 剖析3D视觉引导的拆装模机器人系统设计
剖析3D视觉引导的拆装模机器人系统设计
摘 要:针对传统PC 构件手工拆装模生产作业人员多、占地面积大和工位利用率低的生产方式,结合机器人运动控制技术、激光扫描技术和图像感知技术,提出了一种基于3D 视觉引导的直角坐标系机器人系统。在阐述视觉引导机器人自动拆装模具原理的基础上,设计了一种针对混凝土预制构件拆装模具的四自由度直角坐标系机器人系统,开发了基于EtherCAT 总线的分布式控制软硬件系统,并进行工厂实际生产测试。测试结果表明:该机器人可以直接由图纸驱动自动完成PC 构件的拆模和装模等核心生产过程;模具识别准确率高于99.5%;单个模具的装模节拍少于20 s;抓手中心重复定位精度达到±1 mm。为混凝土预制构件拆装模实现全自动化作业提供了完整解决方案。
近年来,随着经济的快速发展,劳动力成本的上升,预制构件加工精度与质量、装配式建筑施工技术和管理水平的提高以及国家政策因素的推动,预制装配式建筑呈现快速发展的态势[1]。混凝土预制构件(简称PC 构件)是实现建筑主体结构预制的基础,而当前国内PC 构件生产线装备的自动化水平远不能满足住宅工业化的发展需求[2]。按构件图纸形状和尺寸进行模具拼接和组装、构件生产完成后的模具清洗与回收等过程是PC 构件生产的核心环节[3]。目前,国内PC 生产线主要以手工或机械辅助拆装模为主,而国外用于拆装模具的机器人价格高且不能适应国内出筋构件的生产。
为此,本文提出一种基于3D 视觉引导的直角坐标系机器人系统,并在此基础上开发了用于拆装模具的机械抓手、用于生产出筋构件的模具以及其他辅助机构。最后对整个机器人系统进行了实际生产测试与分析,有效提高了系统的控制精度和节拍,完全满足PC 生产线对于拆模和装模的全自动化生产需求。
1 机器人本体结构设计
在工业机器人领域中,直角坐标机器人是具有多个自由度的一种典型多用途工业机器人,各自由度可建成空间直角关系,该机器人运动简单,承载能力强[4]。本文所设计的直角坐标机器人有4 个自由度,能够带动机械抓手在三维空间中沿X 轴、Y 轴以及Z 轴进行水平移动,Z 轴上的抓手可以围绕 Z 轴进行旋转。
所述直角坐标机器人本体结构模型如图 1 所示,主要由三轴联动龙门架以及安装在三轴联动龙门架上的机械手和模具识别传感器模块组成,其中三轴联动龙门架包括X 轴桁架、 Y 轴导轨、 YZ 滑台和Z 轴导轨。机器人中的4 个关节由4 个伺服电机进行驱动,通过现场总线实现机器人的精确定位、PC 构件生产的模具拆卸后识别回收、画线、 装模等工作,极大提高了生产效率,可杜绝人为因素导致的产品尺寸误差波动大,避免生产安全隐患。
1.X 轴桁架 2.Y 轴桁架 3.Z 轴桁架4.R 轴旋转抓手 5 机器人控制柜图1 4 轴直角机器人本体结构
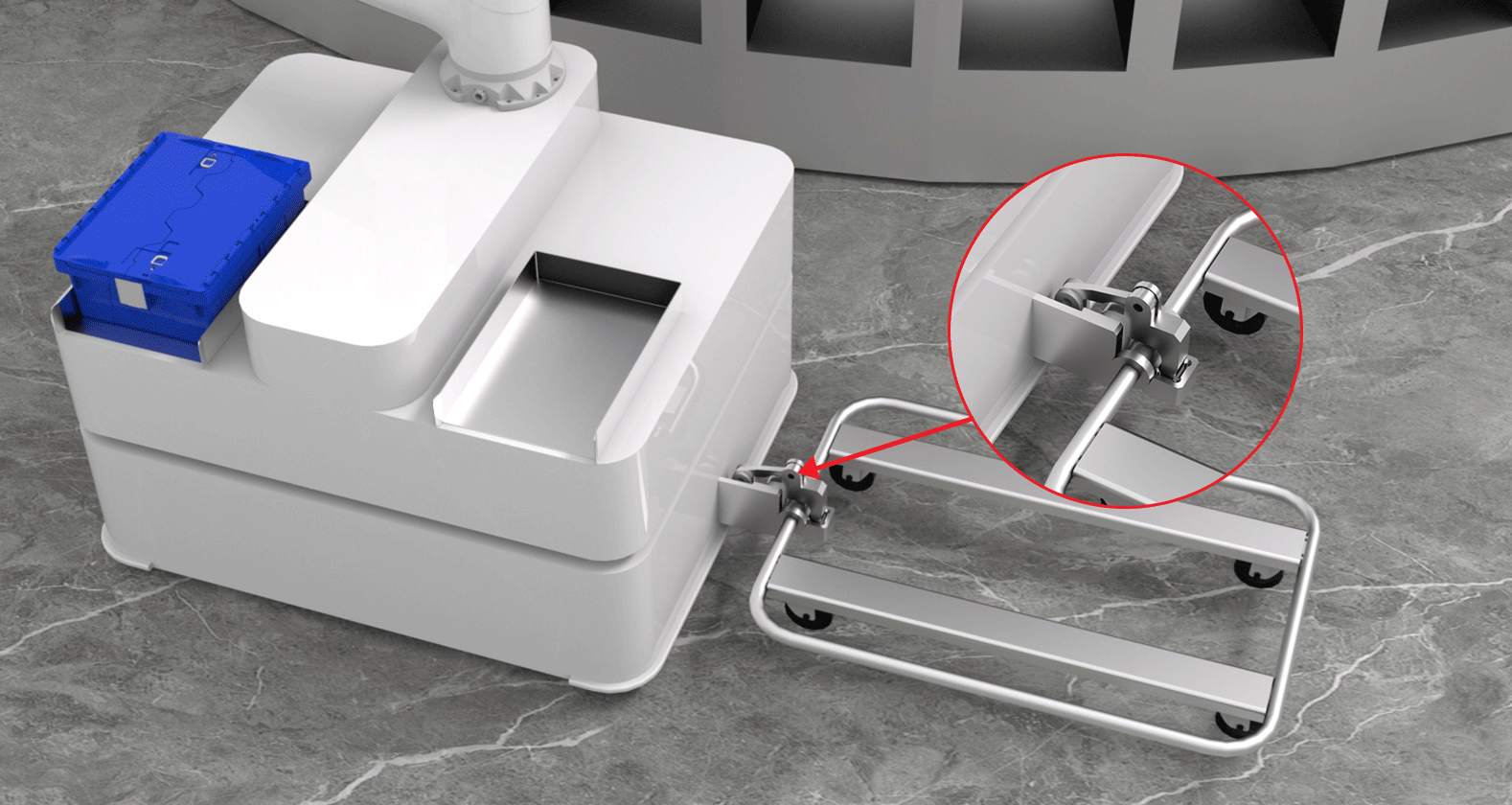
机械抓手结构如图2 所示,主要由抓手主体、夹抓模块、敲磁钉模块、中心定位模块和画线模块组成。抓手主体上相对安装有两组夹抓模块,两组夹抓模块内分别安装敲磁钉模块,定位模块与抓手主体连接,画线喷油模块与定位模块连接。夹爪、敲磁钉和中心定位模块均为气动结构,在抓手进气管道上安装有压力检测传感器,负责检测系统压力是否在安全范围内。
