 操作系统的灵魂Linux调度系统讲解
操作系统的灵魂Linux调度系统讲解
本文主要是讲Linux的调度系统, 由于全部内容太多,分三部分来讲,调度可以说是操作系统的灵魂,为了让CPU资源利用最大化,Linux设计了一套非常精细的调度系统,对大多数场景都进行了很多优化,系统扩展性强,我们可以根据业务模型和业务场景的特点,有针对性的去进行性能优化,在保证客户网络带宽前提下,隔离客户互相之间的干扰影响,提高CPU利用率,降低单位运算成本,提高市场竞争力。欢迎大家相互交流学习!
CPU作为计算资源,一直是云计算厂商比拼的核心竞争力,我们的目标是合理安排好计算任务,充分提高CPU的利用率,预留更多空间容错,增强系统稳定性,让任务更快执行,降低无效功耗,节约成本,从而提高市场竞争力。
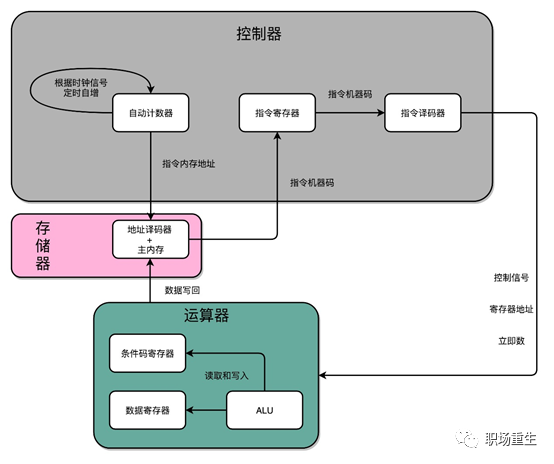
CPU 实现的抽象逻辑图
首先,我们有一个自动计数器。这个自动计数器会随着时钟主频不断地自增,来作为我们的 PC 寄存器;
在这个自动计数器的后面,我们连上一个译码器。译码器还要同时连着我们通过大量的 D 触发器组成的内存。
自动计数器会随着时钟主频不断自增,从译码器当中,找到对应的计数器所表示的内存地址,然后读取出里面的 CPU 指令。
读取出来的 CPU 指令会通过CPU 时钟的控制,写入到一个由 D 触发器组成的寄存器,也就是指令寄存器当中。
在指令寄存器后面,我们可以再跟一个译码器。这个译码器的作用不再是用于寻址,而是把拿到的指令解析成opcode 和对应的操作数。
当我们拿到对应的 opcode 和操作数,对应的输出线路就要连接 ALU,开始进行各种算术和逻辑运算。对应的计算结果,则会再写回到 D 触发器组成的寄存器或者内存当中。
这里整个过程就大概是CPU的一条指令的执行过程。为了加快CPU指令的执行速度,CPU在发展过程中做了很多优化,例如流水线,分支预测,超标量,Hyper-threading,SIMD,多级cache,NUMA架构等, 这里主要关注Linux的调度系统。
CPU上下文
Linux 是一个多任务操作系统,它支持远大于 CPU 数量的任务同时运行。当然,这些任务实际上并不是真的在同时运行,而是因为系统在很短的时间内,将 CPU 轮流分配给它们,造成多任务同时运行的错觉。
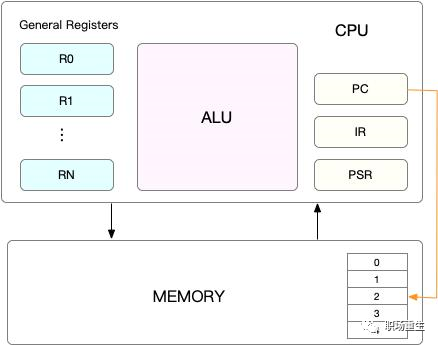
而在每个任务运行前,CPU 都需要知道任务从哪里加载、又从哪里开始运行,也就是说,需要系统事先帮它设置好 CPU 寄存器和程序计数器(Program Counter,PC)。
CPU 寄存器,是 CPU 内置的容量小、但速度极快的内存。而程序计数器,则是用来存储 CPU 正在执行的指令位置、或者即将执行的下一条指令位置。它们都是 CPU 在运行任何任务前,必须的依赖环境,因此也被叫做 CPU 上下文(执行环境):
