 有关顺控程序的基本知识
有关顺控程序的基本知识
GRAPH 编程语言
① 导航视图
② 导航工具栏
③ 工作区
GRAPH 是一种创建顺序控制系统的图形编程语言。使用顺控程序,可以更为快速便捷和直观地对顺序进行编程。通过将过程分解为多个步,而且每个步都有明确的功能范围,然后再将这些步并组织到顺控程序中。在各个步中定义待执行的动作,以及步之间的转换条件。这些转换条件包括切换到下一步的条件。
顺序控制系统的模块
顺序控制系统可通过预定义的顺序对过程进行控制,并受某些条件的限制。顺序控制系统的复杂度取决于自动化任务。在顺序控制系统中,至少包含三个块。
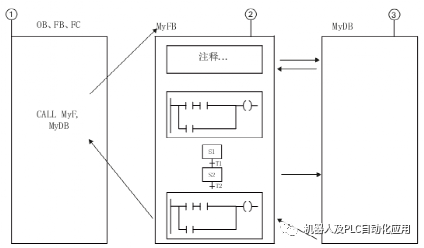
① 调用块
② GRAPH 函数块
③ 背景数据块
● GRAPH 函数块
在GRAPH 函数块中,可以定义一个或多个顺控程序中的单个步和顺序控制系统的转换条件。
● 背景数据块
背景数据块中包含顺序控制系统的数据和参数。可以将背景数据块分配给 GRAPH 函数块,并由系统自动生成。
● 调用代码块
要在循环中执行 GRAPH 函数块,则必须从较高级的代码块中调用该函数块。该块可以是一个组织块 (OB)、函数 (FC) 或其它函数块 (FB)。通常将 GRAPH 函数块调用为一个单背景。
GRAPH 函数块的周期取决于调用块的周期。在每个周期,都会先执行 GRAPH 函数块中的
前永久指令。然后再处理活动步中的动作。最后再执行后永久指令。
有关顺控程序的基本知识
在 GRAPH 函数块中,可以按照顺控程序的格式编写程序。 顺控程序既可以处理多个独立任务,也可以将一个复杂任务分解成多个顺控程序。 如果顺控程序处理多个独立任务,则这些顺控程序将在程序流中并行处理。 如果使用多个顺控程序将一个复杂任务分解成更小部分,则必须将相关的顺控程序与程序跳转相关联。
可以将程序划分为顺控程序中的各个步。 在最简单的情况下,各个步将以线性方式逐个处理。 但也可使用选择分支或并行分支,创建结构更为复杂的顺控程序。 程序将始终从定义为初始步的步开始执行。 一个顺控程序可以有一个或多个初始步。 初始步可以在顺控程序中的任何位置。
激活一个步时,将执行该步中的动作。 也可以同时激活多个步,例如在并行分支中。 激活一个步时,将经常检查以下转换条件。 一旦满足所有条件而且没有未决监控错误时,转换条件会立即切换到下一步。 该步将变成活动步。 结束顺控程序时,可使用跳转或顺序结尾。 跳转目标可以是同一顺控程序中的任意步,也可以使其它顺控程序中的任意步。 这样,可以支持顺控程序的循环执行。
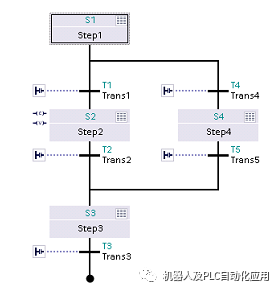
并行分支:
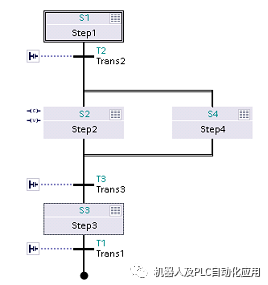
选择分支:
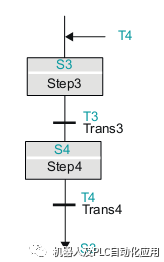
跳转到步:
顺序结尾:
可以使用“顺序结尾”元素结束顺控程序或分支的执行。该元素将终止顺控程序或分支的执行。在并行分支中,顺序结尾前必须有一个转换条件。“顺序结尾”元素在顺控程序中以黑点表示。
有关动作的基本知识:
可在步中对动作进行编程。 例如,这些动作可控制输入或输出,激活或禁用顺控程序的其它步,或者调用块。 因此,动作中可包含过程控制的相关指令。
① 互锁条件
② 可选事件
③ 标识符
④ 操作数、赋值或块调用
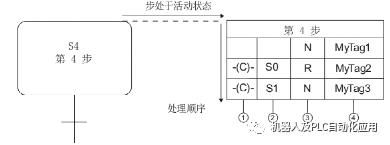
标准动作:
N - 只要激活步,就立即置位.
只要激活该步,操作数的信号状态即为“1”。
只要激活该步,将立即调用所指定的块。
该步在发生 S1 事件的周期中也视为激活。
S - 置位为 1
只要激活该步,则立即将操作数置位为“1”并保持为“1”。
R - 置位为 0
只要激活该步,则立即将操作数置位为“0”并保持为“0”。
D - 接通延时
在激活该步 n 秒之后,将操作数置位为“1”并在步激活的持续时间内保持为“1”。 如果步激活的持续时间小于 n 秒,则不适用。可以将时间指定为一个常量,或指定为一个 TIME/DWORD 数据类型的 PLC 变量。
L - 在设定时间内置位
激活该步时,则操作数将置位为“1”n 秒时间。 之后将复位该操作数。 如果步激活的持续时间小于 n 秒,则操作数也会复位。可以将时间指定为一个常量,或指定为一个 TIME/DWORD 数据类型的 PLC 变量。
事件型动作
可以选择将动作与事件相关联,根据一定条件执行动作。 带有标识符为“D”、“L”和“TF”的动作无法与事件相关联。如果将动作与事件相关联,则会通过边沿检测功能检测事件的信号状态。 这意味着,只能在发生事件的周期内才能执行指该令。
S1 上升沿 步已激活(信号状态为“1”)
S0 下降沿 步已取消激活(信号状态为“0”)
V1 上升沿 满足监控条件,即发生错误(信号状态为“1”)
V0 下降沿 不再满足监控条件,即错误已消除(信号状态为“0”)
L0 上升沿 满足互锁条件,即错误已消除(信号状态为“1”)
L1 下降沿 不满足互锁条件,即发生错误(信号状态为“0”)
A1 上升沿 报警已确认。
R1 上升沿 到达的注册。
可以使用事件的信号状态编写其它动作。 这样,不但可以监控和影响各个步,也可以监控
和影响整个顺序控制系统。
使用标识符“ON”(激活步)和“OFF”(取消激活步)的动作必须始终与事件相关联。 事件将确定步的激活或取消激活时间。如果在同一个周期内既有激活步也有取消激活步,则取消激活操作的优先级更高。
也可以将使用“S1”、“V1”、“A1”或“R1”事件的动作与互锁条件相关联。 因此,只有在满足互锁条件时,才执行这些动作。
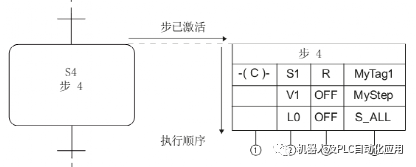
只要“Step4”步变为活动状态且满足互锁条件后,则“MyTag1”将置位为“0”并保持为“0”。 如果发生监控错误,则将取消激活“MyStep”步。 如果发生互锁错误,则将取消激活所有步。
责任编辑:lq
-
模块
+关注
关注
7文章
2716浏览量
47526 -
控制系统
+关注
关注
41文章
6628浏览量
110646 -
编程语言
+关注
关注
10文章
1945浏览量
34771
原文标题:STEP7-V16 -GRAPH 编程语言-1基础
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
腾讯ima升级知识库功能,上线小程序实现共享与便捷问答
顺丰科技与华为签署战略合作协议
IGB基本知识汇总
航顺HK32MCU在电机行业应用与布局