1. 中心定位插销 2. 喷墨画线机构 3. 激光测距传感器4. 敲磁钉气缸 5. 上下气缸 6. 压力传感器7. 电磁阀岛 8. 抓手机构图2 拆装模机器人抓手结构
2 3D 视觉系统设计
2.1 系统组成
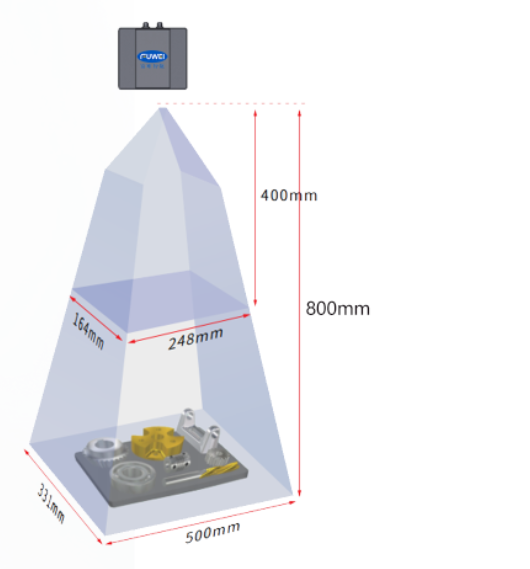
所设计的视觉系统硬件以PC 作为控制中心,由200 万像素工业相机、半导体线激光器以及相应的传感器固定装置组成。系统软件为基于Opencv 开发的对应的线激光处理算法。工业相机和半导体线激光以固定的角度和高度安装在拆装模机器人Z 轴。系统运行时,激光器发出一条结构光照射在待扫描工作台上,通过拆装模机器人X 方向匀速移动完成对整个工作台模具的扫描,生成点云图像,经过图像处理后输出模具的角度和坐标信息,以便于机械手拆模。
2.2 测量原理
所搭建的3D 视觉系统基于结构光测量技术,采用激光三角测距原理[5],如图3 所示,线激光照射在被测物上表面,被工业相机接收,点A、B 是激光束在不同高度的被测物表面上的中心位置,点A′、B′是工业相机靶面上的像点,点A 所在的平面设为基准面,AO的距离已知,由此可计算出高度H。
图3 3D 视觉系统结构示意图
机器人带着模具识别传感器模块以固定速度沿X 方向运动至整个工作平台扫描结束。
2.3 点云图象处理
首先将相机标定至机器人坐标系下,每一帧图象中激光线上X 方向的点由机器人位置给出,Y 方向的点取相机像素坐标,Z 方向的高度值H 可以计算得出,通过连续扫描整个工作台,得到工作台上所有像素点的三维点云。
为进一步求出三维点云对应的模具特征信息,需要将三维点云进行平面模型投影滤波,将三维点云投影到Z=0 也就是X-Y 平面上[6]。点云投影并不能直接获取模具特征,转换完成的二维图像须包含每个点的深度,可用灰度图颜色的深浅来表示原点云数据的深度。通过设置合理的灰度( 深度) 阈值得到工作平台的二值图象。
由三维点云求解得到的二值图像存在很多噪点以及小的孔洞,这些都会影响最终模具识别的准确性,可以通过二值图像的基本形态学运算解决这些干扰。首先通过对图象腐蚀能够消融连通区域的边界,选择适当大小和形状的结构元素,可以滤除掉所有不能完全包含结构元素的噪声点[7]。腐蚀后的模具图象会变得比原始图象更瘦小,因此腐蚀后的图象需要再进行膨胀还原,以使图像的轮廓变得光滑,最终求解出目标模具的外接矩形轮廓。
2.4 拆模路径规划
由上可以得到每个模具在X-Y 平面的中心坐标和角度。每个模具具有统一的高度,机器人根据其中心坐标和角度就可以进行抓取后回收。机器人需要遍历每个模具的中心一次,使机器人遍历的路径最短等价于求解加权完全无向图中访问每个顶点的总权数最小的闭路,又称之为最优哈密顿回路[8]。目前还没有一种有效的算法来求解最优哈密顿回路,可使用近似算法解决该问题[。首先任意选取其中一个结点作为起点,每一步都寻找离上一步距离最短的点作为下一个结点,最终可以得到机器人近似最优路径轨迹。