而这些保存下来的上下文,会存储在系统内核中(堆栈),并在任务重新调度执行时再次加载进来。这样就能保证任务原来的状态不受影响,让任务看起来还是连续运行。
在Linux中,内核空间和用户空间是两种工作模式,操作系统运行在内核空间,而用户态应用程序运行在用户空间,它们代表不同的级别,而对系统资源具有不同的访问权限。
这样代码(指令)执行存在不同的CPU上下文,而进行调度的时候,要进行相应的CPU上下文切换,Linux系统存在不同堆栈来保存CPU上下文,系统中每个进程都会拥有属于自己的内核栈,而系统中每个CPU都将为中断处理准备了两个独立的中断栈,分别是hardirq栈和softirq栈:
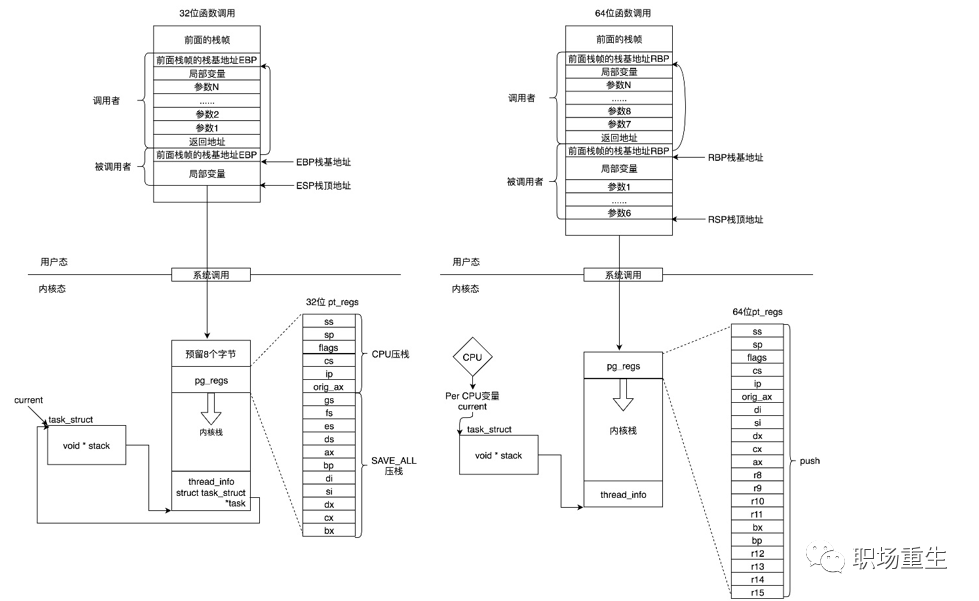
Linux系统调用CPU上下文切换堆栈结构:
中断上下文:中断代码运行于内核空间,中断上下文即运行中断代码所需要的CPU上下文环境,需要硬件传递过来的这些参数,内核需要保存的一些其他环境(主要是当前被打断执行的进程或其他中断环境),这些一般都保存在中断栈中(x86是独立的,其他可能和内核栈共享,这和具体处理架构密切相关),在中断结束后,进程仍然可以从原来的状态恢复运行。
进程上下文:进程是由内核来管理和调度的,进程的切换发生在内核态,进程的上下文不仅包括了虚拟内存、栈、全局变量等用户空间的资源,还包括了内核堆栈、寄存器等内核空间的状态。
系统调用上下文:进程可以在内核空间和用户空间运行,分别称为进程的用户态和进程的内核态, 从用户态到内核态的转变需要通过系统调用来完成,需要进行CPU上下文切换,在执行系统调用时候,需要保存用户态的CPU上下文(用户态堆栈)到内核堆栈,然后加载内核态的CPU上下文。
CPU处理器总处于以下状态中的一种:
1、内核态,运行于进程上下文,内核代表进程运行于内核空间;
2、内核态,运行于中断上下文,内核代表硬件运行于内核空间;
3、用户态,运行于用户空间。
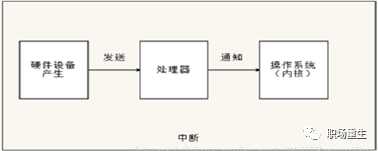
中断
中断是由硬件设备产生的,而它们从物理上说就是电信号,之后,它们通过中断控制器发送给CPU,接着CPU判断收到的中断来自于哪个硬件设备(这定义在内核中),最后,由CPU发送给内核,内核来处理中断。
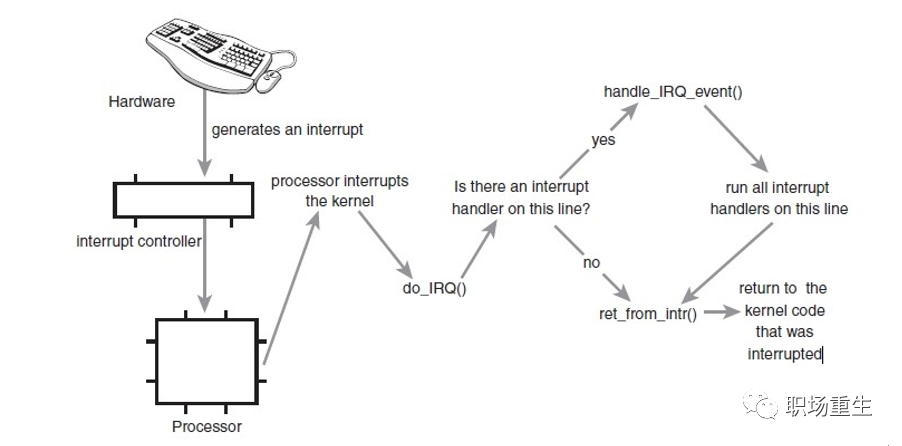
硬中断简单处理流程:
硬中断实现:中断控制器+中断服务程序
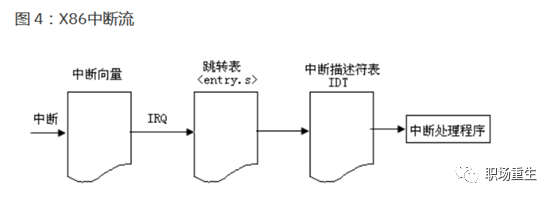
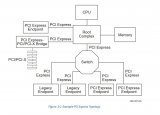
中断框架设计(x86):
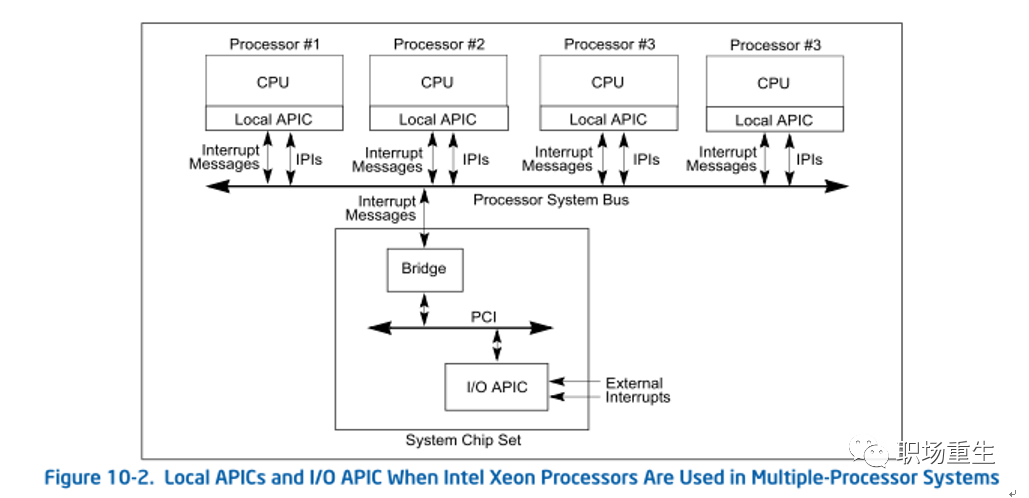
