 基于STM32的自动跟踪小车
基于STM32的自动跟踪小车
概述
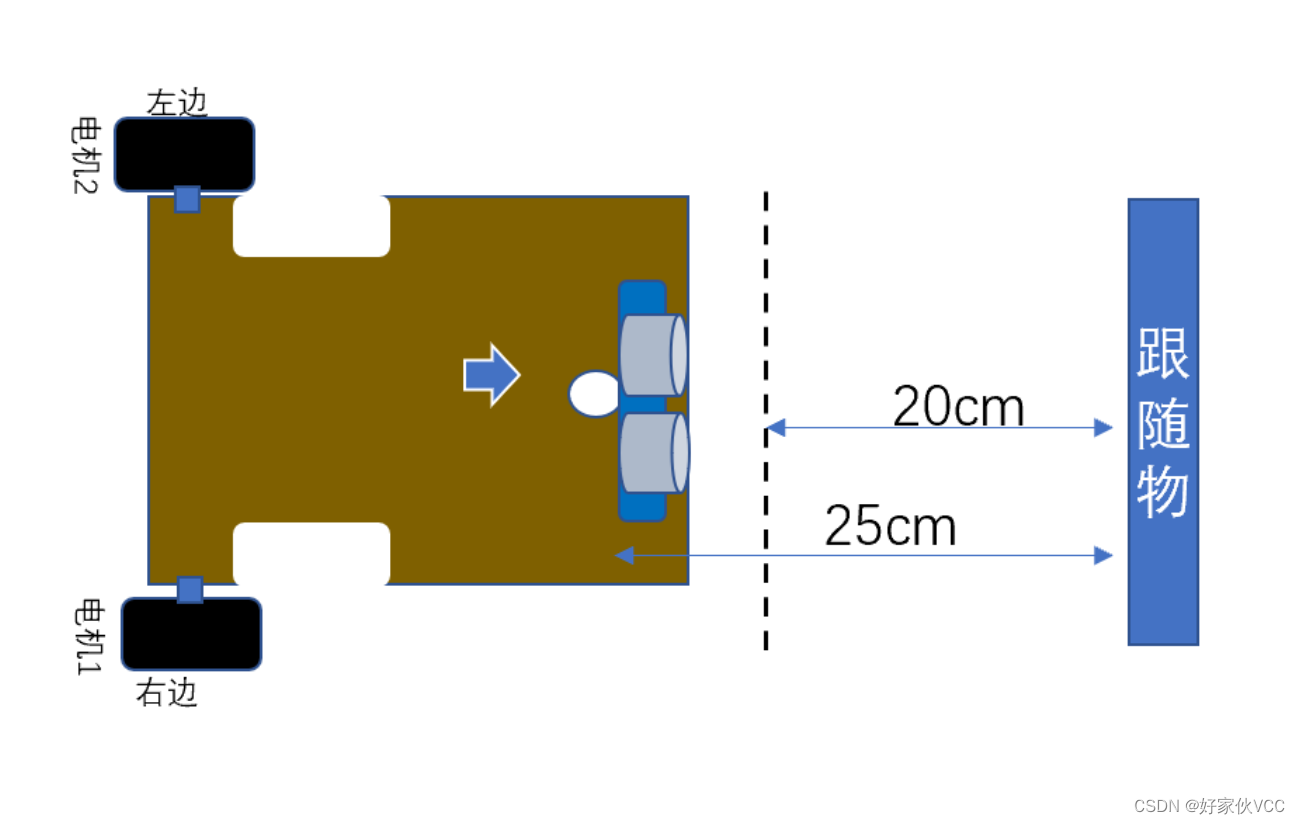
小车外形:
功能简介
利用摄像头识别前车尾部的AprilTag,得到前车位置,传回stm32主控板处理,使两车在行驶时保持恒定距离,实现自动跟车。
openMV4摄像头
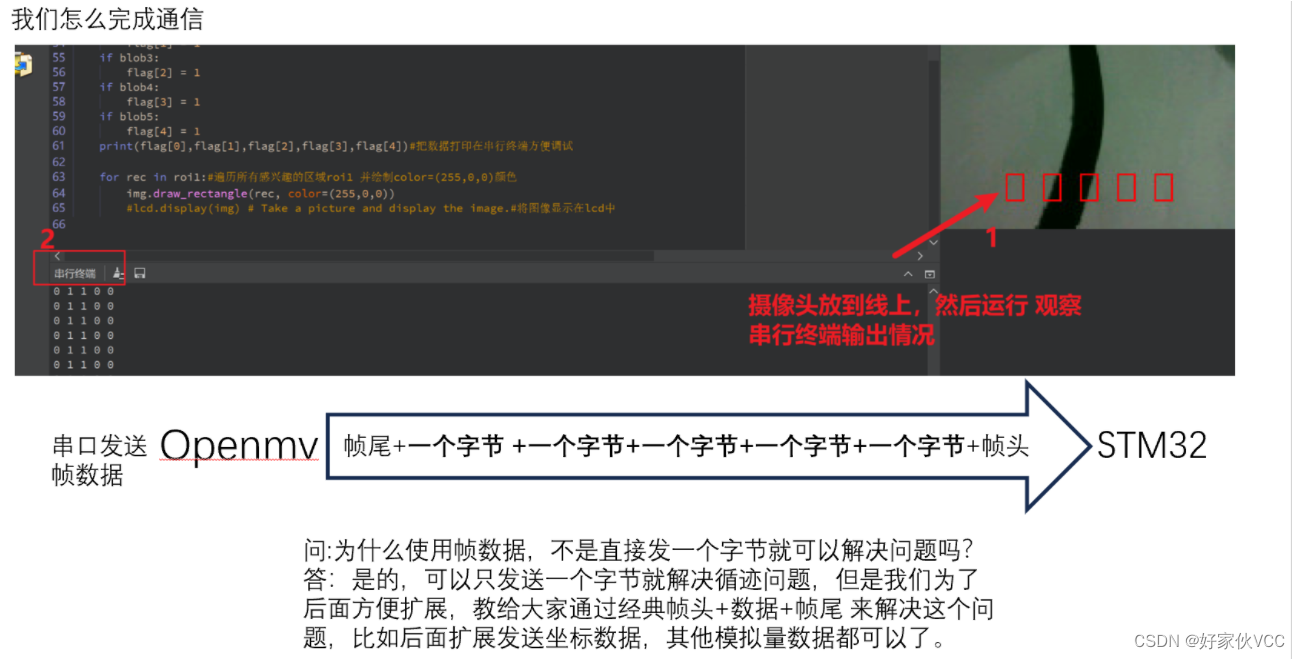
1.1 Apriltag识别与串口传输
AprilTag是一个视觉基准库,在AR,机器人,相机校准领域广泛使用。通过特定的标志(与二维码相似,但是降低了复杂度以满足实时性要求),可以快速地检测标志,并计算相对位置。
Apriltag示例:
通过识别Apriltag,可以得到x,y,z三个方向的距离以及偏移角度。这里只需要三维的距离即可,通过串口传回stm32.
import sensor, image, time, math,pybfrom pyb import UART sensor.reset()sensor.set_pixformat(sensor.RGB565)sensor.set_framesize(sensor.QQVGA) # we run out of memory if the resolution is much bigger...sensor.skip_frames(time = 2000)sensor.set_auto_gain(False) # must turn this off to prevent image washout...sensor.set_auto_whitebal(False) # must turn this off to prevent image washout...clock = time.clock()uart = UART(3, 115200)#串口波特率 f_x = (2.8 / 3.984) * 160 # find_apriltags defaults to this if not setf_y = (2.8 / 2.952) * 120 # find_apriltags defaults to this if not setc_x = 160 * 0.5 # find_apriltags defaults to this if not set (the image.w * 0.5)c_y = 120 * 0.5 # find_apriltags defaults to this if not set (the image.h * 0.5) def degrees(radians): return (180 * radians) / math.pi while(True): clock.tick() img = sensor.snapshot() for tag in img.find_apriltags(fx=f_x, fy=f_y, cx=c_x, cy=c_y): # defaults to TAG36H11 img.draw_rectangle(tag.rect(), color = (255, 0, 0)) img.draw_cross(tag.cx(), tag.cy(), color = (0, 255, 0)) print_args = (tag.x_translation(), tag.y_translation(), tag.z_translation()) #degrees(tag.x_rotation()), degrees(tag.y_rotation()), degrees(tag.z_rotation())) # Translation units are unknown. Rotation units are in degrees. # print("Tx %f, Ty %f, Tz %f" % print_args) uart.write("A%.2f,B%.2f,C%.2f," % print_args+' ')#设置特定格式,以便于stm32分割取得数据 #pyb.delay(500) # print(clock.fps())
STM32主控板(型号为F407)
2.1 时钟与中断配置
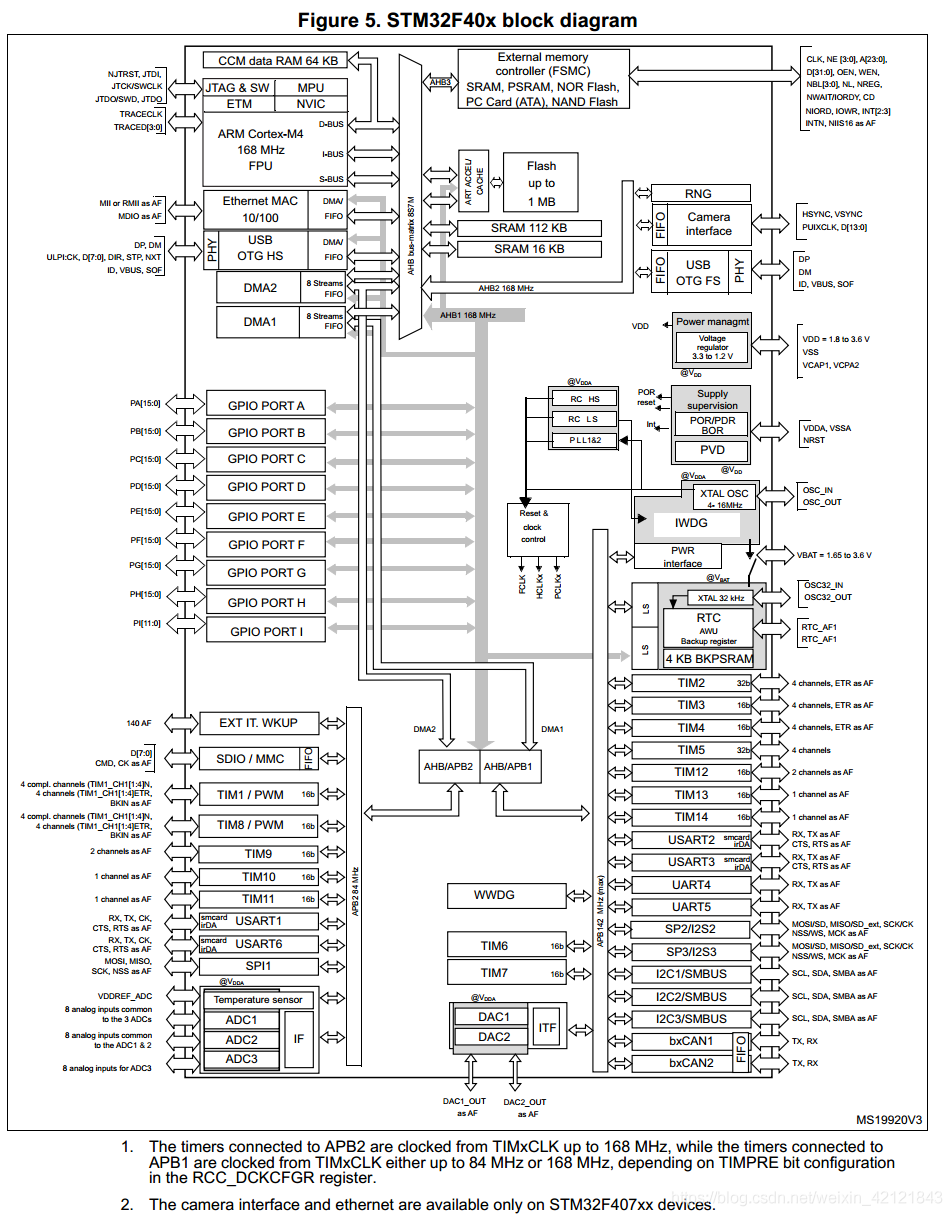
附上stm32时钟示意图:
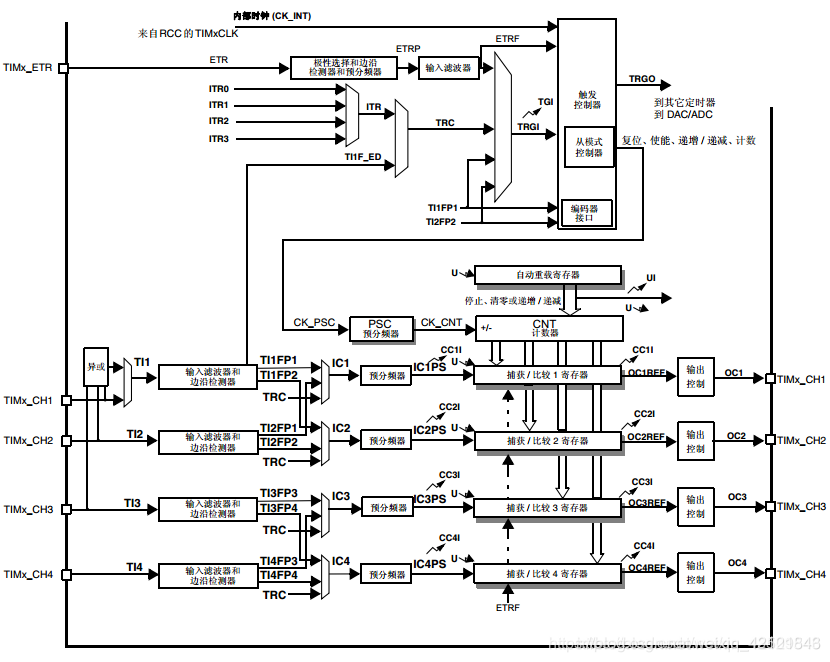
定时器示意图:
定时器分配:
所有时钟初始化的函数:(每个函数的详细内容在后面)