3 机器人控制系统设计
3.1 系统总体设计
拆装模机器人控制系统硬件结构如图8 所示. 拆装模机器人主要控制和检测的对象为直角机器人X、Y、Z和R 轴伺服电机、机器人主站模块、模具输送系统、工作台清理系统和机械抓手模块。拆装模机器人系统主要由运动控制下位机、3D 视觉模块、本地上位人机交互系统和中控室MES 系统的机器人管理模块组成。
为使机器人具备更快的通信速度、更好的实时性、更精确的位置控制,本文采用EtherCAT 分布式总线网络控制方式完成伺服和各IO 从站之间的通信。EtherCAT 协议处理完全在硬件中进行,工作效率大大提高,1 000 个分布式I/O 数据的刷新周期仅为30μs[10]。本文选用倍福(Beckhoff)公司的CX 系列嵌入式PC为核心控制器,该控制器采用开放的EtherCAT 实时以太网总线协议,支持与第三方设备通信。上位机为PC机和触模显示器,主要负责3D 视觉算法程序运算、系统监控、人机界面的管理和指令控制,协调系统进行工作; 倍福CX 嵌入式PC 运动控制器为下位机,主要负责对上位机发出指令的处理,实现复杂精确的轨迹运动,伺服驱动器负责接收控制器发出的运动指令,驱动伺服电机运动,并根据编码器与传感器反馈的信号对电机进行调整;MES 系统负责构件图纸导入、图纸解析以及生产任务的发送,将解析后的数据和生产任务发送给下位机控制器执行。
3.2 系统软件实现
针对系统硬件的设计方案,用ST 结构文本语言在TwniCAT 中编写机器人控制主程序、机器人和MES 系统通讯接口程序以及机器人和上位机HMI 通讯接口程序。
系统任务类型和构件图纸数据由中控室MES 系统下发,主要分为扫描拆模和画线装模两种任务类型。扫描拆模:机器人收到任务后会判断模具缓存库空位是否足够,若有足够的库位则直接启动机器人和3D 视觉系统匀速沿X方向扫描整个模具平台,得到平台上每一个像素点的3维坐标值,并进一步提取模具特征,得到平台上所有模具在机器人坐标系下的中心坐标、角度和长度,按最短路径原则生成机器人拆模运动轨迹;画线装模:首先对MES 下发的图纸数据进行完整性和正确性校验,数据无异常则按构件外轮廓、预埋件轮廓坐标分类存储在机器人程序内存中,根据外轮廓形状特征和边长得出每条边的最优模具拼接组合,根据预埋轮廓的形状信息得出机器人X、Y 两轴直线和圆弧插补动作表,最后根据模具实际库存数据生成机器人运动轨迹。
系统本地上位机人机交互界面基于Qt4.5 开发。Qt 具有良好的结构化、灵活的面向对象的结构以及清晰的文档和直观的API,为开发跨平台桌面应用程序人机交互界面提供了良好的支持[11]。使用倍福公司提供的ADS 通讯协议完成控制器与上位机HMI 及MES 系统通讯。ADS 在传输层上使用的是TCP 协议,支持句柄直接访问变量数据,能够方便完成PC 和控制器的通讯,从而实现控制系统运行时与人机界面的数据交换。
系统触模屏主要由操作员登陆、生产监控、系统管理、任务列表和扫描识别等监控画面组成。
