 一文知道伺服驱动器电子齿轮比的设置方法
一文知道伺服驱动器电子齿轮比的设置方法
我们说下伺服驱动器电子齿轮比的设置方法,电子齿轮比是干什么用的,我们通过使用伺服电机的电子齿轮, 行程比例变更,可以设定每个脉冲的移动量。下面我们通过位移量和旋转角度的电子齿轮比的设定来举例说明。
1位移量
位移量通过电子带动丝杆或同步带的旋转量转换,如下图:
伺服电机带丝杆
为了提高输出转矩,在电机和丝杆机械部分还需要通过减速机或者齿轮大小来连接,常见的就是一些减速机(蜗轮蜗杆、行星式减速机)或者设置不同大小的齿轮通常是小轮带着大轮旋转实现减速。以下图为例子,伺服电机编码器的分辨率是1000线通过4倍频就是4000p/r,减速机部分的减速比n=1/2,丝杆导程或者螺纹距Pb=10mm,现在要求将每个脉冲的移动量设定为10um也就是通常说的1丝。
机械丝杆
那么电子齿轮比是如何计算的呢, 首先我们看下在没有使用电子齿轮比情况下1个脉冲对应的移动量是1/8丝,没有达到我们的要求,因此需要放大量来提高使之到达1丝,这个放大量就是电子齿轮比数值就是相应提高8倍,也就是未使用电子齿轮比情况下移动量的倒数。使用电子齿轮比8/1时,1个脉冲对应的位移量就是1丝。
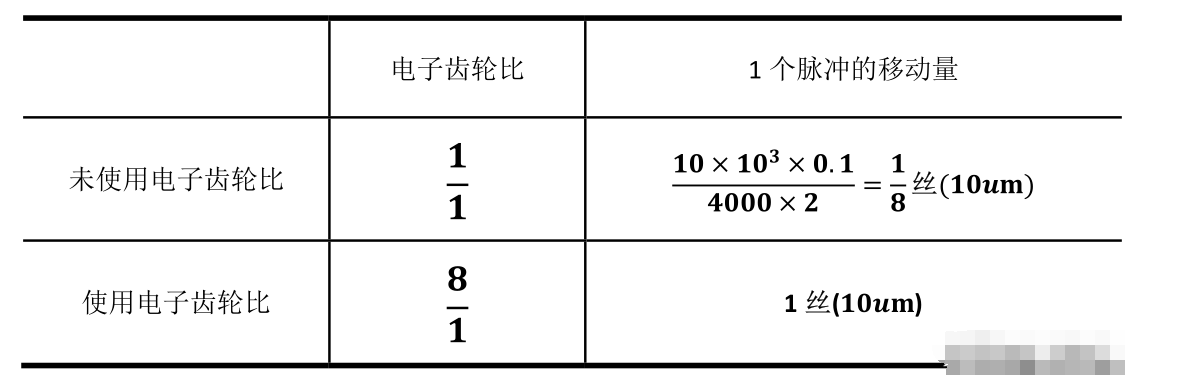
电子齿轮比
还有另外一种方法就是套公式:

电子齿轮比计算公式
其中,N、M是电子齿轮比的分子分母,△p是1个脉冲移动量,Pt是编码器分辨率,n是减速比,Pb是丝杠的导程(螺纹距)。
2角度量
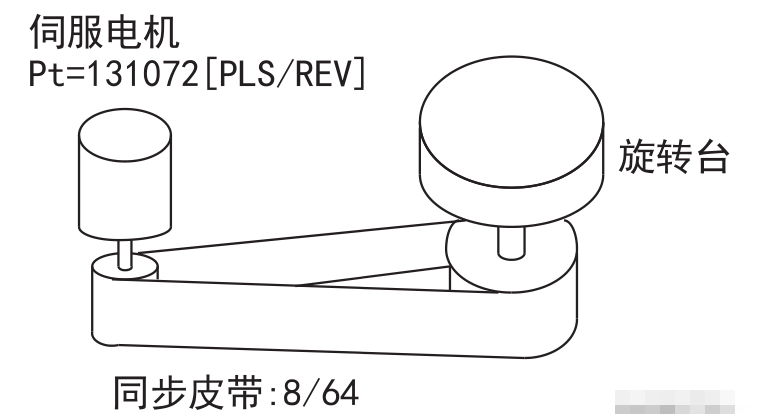
旋转台
角度量就是类似上面的传导装置,旋转台一圈就是Pb等于360°,减速比或者同步带轮比 n是8/64,伺服电机编码器分辨率是17位转换成脉冲量Pt就是131072p/r,现在要求将每个脉冲的旋转量设定△p为0.01°。和上面移动量分析一样,在没有使用电子齿轮比的时候,1个脉冲对应的旋转角度是1125/32768(0.01°),没有达到我们的要求,需要一个扩大倍数就是它的倒数32768/1125来扩大它后,也就是当设定电子齿轮比是32768/1125时,1个脉冲对用的角度就是0.01°。
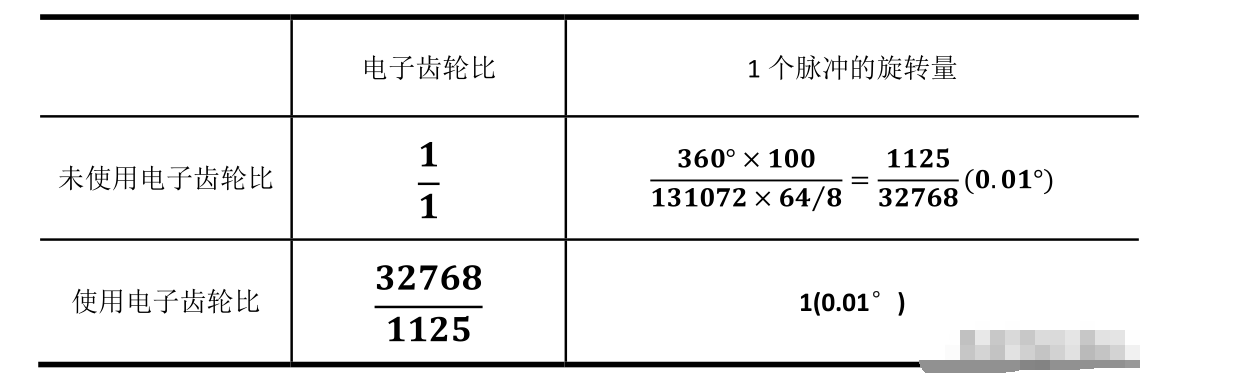
电子齿轮比计算
或者套公式:

公式
以上就是电子齿轮比的设定方法。
责任编辑人:CC
-
驱动器
+关注
关注
52文章
8226浏览量
146252 -
伺服驱动器
+关注
关注
22文章
481浏览量
31543 -
电子齿轮
+关注
关注
1文章
5浏览量
7437
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论