 香港中文大学开发出“FreeBOT”球形机器人
香港中文大学开发出“FreeBOT”球形机器人
香港中文大学的研究团队开发了“FreeBOT”球形机器人,其大小比垒球略大,可以在平面上滚动并在墙壁和斜坡上攀爬。机器人彼此粘在一起,也可以彼此分开,并共同创造各种形状和动作。
FreeBOT模块是一个内部装有磁铁的球形机器人,它由两部分组成:磁铁球形壳体和内部驱动机构。内部驱动机构有两个轮子,并由两个直流电动机通过齿轮驱动。内轮在球壳中的位置通过电机控制,并且独立在平面上滚动。强大的内部磁体允许在铁磁壁上垂直移动。
原型的内部结构
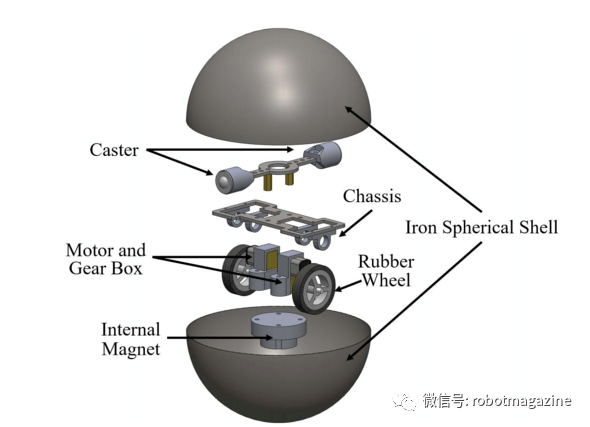
FreeBOT的分解图
FreeBOT内部磁铁很小,但是会产生很强的外部磁场。它集成了其他模块,以便被磁场吸引,甚至在集成后也沿模块移动。由于几乎整个模块都是接触点,集成机器人组可以各种形状移动。例如,两个机器人可以一起工作以攀登非铁磁纸板台阶,或攀登其他模块(例如梯子)。
原文标题:一组球形协作移动的机器人“Free BOT”
文章出处:【微信公众号:机器人技术与应用】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28445浏览量
207233
原文标题:一组球形协作移动的机器人“Free BOT”
文章出处:【微信号:robotmagazine,微信公众号:机器人技术与应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
需要专业程序员进行繁琐的编程工作,这种方式不仅效率低下,还限制了机器人的应用场景。例如,在我们大学工程实训课程中使用的数控机床,需要人为设定起点、终点、移动方向和移动距离等参数,自动化程度非常有限。而
发表于 12-29 23:04
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
的进步。自2000年中国国防科技大学研制出国内第一台仿人型具身智能机器人“先行者”以来,国内在该领域的研究与开发工作逐渐加速。
“先行者”机器人
发表于 12-28 21:12
OpenAI探索人形机器人开发
前解散的内部机器人软件团队。 这一系列的举措表明,OpenAI正在加大对机器人技术的投入,并寻求在这一领域取得突破。据两名直接了解讨论的人士透露,OpenAI最近甚至考虑开发一种类人机器人
【「具身智能机器人系统」阅读体验】+初品的体验
的快速发展,相关人才的需求也在不断增加,通过阅读该书可以帮助大家系统性地了解和分析当前具身智能机器人系统的发展现状和前沿研究,为未来的研究和开发工作提供指导。此外,本书还可以为研究人员和工程师提供具体
发表于 12-20 19:17
ROSCon China 2024 | RDK第一本教材来了!地瓜机器人与古月居发布新书《ROS 2智能机器人开发实践》
手古月居共同推出首本基于RDK机器人开发者套件的教材——《ROS 2智能机器人开发实践》。该书由地平线创始人&CEO余凯博士和华东师范
发表于 12-10 10:56
•184次阅读
普渡机器人与香港特区政府签约成为重点企业伙伴
近日,香港特区政府引进重点企业办公室(引进办)举办第三批重点企业伙伴签约仪式。在香港特别行政区财政司司长陈茂波见证下,普渡机器人作为全球服务机器人行业的领军企业,正式成为
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
。
ROS系统主要特点有哪些
(1) 提供丰富的机器人算法库
机器人的各种控制以及通信离不开算法库的支持,ROS系统提供丰富且功能强大的机器人算法库,如坐标变换、运动控制等。机器人
发表于 07-09 11:38
Al大模型机器人
金航标kinghelm萨科微slkor总经理宋仕强介绍说,萨科微Al大模型机器人有哪些的优势?萨科微AI大模型机器人由清华大学毕业的天才少年N博士和王博士团队开发,与同行相比具有许多优
发表于 07-05 08:52
普渡机器人宣布将于香港成立全球研发中心与国际运营总部
6月28日,在由香港科技园公司(HKSTP)举办的“先进制造重点企业意向书签署”仪式上,全球服务机器人领导者普渡机器人正式宣布将在香港成立全球研发中心与国际运营总部并将入驻

abb工业机器人的编程语言是什么
编程而设计。RAPID语言具有易学易用、功能强大、灵活性高等特点,广泛应用于ABB工业机器人的编程和应用开发。 ABB工业机器人编程语言RAPID概述 RAPID语言简介 RAPID是一种专门为工业
全球机器人开发领域采用NVIDIA 机器人开发和生产
比亚迪电子、西门子、泰瑞达和 Alphabet 旗下公司 Intrinsic 采用 NVIDIA Isaac 机器人平台开发自主机械臂、人形机器人和移动机器人 NVIDIA 于今日
北航成功研发微尺寸仿生机器人——昆虫机器人
据中央电视台报道,北京航空航天大学科研团队历经15年,成功研发出微尺寸仿生机器——“昆虫”机器人。这款机器人设计灵感源于蟑螂,外形如同硬币,
香港中文大学教授、IEEE Fellow邢国良出任国科微AI首席科学家
4月22日,国科微宣布正式聘任国际顶级AI专家香港中文大学教授、IEEE Fellow邢国良先生为国科微AI首席科学家,以进一步加强公司在AI边缘领域的技术探索,加快AI赛道商业部署。 邢国良教授

从"精益思想"看机器人的开发与应用:一场科技与效率的完美融合
,为我们的机器人开发提供了一种全新的思路。 "精益思想"源自于精益生产,它强调以最少的投入,创造最大的价值。在机器人开发中,我们同样需要运用这种思想,以最少的资源,





 工商网监
工商网监
评论