TIM8_PWM_Init(400-1,20-1); //用于控制电机,168M/20=8.4Mhz的计数频率,重装载值400,所以PWM频率为 8.4M/400=21Khz. TIM3_PWM_Init(200-1,8400-1);//用于控制舵机,50HZ TIM2_Int_Init(400-1,20-1);//定时中断,21KHZ TIM7_Int_Init(500-1,8400-1);//用于编码器计数,20HZ,50ms中断一次 uart_init(115200); //初始化串口1波特率为115200 Encoder_Init_TIM4();//编码器接口初始化
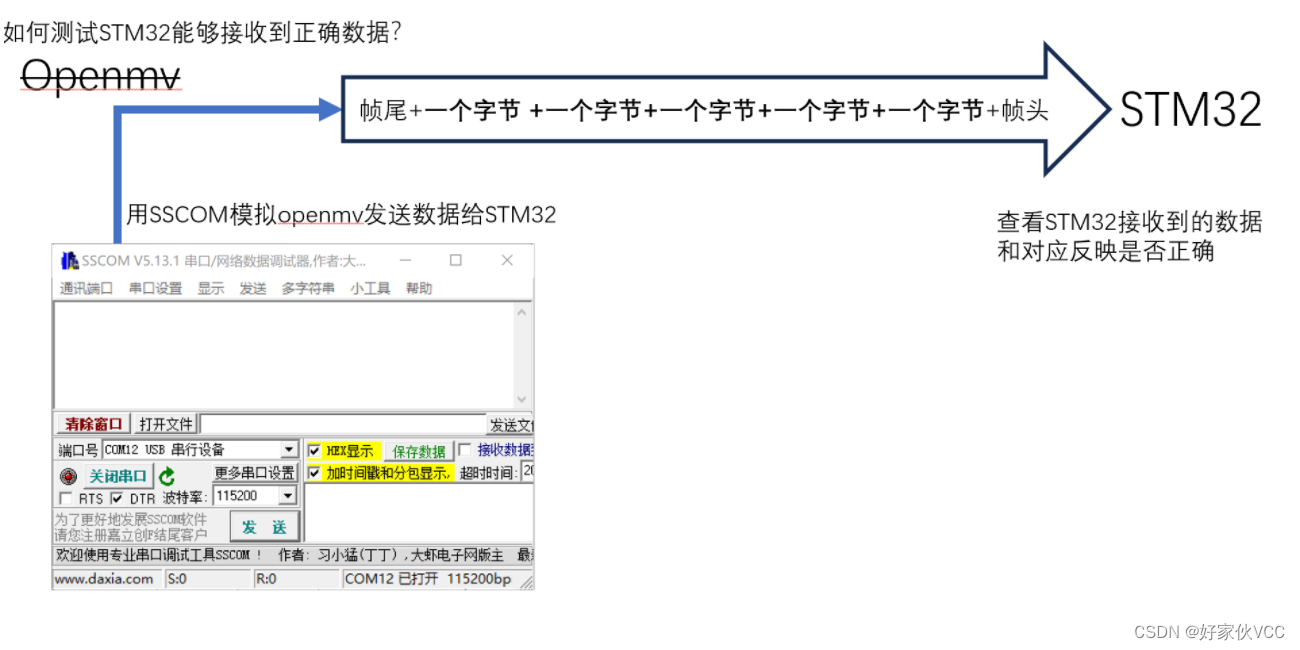
2.2 串口收发与数据处理
串口中断:USART1,USART2
串口初始化函数(以USART1为例):
void uart_init(u32 bound){ //GPIO端口设置 GPIO_InitTypeDef GPIO_InitStructure; USART_InitTypeDef USART_InitStructure; NVIC_InitTypeDef NVIC_InitStructure; RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); //使能GPIOA时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//使能USART1时钟 //串口1对应引脚复用映射 GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1); //GPIOA9复用为USART1 GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1); //GPIOA10复用为USART1 //USART1端口配置 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; //GPIOA9与GPIOA10 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出 GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉 GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA9,PA10 //USART1 初始化设置 USART_InitStructure.USART_BaudRate = bound;//波特率设置 USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式 USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位 USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式 USART_Init(USART1, &USART_InitStructure); //初始化串口1 USART_Cmd(USART1, ENABLE); //使能串口1 USART_ClearFlag(USART1, USART_FLAG_TC); #if EN_USART1_RX USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启相关中断 //Usart1 NVIC 配置 NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;//串口1中断通道 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3;//抢占优先级3 NVIC_InitStructure.NVIC_IRQChannelSubPriority =3; //子优先级3 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能 NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器、 #endif }
串口中断处理函数:
