 香港大学实现机器人触觉传感器的自解耦和超分辨率
香港大学实现机器人触觉传感器的自解耦和超分辨率
机器人在日常生活中无处不在,尤其是新冠肺炎爆发期间,机器人在无接触配送、紫外线消毒以及防疫应急处理和辅助作业等方面,都扮演了重要角色,也让人们看到机器人在医疗领域的潜力无限。
香港城市大学生物医学工程系申亚京教授课题组、香港大学计算机系潘佳教授课题组及其合作者,共同提出了一种基于磁性薄膜、类人类皮肤功能的触觉传感器,结合深度学习算法,实现了机器人触觉传感器的自解耦和超分辨率,为仿人类皮肤的触觉感知提供了新的思路,也再一次刷新了我们对机器人的新认知。
作为人类最大的器官,皮肤可以感知力的大小和方向,帮助人类完成非常精巧和复杂的任务,比如抓取易碎物品,进行灵巧操作,但现有的工业机器人触觉传感器与人类皮肤相比还存在较大差距。
相关成果以 “Soft magnetic skin for super-resolution tactile sensing with force self-decoupling” 为题,于近日发表在《科学机器人》(Science Robotics)上。这一研究将帮助机器人更好地完成自适应抓取、灵巧操作,可用于人机交互,模式识别等重要领域,赋予机器人灵巧操作日常物品的能力,提高人机交互的安全性。”
触觉传感器适用于机器人中模仿触觉功能的传感器,可以赋予机器人通过接触来感知外部环境并与之交互的能力,在机器人灵巧操作、人机共融、模式识别等领域有着重要的应用。
随着微电子技术的发展和各种有机材料的出现,科学家已经提出了多种多样的触觉传感器的研制方案,近年来,由于磁性材料可以对变化磁场作出快速响应的特性,已经机器人领域得到了重要应用。
去年 11 月,由申亚京教授课题组、中国科学院深圳先进技术研究院(SIAT)领衔的科研团队,通过使用一种名为 M-spray 的复合胶状磁性喷雾剂(composited glue-like magnetic spray),成功开发出一种制造毫米级机器人(Millirobots)的简单方法。只需要将类似胶水的磁性喷雾剂喷在物体表面,就可以快速制造出一种运动可控且灵活的毫米级机器人。利用这种方法,在磁场的驱动下,被涂抹后的物体可以在不同表面上爬行、行走或滚动,成功在兔胃内实现在目标位置释放药物。
在本次研究中,研究人员也同样使用了一种磁性材料,拥有可编程性,可远程操控性等优点,在微型机器人中应用十分广泛,可用于体内药物递送,血管舒通等重要领域。针对磁膜的特性设计深度学习方法,将其超分辨率提高到了 60 倍,达到了与人类皮肤的超分辨率(约 40 倍)可比的程度。这对未来把人工皮肤覆盖于机器人全身,使机器人拥有和人类一样的全身触觉感知能力至关重要。”
随着该研究的发展,机器人表面触觉将获得新一轮提高,或许,工业机器人、协作机器人等也将随着触觉感知的发展迎来新的可能。
原文标题:新型磁性触觉皮肤,机器人可穿针引线夹鸡蛋,触觉传感器的新机遇
文章出处:【微信公众号:机器人在线订阅号】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
传感器
+关注
关注
2556文章
51709浏览量
758662 -
机器人
+关注
关注
212文章
28895浏览量
209579
原文标题:新型磁性触觉皮肤,机器人可穿针引线夹鸡蛋,触觉传感器的新机遇
文章出处:【微信号:im_robotic,微信公众号:机器人在线订阅号】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
仿生触觉传感器:触碰未来的科技奇迹
汉威科技柔性触觉传感器:为人形机器人装上“中国触觉”

清华大学:软体机器人柔性传感技术最新研究进展

MPS磁性位置传感器MA600在机器人中的应用
中国科大:在机器人触觉传感器研究中取得重要进展

两轮亿元融资,又一家传感器初创企业获投资!
这批中国企业,在做人形机器人触觉传感器
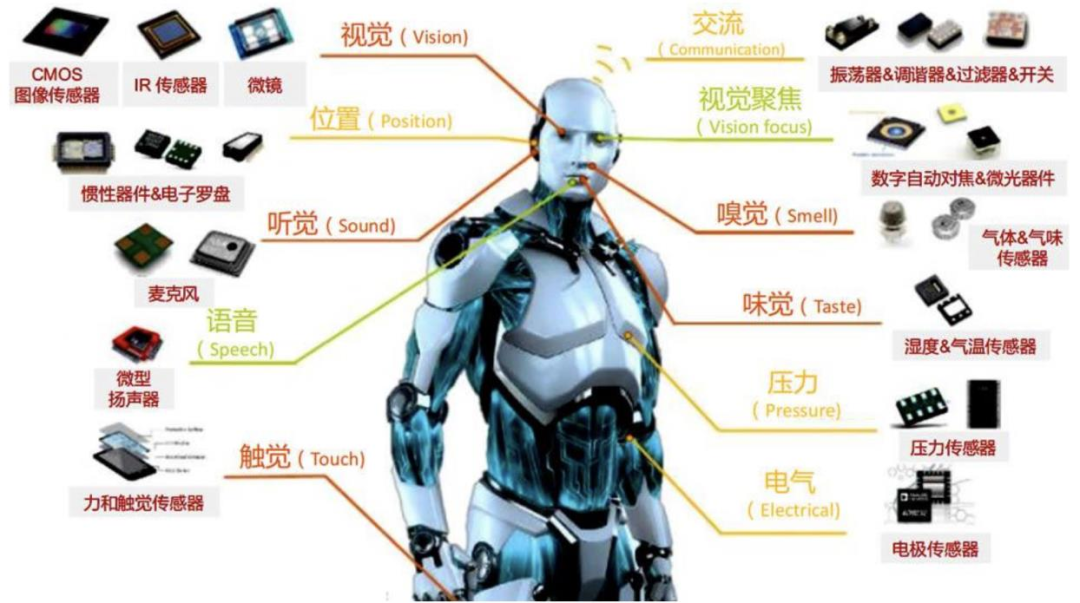
一文讲透人形机器人常用的四类感知传感器:视觉、力/力矩、触觉、IMU
触觉传感器的发展,对机器人产业有什么影响?


哈尔滨工业大学/南方科技大学:聚焦离子束制备高分辨率电化学-电致发光耦合双极纳米电极阵列传感器






 工商网监
工商网监
评论