 一文汇总SIMO雷达的基础基础知识
一文汇总SIMO雷达的基础基础知识
雷达主要用于探测并定位目标,它通过发射特定种类的波形,对回波信号进行检测,从而达到探测目标的目的。通过对雷达进行设计,能够使其穿透一些极端条件,例如黑暗,薄雾,烟雾,雨水,降雪等,这些往往都是人的视线无法看到的。雷达还具有能够测量目标距离和速度等参数的优点。
雷达在军事、民用和科技等领域均有广泛运用,例如用于大气监测,地表探测,跟踪和导航,天气监测,地球观测等。
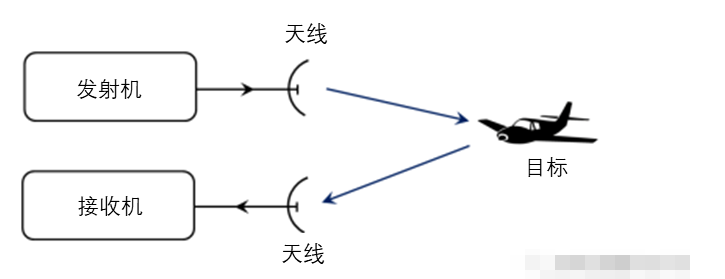
图1 基本雷达构成的框图
图1示出了一种基本的雷达构成:一个发射电磁波的发射天线,一根接收天线以及处理数据并发现目标的器件。发射信号的一部分被目标截获并向所有方向再次辐射出去,接收天线将返回的电磁能量收集起来,发送给下一级的接收机,接收机对数据进行处理,从而发现目标,同时提取目标的相关参数。
尽管合适的电磁波调制方式有很多,大多数雷达还是采用了脉冲调制的信号来满足对目标的探测与定位。
雷达信号包含的信息
距离
如图2所示,雷达与目标之间的距离用r表示,它可以通过电磁波在雷达与目标之间的双重传播延时经下式计算得出:
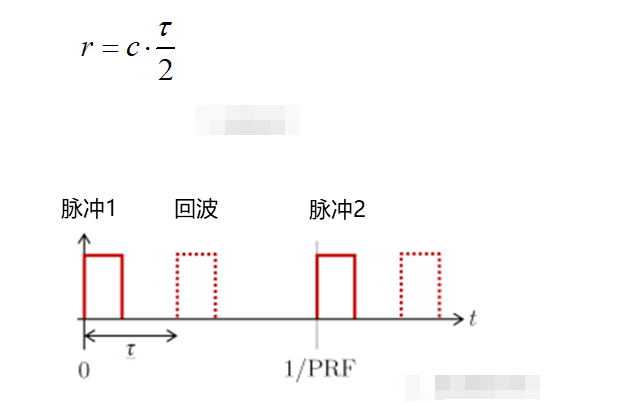
图2 雷达脉冲传播的示意图
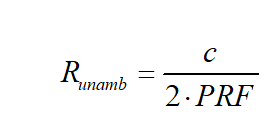
信号的传播速度通常对应光速c。系统的最大不模糊距离受脉冲重复频率的限制:
系统的距离分辨率,即两个相邻目标的最小可分辨距离,与信号带宽成反比。
速度
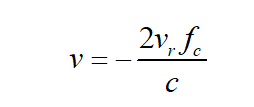
由于多普勒效应的存在,目标相对于雷达的径向速度 会使得接收到的信号产生一个相移,表现为接收信号的频移:,其中为信号载频。
方向(方位向或俯仰向)
通过使天线形成特定的方向图,能够在每一时刻都将发射功率集中在某个特定方向上。因此,雷达天线波束的指向给出了该角度上目标的信息。这个角度可以是方位向(雷达与目标连线在水平面上投影的角度)和/或俯仰向(雷达与目标连线与水平面之间的角度)。
极化
极化雷达具有估计接收信号极化方式(水平极化,垂直极化,圆极化等)的能力。这使得雷达系统提供了诸如确定和/或区分环境(植被,建筑等)中不同种类结构的可能性。实际上,取决于被照射物体的材料和几何形状,接收信号的极化会受到不同的影响。
SIMO单输入多输出雷达
SIMO雷达的发射天线通常是阵列天线,由若干个独立的阵元组成,需要对这些阵元进行合适的排布,使其间距等于载波波长或等于载波波长的一半。通过对每个阵元的激励信号的相对幅度和相位进行独立地调控,当所有阵元同时发射时,就能够获得期望的辐射方向图(例如笔型波束,宽波束)。这种天线被称作相控阵天线。