点击左上角的Logo 图标即可回到机器人系统主界面,从主界面可以快速进入其他各界面:生产监控界面可以动态显示MES 系统下发的图纸、每个轴的运动状态以及生产进度;系统管理界面主要完成模具、模具库管理以及关键位置的示教;任务列表界面用于显示机器人路径规划的结果;扫描识别界面用于3D 视觉识别结果及路径规划信息显示。机器人生产监控界面如图12 所示。
图11 人机界面控制窗口关系图
图12 本地上位机HMI 生产监控界面
4 实验分析
机器人抓手中心安装有一个用于画构件轮廓线的自动喷液机构,可以将构件图纸轮廓在工作平台画出来。抓手中心Z 方向装有一个激光测距传感器,主要用于检测接近目标物体的距离并反馈给控制器进行决策控制。激光传感器的性能参数如表1 所示。
实验1:将激光传感器分别安装在激光指向X、Y、Z 轴方向上, 校准后进行定位测试,将被测标准平面块固定在工作台上进行测试,机器人重复定位精度测试结果如表2 所示。
表2 中Δd 为控制某个轴运动指定位移后激光测距的变化量,测试得到的最大绝对误差是0.7 mm,由此可知抓手中心重复定位精度可达到±1 mm。
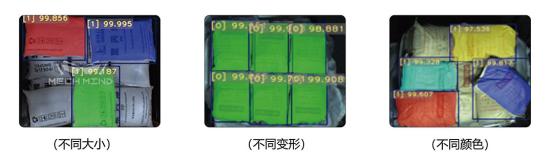
实验2:将生产用的模具随机放在正常生产用的工作平台上( 保证模具不超出视野边界),让机器人自动扫描识别并抓取回收。连续测试10 次,每次摆放的模具不少于30 个,得到模具识别抓取测试结果如表3 所示。
由实验结果可知,在319 个随机摆放的样本测试中,第9 次实验中有1 个模具中心坐标识别不准确导致该模具未能正确抓取回收,机器人发生故障(模具是否能成功被抓取是中心坐标是否识别正确的依据,在角度一致的情况下,抓手设计的抓取允许误差为±4 mm)。由此可知系统模具正确识别率优于99.5%。
5 结论
本文针对PC 构件生产中人工装模和拆模效率低、工位多、占地面积大等问题,设计了一种基于3D 视觉引导的机器人自动装拆模系统。生产实验结果表明:
1)该系统创新开发了一种低成本的激光扫描3D相机模具识别系统,其正确识别抓取率优于99.5%。
2)创新发明了一种出筋新型模具,开发了Allplan和CAD 构件图纸深度解析接口,真正实现了由图纸直接机器人进行柔性拆装模自动化生产,适应国内出筋和不出筋PC 构件柔性生产需求。
3)开发的通用线扫3D 识别物料和引导机器人定位系统可快速应用在其他视觉引导机器人进行搬运、码垛等场合,为建筑等其他视觉识别应用机器人提供了解决思路。该机器人已经在国内多条PC 生产线得到良好应用,有效提高了PC 构件生产的自动化水平。
参考文献
[1] 王星. 住宅产业化中PC 预制构件的技术应用[J]. 住宅与房地产,2018(2):108.
[2] 杨立胜. 住宅产业化P C 预制构件技术应用研究[ D ] .武汉:湖北工业大学,2017.
[3] 邵海东. 我国建筑工业化发展现状与思考探析[J]. 中国建材科技,2017,26(3):86,87.
[4] 陈彦宇, 田东庄, 许翠华, 等. 基于PLC 直角坐标式机器人控制系统的设计[ J ] . 自动化仪表, 2 0 1 8 , 3 9 ( 4 ) :42-45,50.
