
论文中还指出,目前这种新型柔性可折叠机器人受到材料的限制,研究人员将在未来进行更深入研究。
责任编辑:lq
-
机器人
+关注
关注
213文章
31393浏览量
223553 -
可折叠
+关注
关注
0文章
70浏览量
6451
原文标题:科学家参透瓢虫翅膀“玄机”,造新型柔性可折叠机器人
文章出处:【微信号:tjrobot,微信公众号:天津机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
一款油墨覆盖0-1000N,为机器人、智能穿戴与医疗传感赋能

广州团队研制出机器人“触觉皮肤”
从折叠屏、机器人手机到人形机器人,荣耀MWC2026三箭齐发

再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
如何在NVIDIA Isaac Lab中使用Newton训练四足机器人

最新发布!泰科机器人发布首款自研双足人形机器人

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
工业机器人的特点
折叠机数据采集物联网解决方案

中国科学院沈阳自动化研究所:研究基于石墨烯/PDMS封装的医用胶带柔性传感器,用于水下机器人运动检测

高压放大器在软体机器人研究中的应用




评论