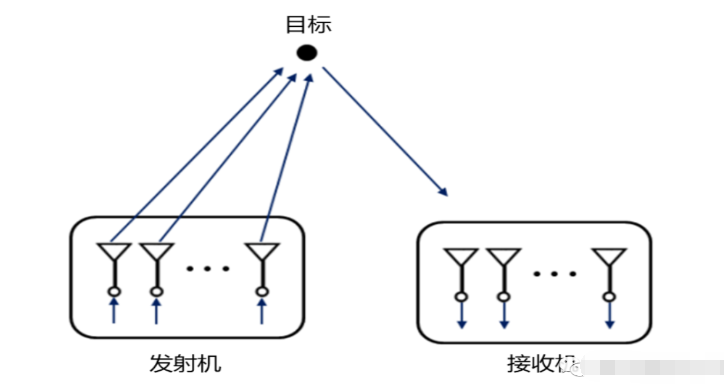
欲使阵列天线的波束对空间进行扫描,可以采用使整个阵列天线所在机械结构转动的方式。然而,通过改变天线阵元之间激励电流的相对相位的方式对波束指向进行操控,能够更方便地使波束指向特定的方向。
传统的相控阵雷达只能发射固定的波形,而只在幅度上做文章(放大或缩小其幅度)。由于只发射单一的波形——尽管有多个发射阵元——相控阵雷达也被称作SIMO(单输入多输出)雷达。
在接收中采用阵列天线的情况下,天线的方向性可以通过数字波束形成(DBF)技术形成,这包括以数字方式形成多个同时聚焦的波束。
雷达探测
典型的用于探测传统飞行器的雷达发射的信号通常具有几微秒的脉冲宽度和几百Hz的脉冲重复频率。发射机产生调制后的射频脉冲,经过传输线到达天线,由天线将脉冲信号辐射到空间中。
辐射能量的一部分经由目标反射回来,被雷达接收机捕获。接收到的信号在前端进行预处理,典型的雷达前端由如下几部分构成:低噪声放大器和滤波器,下变频器和模数转换器(对模拟信号进行采样和量化)。
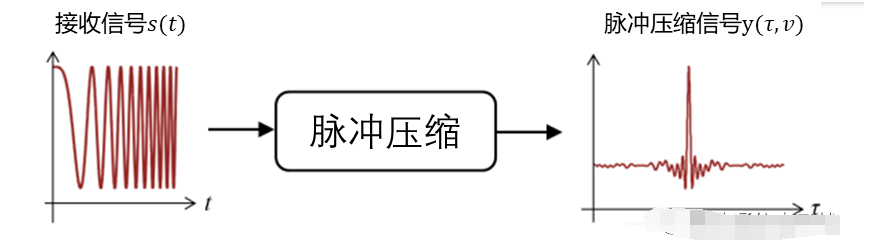
图3 脉冲压缩示意图
为了从含有噪声的回波信号中检测出目标的存在,必须要对信号中目标的反射信号和噪声进行区分,这就是信号处理中脉冲压缩阶段的目的,此阶段采用匹配滤波器(MF)对发射脉冲进行匹配。如图3所示,匹配滤波器的输出是接收信号和发射信号的互相关函数,可以用下式表示:

目标的距离参数可以从脉冲的传播延时(“快时间”)中直接估计,速度参数通常从脉冲间(“慢时间”)的相位变化进行估计。目标的方位信息通过天线的指向进行估计,其精度取决于天线的方向性的好坏。
需要注意的是,雷达前端的性能会受限于噪声,因为杂波的电磁能量会大幅影响接收机检测期望的回波信号的能力。这些杂波可能产生于接收机的内部,也可能叠加在期望的回波信号上,由接收天线一起接收到。
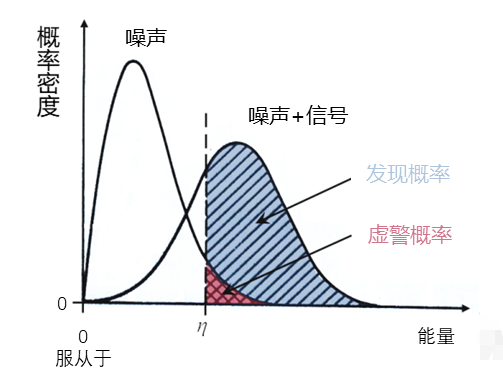
图4 噪声的概率密度函数、噪声和信号混叠时的概率密度函数
为了判断是否有目标存在,需要在匹配滤波器的输出端设置一个检测阈值,当脉冲压缩后的能量超过了阈值,则认为有目标存在。阈值的设置需要在虚警概率(噪声通过匹配滤波器后,输出能量超过阈值的概率)和发现概率(目标存在时,匹配滤波器的输出能量超过阈值的概率)之间做一个权衡。如图4所示,较小的阈值选取能够增加检测概率并且降低虚警概率,反之亦然。
责任编辑人:CC
-
雷达
+关注
关注
50文章
2986浏览量
118402 -
SIMO
+关注
关注
0文章
10浏览量
4508
发布评论请先 登录
相关推荐
电镀的基础知识汇总
一文汇总PMR的基础知识







 工商网监
工商网监
评论