X86计算机的 CPU 为中断只提供了两条外接引脚:NMI 和 INTR。其中 NMI 是不可屏蔽中断,它通常用于电源掉电和物理存储器奇偶校验;INTR是可屏蔽中断,可以通过设置中断屏蔽位来进行中断屏蔽,它主要用于接受外部硬件的中断信号,这些信号由中断控制器传递给 CPU。当前x86 SMP架构主流都是采用多级I/O APIC(高级可编程中断控制器)中断系统。
Local APIC:主要负责传递中断信号到指定的处理器;
I/O APIC:主要是收集来自 I/O 装置的 Interrupt 信号且在当那些装置需要中断时发送信号到本地 APIC;
中断分类:
中断可分为同步(synchronous)中断和异步(asynchronous)中断:
同步中断是当指令执行时由 CPU 控制单元主动产生,之所以称为同步,是因为只有在一条指令执行完毕后 CPU 才会发出中断,而不是发生在代码指令执行期间,比如系统调用,根据 Intel 官方资料,同步中断称为异常(exception),异常可分为故障(fault)、陷阱(trap)、终止(abort)三类。
异步中断是指由其他硬件设备依照 CPU 时钟信号随机产生,即意味着中断能够在指令之间发生,例如键盘中断,异步中断被称为中断(interrupt),中断可分为可屏蔽中断(Maskable interrupt)和非屏蔽中断(Nomaskable interrupt)。
非屏蔽中断(Non-maskable interrupts,即NMI):就像这种中断类型的字面意思一样,这种中断是不可能被CPU忽略或取消的。NMI是在单独的中断线路上进行发送的,它通常被用于关键性硬件发生的错误,如内存错误,风扇故障,温度传感器故障等。
可屏蔽中断(Maskable interrupts):这些中断是可以被CPU忽略或延迟处理的。当缓存控制器的外部针脚被触发的时候就会产生这种类型的中断,而中断屏蔽寄存器就会将这样的中断屏蔽掉。我们可以将一个比特位设置为0,来禁用在此针脚触发的中断。
处理流程:
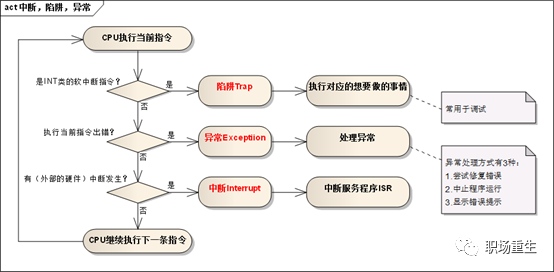
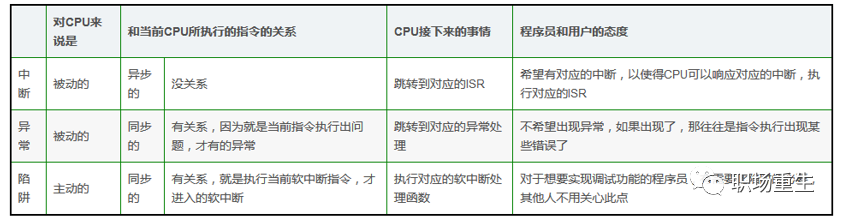
区别:
相同点:
1.最后都是由CPU发送给内核,由内核去处理;
2.处理程序的流程设计上是相似的。
不同点:
1.产生源不相同,陷阱、异常是由CPU产生的,而中断是由硬件设备产生的;
2.内核需要根据是异常,陷阱,还是中断调用不同的处理程序;
3.中断不是时钟同步的,这意味着中断可能随时到来;陷阱、异常是CPU产生的,所以,它是时钟同步的;
4.当处理中断时,处于中断上下文中;处理陷阱、异常时,处于进程上下文中。
中断亲和:
在 SMP 体系结构中,我们可以通过系统调用和一组相关的宏来设置 CPU 亲和力(CPU affinity),将一个或多个进程绑定到一个或多个处理器上运行。中断在这方面也毫不示弱,也具有相同的特性。中断亲和力是指将一个或多个中断源绑定到特定的 CPU 上运行;
在 /proc/irq 目录中,对于已经注册中断处理程序的硬件设备,都会在该目录下存在一个以该中断号命名的目录 IRQ# ,IRQ# 目录下有一个 smp_affinity 文件(SMP 体系结构才有该文件),它是一个 CPU 的位掩码,可以用来设置该中断的亲和力, 默认值为 0xffffffff,表明把中断发送到所有的 CPU 上去处理。如果中断控制器不支持 IRQ affinity,不能改变此默认值,同时也不能关闭所有的 CPU 位掩码,即不能设置成 0x0;
中断亲和好处是,在大量硬件中断场景,对于文件服务器、高流量 Web 服务器这样的应用来说,把不同的网卡 IRQ 均衡绑定到不同的 CPU 上将会减轻某个 CPU 的负担,提高多个 CPU 整体处理中断的能力;对于数据库服务器这样的应用来说,把磁盘控制器绑到一个 CPU、把网卡绑定到另一个 CPU 将会提高数据库的响应时间,优化性能。合理的根据自己的生产环境和应用的特点来平衡 IRQ 中断有助于提高系统的整体吞吐能力和性能;
Linux系统常见中断分类
时钟中断:时钟芯片产生,主要工作是处理和时间有关的所有信息,决定是否执行调度程序以及处理下半部分。和时间有关的所有信息包括系统时间、进程的时间片、延时、使用CPU的时间、各种定时器,进程更新后的时间片为进程调度提供依据,然后在时钟中断返回时决定是否要执行调度程序。下半部分处理程序是Linux提供的一种机制,它使一部分工作推迟执行。时钟中断要绝对保证维持系统时间的准确性,“时钟中断”是整个操作系统的脉搏。
NMI中断:外部硬件通过CPU的 NMI Pin 去触发(硬件触发),或者软件向CPU系统总线上投递一个NMI类型中断(软件触发),NMI中断的主要用途有两个:
用来告知操作系统有硬件错误(Hardware Failure),如内存错误,风扇故障,温度传感器故障等;
硬件IO中断:
大多数硬件外设IO中断,比如网卡,键盘,硬盘,鼠标,USB,串口等;
虚拟中断:
KVM里面一些中断退出和中断注入等,软件模拟中断;
查看方式:cat /proc/interrupts
Linux系统中断处理
由于中断会打断内核中进程的正常调度运行,所以要求中断服务程序尽可能的短小精悍;但是在实际系统中,当中断到来时,要完成工作往往需要进行大量的耗时处理。因此期望让中断处理程序运行得快,并想让它完成的工作量多,这两个目标相互制约,诞生顶/底半部机制。
中断上半部分:
中断处理程序是顶半部——接受中断,它就立即开始执行,但只有做严格时限的工作。能够被允许稍后完成的工作会推迟到底半部去,此后,在合适的时机,底半部会被开终端执行。顶半部简单快速,执行时禁止部分或者全部中断。