void USART1_IRQHandler(void) //串口1中断服务程序{ u8 Res;#ifdef OS_TICKS_PER_SEC //如果时钟节拍数定义了,说明要使用ucosII了. OSIntEnter(); #endif if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾) { Res =USART_ReceiveData(USART1);//(USART1->DR); //读取接收到的数据 if((USART_RX_STA&0x8000)==0)//接收未完成 { if(USART_RX_STA&0x4000)//接收到了0x0d { if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始 else USART_RX_STA|=0x8000; //接收完成了 } else //还没收到0X0D { if(Res==0x0d)USART_RX_STA|=0x4000; else { USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ; USART_RX_STA++; if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收 } } } } #ifdef OS_TICKS_PER_SEC //如果时钟节拍数定义了,说明要使用ucosII了. OSIntExit(); #endif} #endif
字符串接收与处理(从openMV接收到的数据):
/*涉及到的全局变量float data[3];//x,y,z方向的距离,浮点数形式unsigned char data_string[3][7];//x,y,z方向的距离,字符串形式*/if(USART_RX_STA&0x8000) { //清空字符串 for(i=0;i<2;i++) { for(j=0;j<6;j++) { data_string[i][j]=' '; } } len=USART_RX_STA&0x3fff;//得到此次接收到的数据长度 for(t=0,j=0;t
字符串转化为两位小数浮点数(用于后续PID控制):
int myatof(const char *str)//此函数仅适用于两位小数的浮点数,返回的是乘100后的int值,因float返回有错误{ int flag = 1;//表示正数 int res =0; u8 i=1; //小数点后两位 while(*str != '') { if( !(*str >= '0' && *str <= '9'))//找到字符串中的第一个数字 { str++; continue; } if(*(str-1) == '-') { flag=-1;//表示是一个负数 } while(*str >= '0' && *str <= '9') { res = res *10 + (*str - '0'); str++; } if(*str == '.') { str++; res = res *10 + (*str - '0'); str++; res = res *10 + (*str - '0');//保留两位,故加两次 return res*flag; } }}
2.3 LCD显示模块
LCD模块用于调试时观察数据,调试完成可以删去,因为显示屏很耗时,使处理速度变慢
void LCD_GPIO_Init(void);void Lcd_WriteIndex(u8 Index);void Lcd_WriteData(u8 Data);void Lcd_WriteReg(u8 Index,u8 Data);u16 Lcd_ReadReg(u8 LCD_Reg);void Lcd_Reset(void);void Lcd_Init(void);void Lcd_Clear(u16 Color);void Lcd_SetXY(u16 x,u16 y);void Gui_DrawPoint(u16 x,u16 y,u16 Data);unsigned int Lcd_ReadPoint(u16 x,u16 y);void Lcd_SetRegion(u16 x_start,u16 y_start,u16 x_end,u16 y_end);void LCD_WriteData_16Bit(u16 Data);
TFT屏幕初始化:
void TFT_Init_Show(void){ Lcd_Clear(WHITE); Gui_DrawFont_GBK16(16,70,BLACK,WHITE,"by WILL CHAN"); delay_ms(1000); Lcd_Clear(WHITE); Gui_DrawFont_GBK16(3,0,RED,WHITE,"X:"); Gui_DrawFont_GBK16(3,20,RED,WHITE,"Y:"); Gui_DrawFont_GBK16(3,40,RED,WHITE,"Z:"); Gui_DrawFont_GBK16(3,60,RED,WHITE,"speed:");}
