 能直接把生物耳朵“接”在机器人身上吗?
能直接把生物耳朵“接”在机器人身上吗?
通俗来讲,要想让机器人 “听见”,就需要麦克风阵列将声音信号转换为电信号,随后经过对电信号进行处理,获得声音包含的信息。
当然,打造机器人听觉,说起来容易做起来难。
机器人的听觉系统需要传感、机械、控制等因素的协调配合,可谓涵盖了多个学科,要想做到像人耳那样(能听辨出声音类型、内容、来源、远近、方位等)是一件困难的事情。
那么,既然模仿生物耳朵不易,那么直接把生物耳朵 “接”在机器人身上,可行吗?
其实,这个有点儿古怪甚至可以说是残忍的想法来自于以色列特拉维夫大学的一个研究小组。
前不久,该团队题为 Ear-Bot: Locust Ear-on-a-Chip Bio-Hybrid Platform(耳朵机器人:蝗虫耳朵芯片生物混合平台)的研究成果正式发表于《传感器》杂志。
生物耳朵有何优势?
这项研究中,研究团队选定的主角是蝗虫。
原因在于,经过数亿年的进化,昆虫已经获得了一些自然界中最为高效强大的感知器官,如果把这些感知器官视作传感器,那么相比众多人造传感器,这种传感器的优势在于体积小、重量轻、功耗低、可适用于多变的环境。
尤其是在听觉方面,昆虫的听觉传感器经过多次进化,已经可以发挥场景分析、交流的功能,有着高度的多样性,具体来看:
形态上,其耳朵可以是近场敏感的触角,也可以是远场敏感的鼓膜。
功能上,可以是窄带过滤器(蚊子),也可以是宽带传感器(夜蛾)。
神经处理上,可以只有一个神经元(夜蛾),也可以有数千个干预神经元(雄性蚊子耳朵有 15000 个神经元)。
而沙漠蝗虫耳朵较为敏感,所涵盖的频率范围广,可以被作为一个很好的从神经系统读取电生理信息的模型。
研究团队表示:
目前为止,还没有哪项研究证明生物混合机器人平台(bio-hybrid robotic platform)能够通过生物传感器对声音做出反应。在机器人平台上加入生物传感器,可以有两方面优势,一是可以将其行为、能力与特征鲜明的自然蝗耳进行比较,二是可以将其与纯粹的技术设备(麦克风阵列)进行比较。
把蝗虫耳朵 “接”在机器人身上
研究团队是如何做的呢?
论文显示,研究团队设计了一个生物混合平台 Ear-Bot,它集成了沙漠蝗虫的听觉系统作为传感输入,与一个移动机器人平台相连接。
通俗来讲就是,打造一个蝗虫耳朵芯片 Ear-Chip,将其作为机器人的听觉传感器。
在这个过程中,团队利用到了微生理系统(MPS,也称芯片上的器官 OoC)的最新发展,也就是 “人体器官芯片技术”。
人体器官芯片是一项新兴的前沿技术,简单来讲就是指一种在载玻片大小的芯片上构建的器官生理微系统,包含着活体细胞、组织界面、生物流体等器官微环境的关键要素,因此可以在体外模拟人体组织器官的主要结构功能特征以及器官间的联系。人体器官芯片技术背后是多学科的交叉汇聚,曾在 2016 年被列为十大新兴技术之一。
其实,Ear-Chip 的设计能使得蝗虫耳朵长期存活,同时也保证了它能被放置在移动的小型机器人平台上(如下图 a 所示)。
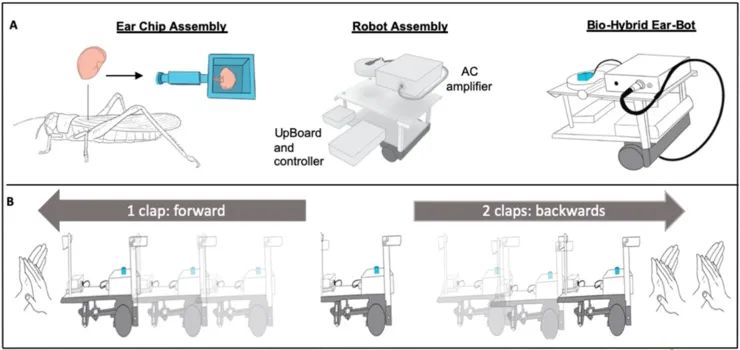
值得一提的是,研究团队通过 SolidWorks CAD 软件对芯片进行了设计,然后通过 3D 打印生物相容性牙科透明树脂进行芯片的制作,最终成功地创造了一种持久的微型感应装置。
基于此,研究团队创建了模块化的组织支持和信号分析自定义算法。
同时,Ear-Bot 还配备了定制电极,可测量耳朵的电生理反应,并将其传递给机器人。如上图 b 所示,机器人还集成了处理信号和运行不同算法所需的所有电子设备(包括前置放大器、电路板等)。
除了定制芯片 Ear-Chip 和电极以外,该机器人平台还包括一个信号放大器、一个控制器和信号处理器系统(CSPS)
响应来自不同方向和距离的声音
那么,具体效果如何?