中断下半部分:
底半部稍后执行,而且执行期间可以响应所有的中断。这种设计可以使系统处于中断屏蔽状态的时间尽可能的短,以此来提高系统的响应能力。顶半部只有中断处理程序机制,而底半部的实现有软中断,tasklet和工作队列等实现方式;
软中断
软中断作为下半部机制的代表,是随着SMP(share memory processor)的出现应运而生的,它也是tasklet实现的基础(tasklet实际上只是在软中断的基础上添加了一定的机制)。软中断一般是“可延迟函数”的总称,有时候也包括了tasklet(请读者在遇到的时候根据上下文推断是否包含tasklet)。它的出现就是因为要满足上面所提出的上半部和下半部的区别,使得对时间不敏感的任务延后执行,而且可以在多个CPU上并行执行,使得总的系统效率可以更高。它的特性包括:产生后并不是马上可以执行,必须要等待内核的调度才能执行。软中断不能被自己打断(即单个cpu上软中断不能嵌套执行),只能被硬件中断打断(上半部), 可以并发运行在多个CPU上(即使同一类型的也可以)。所以软中断必须设计为可重入的函数(允许多个CPU同时操作),因此也需要使用自旋锁来保护其数据结构。
软中断的调度时机:
do_irq完成I/O中断时调用irq_exit。
系统使用I/O APIC,在处理完本地时钟中断时。
local_bh_enable,即开启本地软中断时。
SMP系统中,cpu处理完被CALL_FUNCTION_VECTOR处理器间中断所触发的函数时。
ksoftirqd/n线程被唤醒时。
软中断内核线程
在 Linux 中,中断具有最高的优先级。不论在任何时刻,只要产生中断事件,内核将立即执行相应的中断处理程序,等到所有挂起的中断和软中断处理完毕后才能执行正常的任务,因此有可能造成实时任务得不到及时的处理。中断线程化之后,中断将作为内核线程运行而且被赋予不同的实时优先级,实时任务可以有比中断线程更高的优先级。这样,具有最高优先级的实时任务就能得到优先处理,即使在严重负载下仍有实时性保证。但是,并不是所有的中断都可以被线程化,比如时钟中断,主要用来维护系统时间以及定时器等,其中定时器是操作系统的脉搏,一旦被线程化,就有可能被挂起,后果将不堪设想,所以不应当被线程化。
软中断优先在 irq_exit() 中执行,如果超过时间等条件转为 softirqd 线程中执行。满足以下任一条件软中断在 softirqd 线程中执行:
在 irq_exit()-》__do_softirq() 中运行,时间超过 2ms。
在 irq_exit()-》__do_softirq() 中运行,轮询软中断超过 10 次。
在 irq_exit()-》__do_softirq() 中运行,本线程需要被调度。