字符串显示函数;
void Gui_DrawFont_GBK16(u16 x, u16 y, u16 fc, u16 bc, u8 *s){ unsigned char i,j; unsigned short k,x0; x0=x; while(*s) { if((*s) < 128) { k=*s; if (k==13) { x=x0; y+=16; } else { if (k>32) k-=32; else k=0; for(i=0;i<16;i++) for(j=0;j<8;j++) { if(asc16[k*16+i]&(0x80>>j)) Gui_DrawPoint(x+j,y+i,fc); else { if (fc!=bc) Gui_DrawPoint(x+j,y+i,bc); } } x+=8; } s++; } else { for (k=0;k
2.4 电机、舵机与编码器
定时中断:TIM2,用于修改电机和舵机的PWM占空比
//通用定时器2中断初始化//arr:自动重装值。//psc:时钟预分频数//定时器溢出时间计算方法:Tout=((arr+1)*(psc+1))/Ft us.//Ft=定时器工作频率,单位:Mhz//这里使用的是定时器2!void TIM2_Int_Init(u16 arr,u16 psc){ TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; NVIC_InitTypeDef NVIC_InitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE); ///使能TIM2时钟 TIM_TimeBaseInitStructure.TIM_Period = arr; //自动重装载值 TIM_TimeBaseInitStructure.TIM_Prescaler=psc; //定时器分频 TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上计数模式 TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1; TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);//初始化TIM3 TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE); //允许定时器2更新中断 TIM_Cmd(TIM2,ENABLE); //使能定时器2 NVIC_InitStructure.NVIC_IRQChannel=TIM2_IRQn; //定时器2中断 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0; //抢占优先级1 NVIC_InitStructure.NVIC_IRQChannelSubPriority=2; //子优先级3 NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE; NVIC_Init(&NVIC_InitStructure); }
TIM2中断处理函数:
void TIM2_IRQHandler(void){ if(TIM_GetITStatus(TIM2,TIM_IT_Update)==SET)//溢出中断 { if(motor_flag==1)//反转 { TIM_SetCompare1(TIM8,motor_duty*PID_val_motor*400.0);//和定时器的自动重装载值进行比较,来设置占空比,引脚:PC6 TIM_SetCompare2(TIM8,0); } if(motor_flag==0)//正转 { TIM_SetCompare1(TIM8,0); TIM_SetCompare2(TIM8,motor_duty*PID_val_motor*400.0);//和定时器的自动重装载值进行比较,来设置占空比,引脚:PC7 } TIM_SetCompare1(TIM3,200-(servo_angle/45.0+1)*5);//设置舵机角度,引脚:PA6 } TIM_ClearITPendingBit(TIM2,TIM_IT_Update); //清除中断标志位}
PWM输出:TIM3(舵机),TIM8(电机)
