 腾讯正式推出首个软硬件全自研多模态四足机器狗Max
腾讯正式推出首个软硬件全自研多模态四足机器狗Max
3月2日,腾讯Robotics X实验室正式推出首个软硬件全自研多模态四足机器狗Max,该产品采用足轮融合一体式设计,可实现双足站立、移动、后空翻、摔倒自恢复等高难度动作。
据了解,腾讯机器狗采用了3个技术创新,首先是离合式足轮一体化机构设计方案,关节足动力源由一个重约20g的微型直线电机提供,实现了足式、轮式运动任意切换,这是Max多模态运动的基础。
其次是轮式结构,能将机器狗的运动速度提高到25公里/小时。
第三是精准的控制算法,该设备一方面延续了腾讯Robotics X实验室第一只机器狗Jamoca的鲁棒控制算法;另一方面通过创新实现了亚毫秒级力控,大大提升了Max的反应速度,确保了多模态动作得以良好实现。
目前,同类型产品中,最为知名的是波士顿动力的四足机器狗Spot,能够跳舞、巡逻、登山等,已经在部分行业中被用于巡逻员使用。
Spot凭借领先的平衡技术,因“踹不倒”长期成为机器狗领域的扛把子,该产品于2020年6月正式商业化,单台设备约50万元人民币。至2020年底,Spot获得了数百台的订单。
责任编辑:haq
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
210文章
28191浏览量
206500 -
腾讯
+关注
关注
7文章
1643浏览量
49397 -
机器狗
+关注
关注
3文章
170浏览量
10107
发布评论请先 登录
相关推荐
Arm成功将Arm KleidiAI软件库集成到腾讯自研的Angel 机器学习框架
Arm 与腾讯携手合作,成功将 Arm KleidiAI 软件库集成到腾讯自研的 Angel 机器学习框架。 借助 KleidiAI 解
“0元购”智元灵犀X1机器人,软硬件全套图纸和代码全公开!资料免费下载!
和开发指南分别上线GitHub和智元机器人官网,“一站式”开源软硬件全套图纸和代码,大幅降低了机器人技术开发的门槛,推动了全球机器人技术的普及与创新,让“人形
发表于 10-25 15:20
研华产品通过统信及兆芯通用软硬件适配互认测试
近日,研华自主研发的iEMS智慧能源、iMachine设备云智联以及InsightAPM软件通过了统信及兆芯通用软硬件适配互认测试,顺利取得了“通用软硬件适配认证中心”联合认证证书。这不仅对研
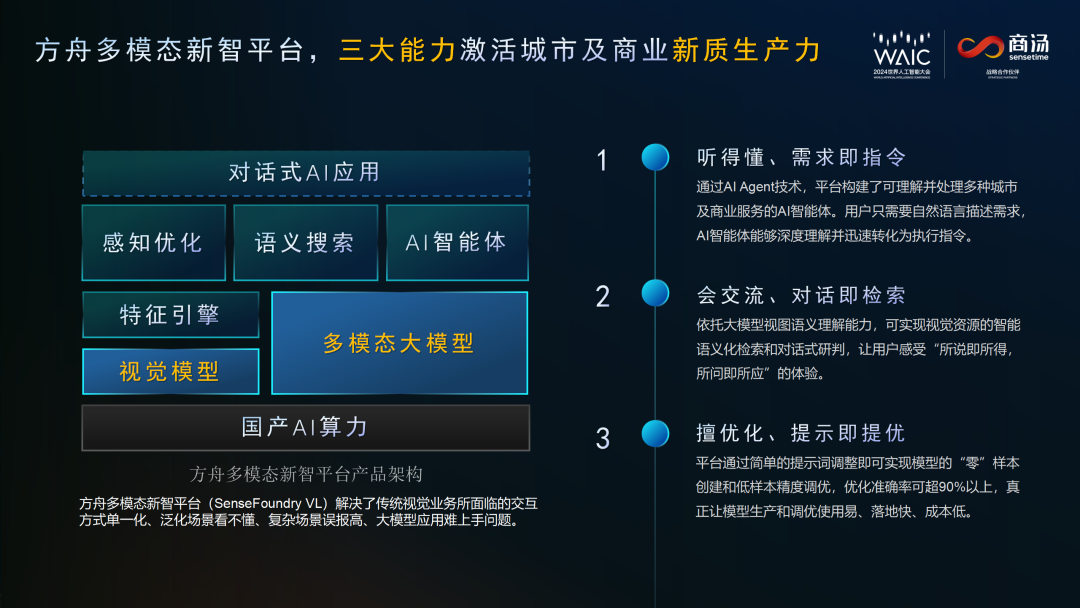
商汤科技推出SenseFoundry-VL方舟多模态新智平台
WAIC 2024期间,基于 “日日新5.5”大模型体系能力,商汤“方舟城市开放平台”进行全新产品架构升级, 推出首个“大模型+城市服务”的解决方案及应用实践「SenseFoundry-VL 方舟多模态新智平台」 ,助力智慧城市
商汤科技联合海通证券发布多模态全栈式大模型
商汤科技近日隆重推出了其最新研发的“日日新SenseNova 5.0”大模型体系,并与海通证券携手,共同发布了业内首个专为金融行业量身打造的多模态全
商汤科技与海通证券携手发布金融行业首个多模态全栈式大模型
商汤科技与海通证券联合研发并发布了金融行业内首个面向多业务场景的多模态全栈式大模型。双方计划将这一先进技术应用于智能问答、合规风控、代码辅助
商汤科技联合海通证券发布业内首个面向金融行业的多模态全栈式大模型
4月23日,商汤科技正式推出“日日新SenseNova 5.0”大模型体系,并与海通证券联合发布业内首个面向金融行业的多模态全栈式大模型。

理想汽车自研大模型Mind GPT通过国家备案
理想汽车近日宣布,其全自研的多模态认知大模型Mind GPT已正式通过国家《生成式人工智能服务管理暂行办法》备案,成为汽车行业中
传音控股旗下Infinix宣布推出首款自研电源管理芯片Cheetah X1
传音控股旗下智能手机公司Infinix Mobile日前宣布推出首款自研电源管理芯片Cheetah X1。
知行科技全栈自研iDC,向着整车中央计算机发展
知行科技设计并开发了iDCMid所有关键软硬件。其中自研的软件中间件,不依赖于任何开源框架,可以将软件部署到不同计算平台及操作系统。
发表于 12-21 14:08
•663次阅读





 工商网监
工商网监
评论