注:调用 raise_softirq() 唤醒软中断时,不在中断环境中。
TASKLET
由于软中断必须使用可重入函数,这就导致设计上的复杂度变高,作为设备驱动程序的开发者来说,增加了负担。而如果某种应用并不需要在多个CPU上并行执行,那么软中断其实是没有必要的。因此诞生了弥补以上两个要求的tasklet。它具有以下特性:
a)一种特定类型的tasklet只能运行在一个CPU上,不能并行,只能串行执行。
b)多个不同类型的tasklet可以并行在多个CPU上。
c)软中断是静态分配的,在内核编译好之后,就不能改变。但tasklet就灵活许多,可以在运行时改变(比如添加模块时)。
tasklet是在两种软中断类型的基础上实现的,因此如果不需要软中断的并行特性,tasklet就是最好的选择。也就是说tasklet是软中断的一种特殊用法,即延迟情况下的串行执行。
tasklet有两种,tasklet 和 hi-tasklet:
前者对应softirq_vec[TASKLET_SOFTIRQ];
后者对应softirq_vec[HI_SOFTIRQ]。只是后者排在softirq_vec[]的第一个,所以更早被执行;
/proc/softirqs 提供了软中断的运行情况
# cat /proc/softirqs CPU0 HI: 1 //高优先级TASKLET软中断 TIMER: 12571001 //定时器软中断 NET_TX: 826165 //网卡发送软中断 NET_RX: 6263015 //网卡接收软中断 BLOCK: 1403226 //块设备处理软中断 BLOCK_IOPOLL: 0 //块设备处理软中断 TASKLET: 3752 //普通TASKLET软中断 SCHED: 0 //调度软中断 HRTIMER: 0 //当前已经没有使用 RCU: 9729155 //RCU处理软中断,主要是callback函数处理
工作队列
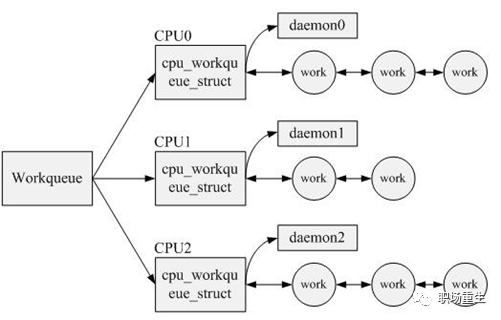
工作队列(work queue)是Linux kernel中将工作推后执行的一种机制。软中断运行在中断上下文中,因此不能阻塞和睡眠,而tasklet使用软中断实现,当然也不能阻塞和睡眠,工作队列可以把工作推后,交由一个内核线程去执行—这个下半部分总是会在进程上下文执行,因此工作队列的优势就在于它允许重新调度甚至睡眠。
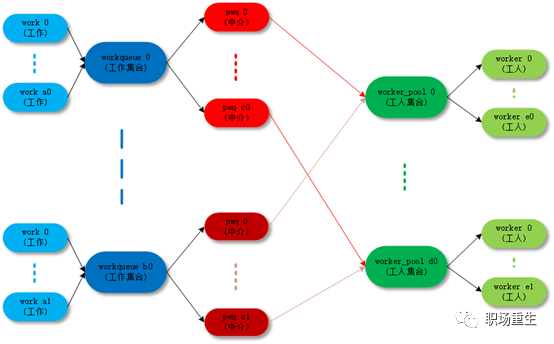
workqueue 中几个角色关系:
work :工作/任务。
workqueue :工作的集合。workqueue 和 work 是一对多的关系。
worker :工人。在代码中 worker 对应一个work_thread() 内核线程。