void TIM8_PWM_Init(u32 arr,u32 psc){ //此部分需手动修改IO口设置 GPIO_InitTypeDef GPIO_InitStructure; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_OCInitTypeDef TIM_OCInitStructure; TIM_BDTRInitTypeDef TIM_BDTRInitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM8,ENABLE); //TIM8时钟使能 RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA|RCC_AHB1Periph_GPIOB|RCC_AHB1Periph_GPIOC, ENABLE); //使能PORTA时钟 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7; //GPIOFA GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度100MHz GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出 GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉 GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA7 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1; GPIO_Init(GPIOB,&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7|GPIO_Pin_8; GPIO_Init(GPIOC,&GPIO_InitStructure); GPIO_PinAFConfig(GPIOC,GPIO_PinSource6,GPIO_AF_TIM8); //GPIOA8复用为定时器1 GPIO_PinAFConfig(GPIOC,GPIO_PinSource7,GPIO_AF_TIM8); //GPIOA9复用为定时器1 GPIO_PinAFConfig(GPIOC,GPIO_PinSource8,GPIO_AF_TIM8); //GPIOA10复用为定时器1 GPIO_PinAFConfig(GPIOA,GPIO_PinSource7,GPIO_AF_TIM8); //GPIOB13复用为定时器1 GPIO_PinAFConfig(GPIOB,GPIO_PinSource0,GPIO_AF_TIM8); //GPIOB14复用为定时器1 GPIO_PinAFConfig(GPIOB,GPIO_PinSource1,GPIO_AF_TIM8); //GPIOB15复用为定时器1 TIM_TimeBaseStructure.TIM_Prescaler=psc; //定时器分频 TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上计数模式 TIM_TimeBaseStructure.TIM_Period=arr; //自动重装载值 TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1; TIM_TimeBaseInit(TIM8,&TIM_TimeBaseStructure);//初始化定时器1 //初始化PWM模式 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable; TIM_OCInitStructure.TIM_Pulse = 0; TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High; TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset; TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCIdleState_Reset; TIM_OC1Init(TIM8, &TIM_OCInitStructure); TIM_OC2Init(TIM8, &TIM_OCInitStructure); TIM_OC3Init(TIM8, &TIM_OCInitStructure); TIM_OC1PreloadConfig(TIM8,TIM_OCPreload_Enable); TIM_OC2PreloadConfig(TIM8,TIM_OCPreload_Enable); TIM_OC3PreloadConfig(TIM8,TIM_OCPreload_Enable); TIM_BDTRInitStructure.TIM_OSSRState = TIM_OSSRState_Enable; TIM_BDTRInitStructure.TIM_OSSIState = TIM_OSSIState_Enable; TIM_BDTRInitStructure.TIM_LOCKLevel = TIM_LOCKLevel_OFF; TIM_BDTRInitStructure.TIM_DeadTime = 0; TIM_BDTRInitStructure.TIM_Break = TIM_Break_Disable; TIM_BDTRInitStructure.TIM_BreakPolarity = TIM_BreakPolarity_Low; TIM_BDTRInitStructure.TIM_AutomaticOutput = TIM_AutomaticOutput_Disable; TIM_BDTRConfig(TIM8,&TIM_BDTRInitStructure); TIM_Cmd(TIM8,ENABLE); TIM_CCPreloadControl(TIM8,ENABLE); TIM_CtrlPWMOutputs(TIM8,ENABLE); }
编码器初始化函数:
void Encoder_Init_TIM4(void){ GPIO_InitTypeDef GPIO_InitStructure; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_ICInitTypeDef TIM_ICInitStructure; NVIC_InitTypeDef NVIC_InitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4,ENABLE);//开启TIM4时钟 RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB,ENABLE);//开启GPIOB时钟 GPIO_PinAFConfig(GPIOB,GPIO_PinSource6,GPIO_AF_TIM4);//PB6引脚复用 GPIO_PinAFConfig(GPIOB,GPIO_PinSource7,GPIO_AF_TIM4);//PB7引脚服用 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7; //GPIOB6,GPIOB7 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_OType = GPIO_OType_OD; //GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL ; GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; GPIO_Init(GPIOB,&GPIO_InitStructure); NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; /*它的抢占优先级可以尽量设置低点*/ NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; NVIC_InitStructure.NVIC_IRQChannelCmd = DISABLE;//禁用中断,防止计数溢出而没有相应函数,造成卡死 NVIC_Init(&NVIC_InitStructure); TIM_TimeBaseStructure.TIM_Period = 4095; //设置下一个更新事件装入活动的自动重装载寄存器周期的值 TIM_TimeBaseStructure.TIM_Prescaler = 0; //设置用来作为TIMx时钟频率除数的预分频值 不分频 TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式 TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); TIM_EncoderInterfaceConfig(TIM4, TIM_EncoderMode_TI12,TIM_ICPolarity_Rising,TIM_ICPolarity_Falling); TIM_ICStructInit(&TIM_ICInitStructure); TIM_ICInitStructure.TIM_ICFilter = 10; //输入滤波器 TIM_ICInit(TIM4, &TIM_ICInitStructure); TIM_ClearFlag(TIM4, TIM_FLAG_Update); //清除所有标志位 TIM_ITConfig(TIM4, TIM_IT_Update, DISABLE); //允许中断更新 TIM4->CNT = 0; TIM_Cmd(TIM4, ENABLE); //使能TIM4}