[5] Zhang Zili, Wu Guanghua, Wang Qiyue,etal. An automaticlarge-scale 3D coordinate measurement system based on visionguidance[P]. SPIE/COS Photonics Asia,2016.
[6] Jia Chaochuan,Yang Ting,Wang Chuanjiang,etal. A new fastfiltering algorithm for a 3D point cloud based on RGB-Dinformation.[J]. PloS one,2019,14(8).
[7] 赵继红, 俞和权. 预测跟踪一种二值图象的轮廓跟踪方法[J]. 自动化学报,1990(5):470-472.
[8] Yvonne Kemper,Jim Lawrence. The odd–even invariant andHamiltonian circuits in tope graphs[J]. European Journal ofCombinatorics,2018.
[9] 王亚丽, 徐晨东. 一种基于关联矩阵判断图的哈密顿性及求解哈密顿回路的算法[J]. 宁波大学学报( 理工版),2018,31(2):83-88.
[10] 张颖, 平雪良, 王晨学, 等.ROS 下基于EtherCAT 的串联机器人控制系统[J]. 传感器与微系统,2018,37(3):106-109.
[11] 沈炜, 王晓聪. 基于Qt 的嵌入式图形界面的研究和应用[J]. 工业控制计算机,2016,29(1):101,102,104.
[12] 杨勇军, 龙辛, 王纪新.EtherCAT 网络中非周期信息的实时调度[J]. 机械工程与自动化,2017(3):69,70.
编辑:jq
-
机器人
+关注
关注
212文章
28892浏览量
209545 -
PC
+关注
关注
9文章
2121浏览量
155088
原文标题:基于3D 视觉引导的拆装模机器人系统设计
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
机器人3D视觉传感器需求爆发!英特尔、奥比中光领跑,百亿市场争夺战开启
禾赛科技推出面向机器人领域的迷你3D激光雷达
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
解决方案 3D 视觉机器人赋能汽车制造新征程

开源项目!用ESP32做一个可爱的无用机器人
智能移动机器人

3D视觉引导的多SKU纸箱拆解
纸箱的拆码垛,3D视觉引导机器人无序抓取
3D视觉引导方案解决工厂产线上下料难题
重磅| 奥比中光全新双目系列3D相机,搭载自研芯片,为智能机器人而生

机器人3D视觉引导系统框架介绍

富唯智能案例|3D视觉引导机器人抓取鞋垫上下料







 工商网监
工商网监
评论