worker_pool:工人的集合。worker_pool 和 worker 是一对多的关系。
pwq(pool_workqueue):中间人 / 中介,负责建立起 workqueue 和 worker_pool 之间的关系。workqueue 和 pwq 是一对多的关系,pwq 和 worker_pool 是一对一的关系。
通常,在工作队列和软中断/tasklet中作出选择,可使用以下规则:
如果推后执行的任务需要睡眠,那么只能选择工作队列。
如果推后执行的任务需要延时指定的时间再触发,那么使用工作队列,因为其可以利用timer延时(内核定时器实现)。
如果推后执行的任务需要在一个tick之内处理,则使用软中断或tasklet,因为其可以抢占普通进程和内核线程,同时不可睡眠。
如果推后执行的任务对延迟的时间没有任何要求,则使用工作队列,此时通常为无关紧要的任务。
实际上,工作队列的本质就是将工作交给内核线程处理,因此其可以用内核线程替换。但是内核线程的创建和销毁对编程者的要求较高,而工作队列实现了内核线程的封装,不易出错,推荐使用工作队列。
中断上下文
中断代码运行于内核空间,中断上下文即运行中断代码所需要CPU上下文环境,需要硬件传递过来的这些参数,内核需要保存的一些其他环境(主要是当前被打断执行的进程或其他中断环境),这些一般都保存在中断栈中(x86是独立的,其他可能和内核栈共享,这和具体处理架构密切相关),在中断结束后,进程仍然可以从原来的状态恢复运行。
是否处于中断中,在Linux中是通过preempt_count来判断的,具体如下:

#define in_irq() (hardirq_count()) //在处理硬中断中
#define in_softirq() (softirq_count()) //在处理软中断中
#define in_interrupt() (irq_count()) //在处理硬中断或软中断中
#define in_atomic() ((preempt_count() & ~PREEMPT_ACTIVE) != 0) //包含以上所有情况
总结和注意的点:
1.Linux kernel的设计者制定了规则:
中断上下文不是调度实体,task才是【进程(主线程)或者线程】;
优先级顺序:硬中断上下文 》 软中断上下文 》 进程上下文 ;
中断上下文(hardirq和softirq context)并不参与调度(暂不考虑中断线程化),它们是异步事件的处理机制,目标就是尽快完成处理,返回现场。因此,所有中断上下文的优先级都是高于进程上下文的。也就是说,对于用户进程(无论内核态还是用户态)或者内核线程,除非disable了CPU的本地中断,否则一旦中断发生,它们是没有任何能力阻挡中断上下文抢占当前进程上下文的执行的。