编码器返回速度值:
/**************************************************************************函数功能:单位时间读取编码器计数入口参数:定时器返回 值:速度值**************************************************************************/float Read_Encoder_Speed(uint8_t TIMX){ int32_t Encoder_TIM; float res = 0; switch (TIMX) { case 5: Encoder_TIM = TIM_GetCounter(TIM5); TIM5->CNT = ENCODER_BASE_COUNT; res = (int32_t)Encoder_TIM - ENCODER_BASE_COUNT; break; case 4: Encoder_TIM = TIM_GetCounter(TIM4); TIM4->CNT = ENCODER_BASE_COUNT; res = (int32_t)Encoder_TIM - ENCODER_BASE_COUNT; break; default: Encoder_TIM = 0; res = 0; } if(res>2048.0f) res-=4096.0f; return res*360.0f/4096.0f;}
定时从编码器取数,注意,时间不一样,取回的数值也不一样,取决于实际速度以及编码器线数。这里50ms取一次:
void TIM7_IRQHandler(void)//频率20HZ,用于编码器计数{ if(TIM_GetITStatus(TIM7,TIM_IT_Update)==SET)//溢出中断 { speed=Read_Encoder_Speed(4); } TIM_ClearITPendingBit(TIM7,TIM_IT_Update); //清除中断标志位}
2.5 PID控制
PID库函数:
#define N 2 //需要对多少变量进行pid调节 const float KP[N]={1.3,1.0};//这里只用了比例调节const float KI[N]={0,0};const float KD[N]={0,0}; struct _pid{ float SetVol; //定义设定值 float ActVol; //定义实际值 float Err; //定义误差 float Err_Next; //定义上一个误差 float Err_Last; //定义上上一个误差 float Kp,Ki,Kd; //定义比例、积分、微分系数 float integral; //定义积分值 float actuator; //定义控制器执行变量}pid[N]; void PID_Init(void){ for(int i=0;i
主函数中的PID调节:
z_get=data[2]; x_get=data[0]; if(z_get-z_set>0.5||z_get-z_set<-0.5)//电机PID { LED1=0; //调节时灯亮 PID_val_motor=PID_realize(z_set,z_get,0); PID_val_motor=PID_val_motor/10.0; if(PID_val_motor<=0) motor_flag=0;//motor_flag控制电机正反转,PID_val_motor用于改变占空比,范围0~1 if(PID_val_motor>0) motor_flag=1; PID_val_motor=abs_float(PID_val_motor); if(PID_val_motor>2)PID_val_motor=0;//标志太远,让车停止 if(PID_val_motor>1&&PID_val_motor<=2)PID_val_motor=1; if(PID_val_motor<0.2)PID_val_motor=0; } if(x_get-x_set>0.1||x_get-x_set<-0.1)//舵机PID { LED1=0; PID_val_servo=PID_realize(x_set,x_get,1); servo_angle=((140-35)/6)*PID_val_servo+35;//线性映射,把PID的值转化为角度35~140的舵机转角 if(servo_angle<35)servo_angle=35; if(servo_angle>140)servo_angle=140; } LED1=1;