顺络压敏电阻在电路保护中的应用
堆栈和内存的基本知识
光刻工艺的基本知识

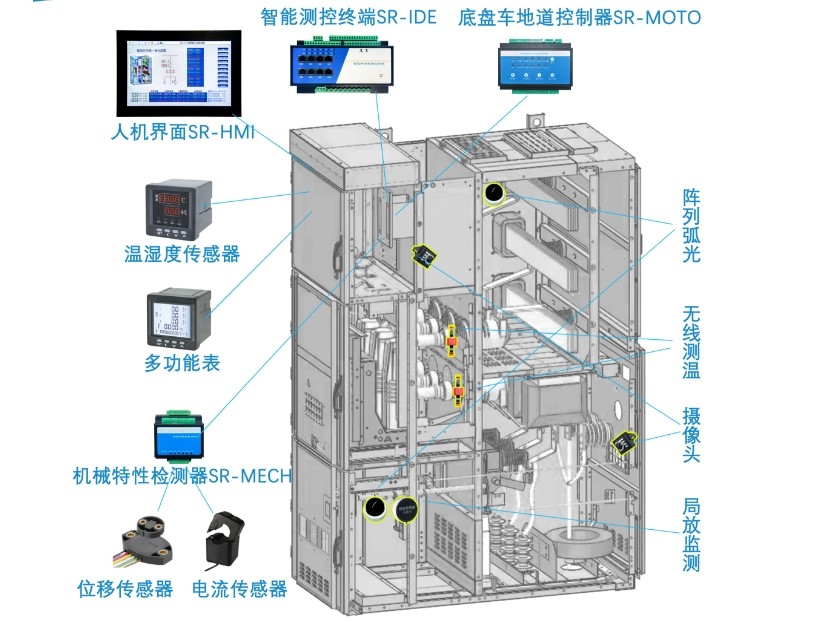
变电站一键顺控系统和开关柜一键顺控有区别吗?
航顺芯片亮相CICD年会主论坛
年报速递!顺络电子2023表现如何?

开关柜的基本知识
西门子博途中顺控器的使用指令





 工商网监
工商网监
评论