2.Linux 将中断处理过程分成了两个阶段,也就是上半部和下半部:
上半部用来快速处理中断,它在中断禁止模式下运行,主要处理跟硬件紧密相关的或时间敏感的工作,需要快速执行;
下半部用来延迟处理上半部未完成的工作,通常以软中断方式运行,可以延迟执行。
3. 硬中断和软中断(只要是中断上下文)执行的时候都不允许内核抢占(本文后续章节会讲内核抢占)。因为在中断上下文中,唯一能打断当前中断handler的只有更高优先级的中断,它不会被进程打断(这点对于softirq,tasklet也一样,因此这些bottom half也不能睡眠);如果在中断上下文中睡眠,则没有办法唤醒它,因为所有的wake_up_xxx都是针对某个进程而言的,而在中断上下文中,没有进程的概念,没有相应task_struct(这点对于softirq和tasklet一样),因此真的睡眠了,比如调用了会导致阻塞的例程,内核几乎会挂。
4.硬中断可以被另一个优先级比自己高的硬中断“中断”,不能被同级(同一种硬中断)或低级的硬中断“中断”,更不能被软中断“中断”。软中断可以被硬中断“中断”,但是不会被另一个软中断“中断”。在一个CPU上,软中断总是串行执行。所以在单处理器上,对软中断的数据结构进行访问不需要加任何同步原语。
5.关中断不会丢失中断,但是对于期间到来的多个相同的中断会合并成一个,即只处理一次;时钟中断中需要更新jieffis计数值,如果多个中断合成一个,为了减少影响jieffis值准确性,需要其他硬件时钟来矫正。
本期结束,我们下期再见!!
原文标题:Linux 调度系统全景指南(上篇)
文章出处:【微信公众号:Linux爱好者】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
Linux
+关注
关注
87文章
11291浏览量
209303
原文标题:Linux 调度系统全景指南(上篇)
文章出处:【微信号:LinuxHub,微信公众号:Linux爱好者】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
如何在windows上emulate不同操作系统
linux是实时系统还是分时操作系统
linux操作系统安装步骤 linux操作系统的特点及组成

面向功能安全应用的汽车开源操作系统解决方案
Linux操作系统份额创历史新高,逼近4.5%里程碑
深入探讨Linux的进程调度器

嵌入式实时操作系统:Intewell操作系统与VxWorks操作系统有啥区别

工业实时操作系统对比:鸿道Intewell跟rt-linux有啥区别

研华工控机用什么系统?Windows与Linux操作系统的较量
工业控制:鸿道(Intewell)操作系统工业机器人控制解决方案
深度解析全球操作系统格局






 工商网监
工商网监
评论