定时器TIM2中断里改变占空比:
void TIM2_IRQHandler(void){ if(TIM_GetITStatus(TIM2,TIM_IT_Update)==SET)//溢出中断 { if(motor_flag==1)//反转 { TIM_SetCompare1(TIM8,motor_duty*PID_val_motor*400.0);//和定时器的自动重装载值进行比较,来设置占空比,引脚:PC6 TIM_SetCompare2(TIM8,0); } if(motor_flag==0)//正转 { TIM_SetCompare1(TIM8,0); TIM_SetCompare2(TIM8,motor_duty*PID_val_motor*400.0);//和定时器的自动重装载值进行比较,来设置占空比,引脚:PC7 } TIM_SetCompare1(TIM3,200-(servo_angle/45.0+1)*5);//设置舵机角度,根据舵机手册得到占空比与转角的关系,引脚:PA6 } TIM_ClearITPendingBit(TIM2,TIM_IT_Update); //清除中断标志位}
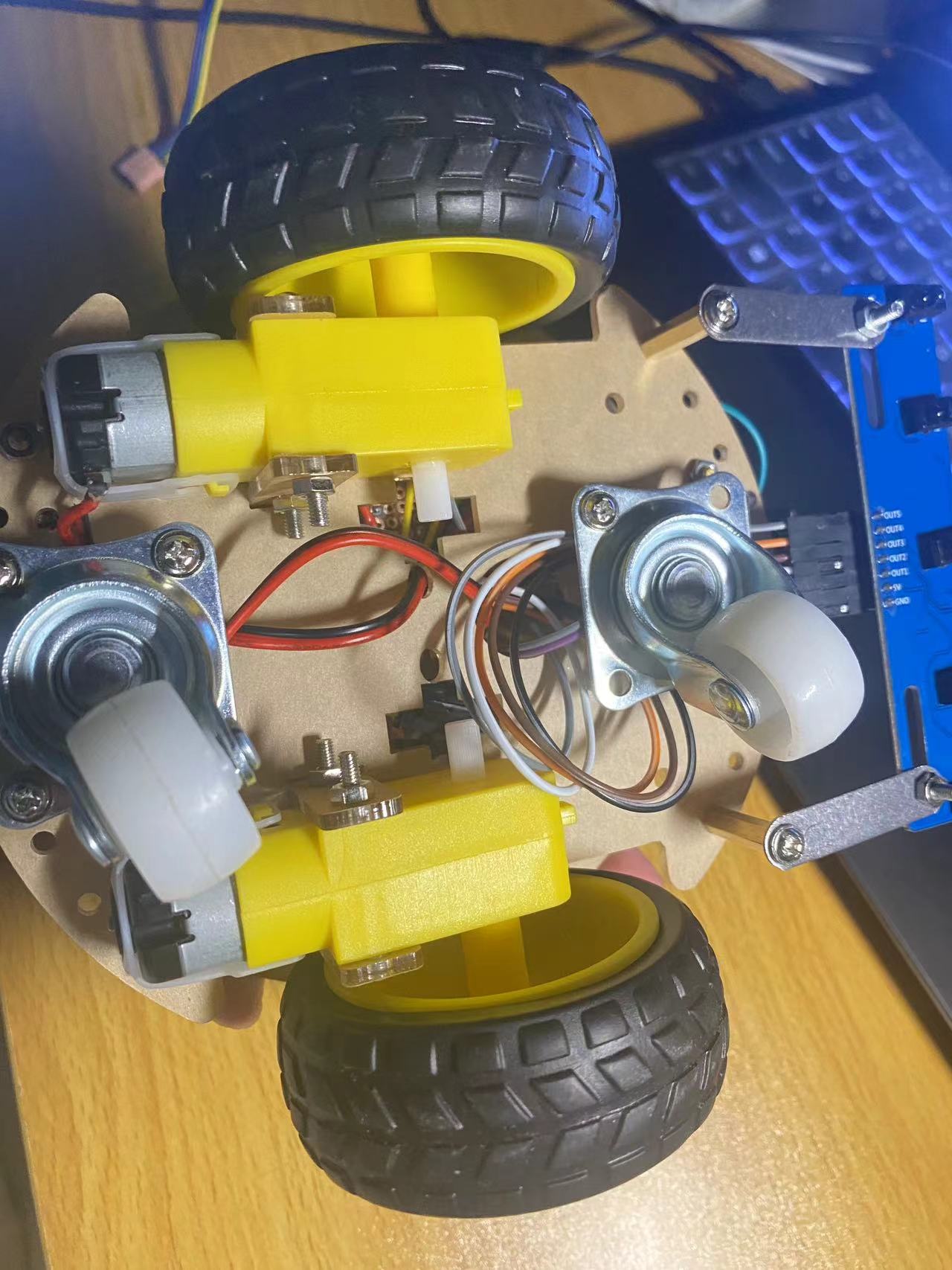
电源与电机驱动
3.1 L298N电机驱动板
因为后面两路电机要求同速,故把AB两通道用线短接,用一路PWM控制两路电机。
具体控制代码见上面TIM2中断处理函数中,利用两路定时器轮流输出PWM(另一路为零),即可控制电机正反转。
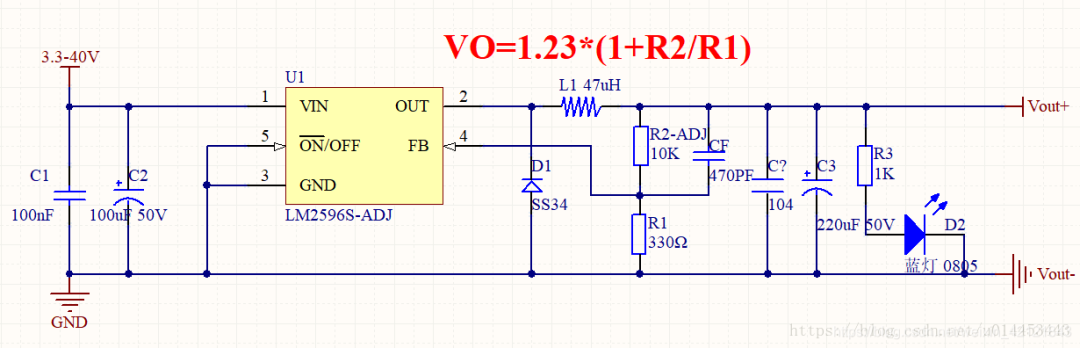
3.2 LM2596降压模块
手册中的典型连接:
原理图如下:
3.3 电源部分注意事项
1.电池用的是12v航模锂电池,为了防止过放导致电池损坏,必须要在电池输入端加一个电压表模块,如下图:
2.控制部分电源和电机舵机电源分开,因为电机舵机启动时会过大电流,导致电压不稳定,影响芯片供电。这里LM2596给电机供电,一个LM2596给舵机供电,另一个LM2596给单片机和openMV供电。
3.控制电源和电机舵机电源分别加开关,下程序的时候先关闭电机和舵机的电源。因为此时控制器没有给信号,电机和舵机可能会不受控制的运动。
责任编辑:lq
驱动函数总览:
初始化函数:
初始化函数(以TIM8为例):
下面是使用说明: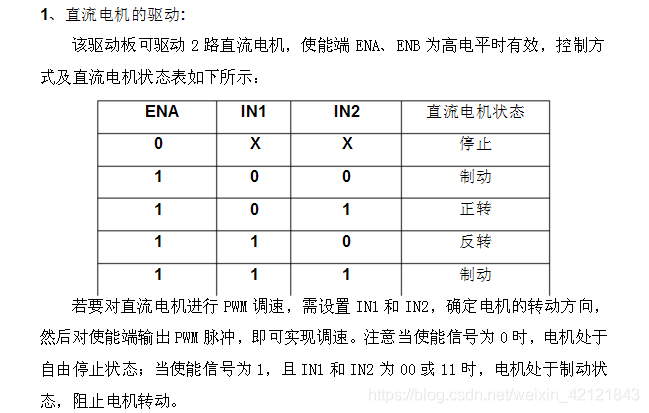
-
STM32
+关注
关注
2270文章
10906浏览量
356489 -
摄像头
+关注
关注
60文章
4849浏览量
95854 -
串口传输
+关注
关注
0文章
33浏览量
1811
原文标题:基于STM32的自动跟踪小车
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
Agv小车能对接哪些自动化设备?最后一个你绝对想不到
AI 自动跟踪云台驱动板解决方案

第13章-循迹功能 STM32智能小车循迹教程 PID循迹算法分析

第16章-超声波跟随功能 基于STM32的三路超声波自动跟随小车 毕业设计 课程设计
19.3-星曈科技 openmv Hopenmv发送五个uchar Openmv+STM32F103C8T6视觉巡线小车 STM32循迹小车系列教程
19.4-STM32接收数据-状态显示在屏幕 openMV寻迹与小车控制 Openmv+STM32F103C8T6视觉巡线小车
20.3-使用两个通道进行电磁循迹 智能车竞赛 电磁杆原理图 电磁循迹小车 STM32电磁小车 电磁循迹算法

20.2-电磁杆在磁轨道的测试 零基础入门智能车竞赛 STM32电磁小车

有什么模块或系统可以实现频率的自动跟踪?
第七章-V1.5 STM32超声波测距STM32F103C8t6超声波避障小车 超声波避障模块 STM32超声波测距

焊缝跟踪技术:实现高效、精确的焊接自动化





 工商网监
工商网监
评论