实验表明,Ear-Bot 对声音的响应与使用麦克风作为输入所展示的响应类似。
研究人员拍拍手,蝗虫耳朵就会识别出声音并将其转换为电信号,并将其传输至机器人的电生理测量系统、控制器和信号处理系统。
值得一提的是,Ear-Bot 系统能够在混杂的噪声中区分出电机和拍手的声音。
也就是说,蝗虫耳朵对各种频率都较为敏感,可对真实的声音做出反应。如下图所示,其最佳响应在 3.5 kHz(±2)左右,对来自不同方向的声音的响应无显著变化,且对距离在 5-35cm 之间的声音响应无差异。
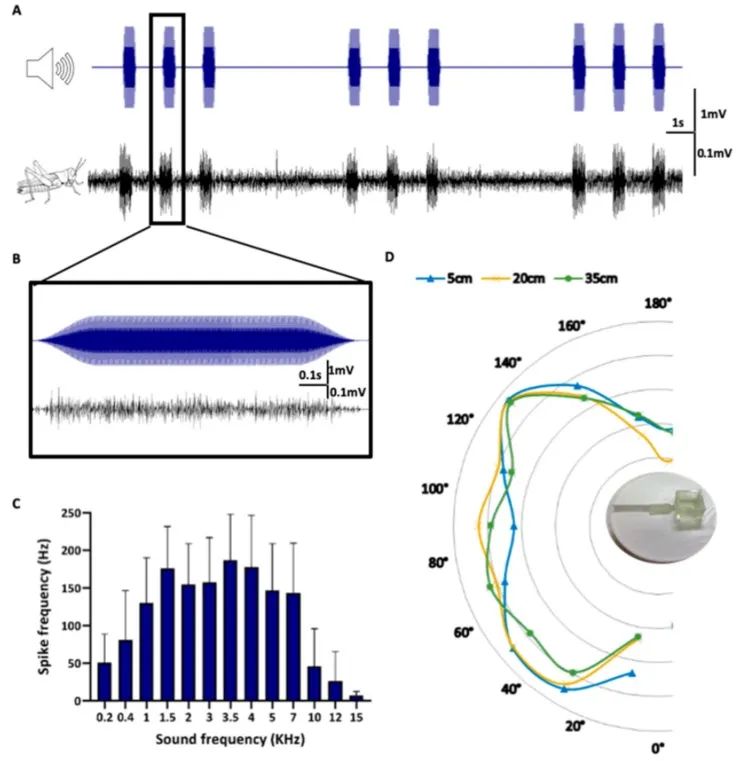
可见,Ear-bot 能够对来自不同方向和距离的声音做出反应。
对于上述研究成果,论文合著者之一 Ben M. Maoz 博士表示:
我们应当更为深入地去挖掘、利用自然界的现象和规律,我们证明的这一原理其实还可以用于其他感官,例如气味、视觉和触觉等。例如,某些动物在发现爆炸物、毒品方面有着惊人的能力,或许我们可以创建具有生物鼻子的机器人。
无疑,自然往往先于科研一步,期待科学家们以自然为灵感,带来更多前沿科技进展。
原文标题:给机器人装上蝗虫耳朵,以色列科学家实现生物传感器新突破
文章出处:【微信公众号:天津机器人】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
传感器
+关注
关注
2552文章
51219浏览量
754613 -
机器人
+关注
关注
211文章
28502浏览量
207485 -
信号
+关注
关注
11文章
2794浏览量
76880
原文标题:给机器人装上蝗虫耳朵,以色列科学家实现生物传感器新突破
文章出处:【微信号:tjrobot,微信公众号:天津机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
【「具身智能机器人系统」阅读体验】+数据在具身人工智能中的价值
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
变速齿轮在机器人中的使用
FOC电机在机器人技术中的作用
工业机器人常用的编程方式
柔性机器人与刚性机器人区别与联系






 工商网监
工商网监
评论