 利用ROS控制UR机器人可使用新版操作系统
利用ROS控制UR机器人可使用新版操作系统
现在,利用ROS控制UR机器人的程序员可以使用新版本的机器人操作系统(ROS)。这个新的ROS版本提供了对机器人的笛卡尔控制,同时保持了机器人关节的安全速度,以避免超出安全的协作控制限制。
UR手臂的笛卡尔控制复杂性要求将单个机器人关节运动的计算结果保持在定义协作机器人的安全操作范围之内。另外,特定的运动也可能会让手臂通过“奇点”,在这个“奇点”,手臂需要改变其姿态,以保持工具末端在所需的轨迹上。这也可以诱导非常高速的关节运动,但将超过协作机器人的规格。
为了安全地执行此操作,ROS必须了解UR臂的运动学,协作机器人的约束条件以及笛卡尔运动的要求。在此版本之前,ROS尚未提供用于UR机器人的笛卡尔控制的正式解决方案。但是,此新版本可用于Beta测试,并且ROS社区正在收集真实用例来测试该功能。
以下是该版本的功能集:
适用于所有CB3(软件版本》 = 3.7)和e-Series(软件版本》 = 5.1)机器人,并尽可能使用RTDE接口进行通信。
ROS内置机器人的出厂校准,可以精确地达到笛卡尔目标。
实时通信结构,可以很好地应对e-Series的2ms周期时间。
示教器的透明集成。使用URCaps系统,处理从ROS端发送的控制命令。这样,无需重新启动ROS驱动程序就可以暂停、停止和恢复机器人。将来,这还将使ROS组件能够用于示教器上更复杂的UR程序的一部分。可以使用服务调用退出机器人的ROS控制,以继续在TP上执行程序。
使用机器人的速度缩放功能。当由于安全限制而启用速度缩放或使用速度滑块时,这会在ROS端得到正确处理,并相应地减慢轨迹执行的速度。
如果需要的话,使用UR机器人可以对大多数日常的TP交互进行基于ROS服务的替换,而无需与示教器进行交互。可以使用ROS服务和操作调用来启动、停止机器人,甚至可以从安全事件中恢复机器人。
测试功能:在应用程序中启用笛卡尔轨迹控制。使用新的笛卡尔轨迹界面和新的笛卡尔轨迹控制器在任务空间中指定航点。
测试功能:对直角轨迹和基于关节的轨迹都使用机器人内插。如果应用程序不能满足驱动程序的实时要求,这将非常有帮助。
原文标题:UR笛卡尔驱动程序可用于ROS
文章出处:【微信公众号:机器人技术与应用】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
驱动
+关注
关注
12文章
1840浏览量
85296
原文标题:UR笛卡尔驱动程序可用于ROS
文章出处:【微信号:robotmagazine,微信公众号:机器人技术与应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】+初品的体验
ROSCon China 2024 | RDK第一本教材来了!地瓜机器人与古月居发布新书《ROS 2智能机器人开发实践》

ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!

国产Cortex-A55人工智能教学实验箱_基于Python机械臂跳舞实验案例分享
简述工业机器人控制系统的特点
机器人控制系统的基本单元有哪些
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
基于飞凌嵌入式RK3568J核心板的工业机器人控制器应用方案
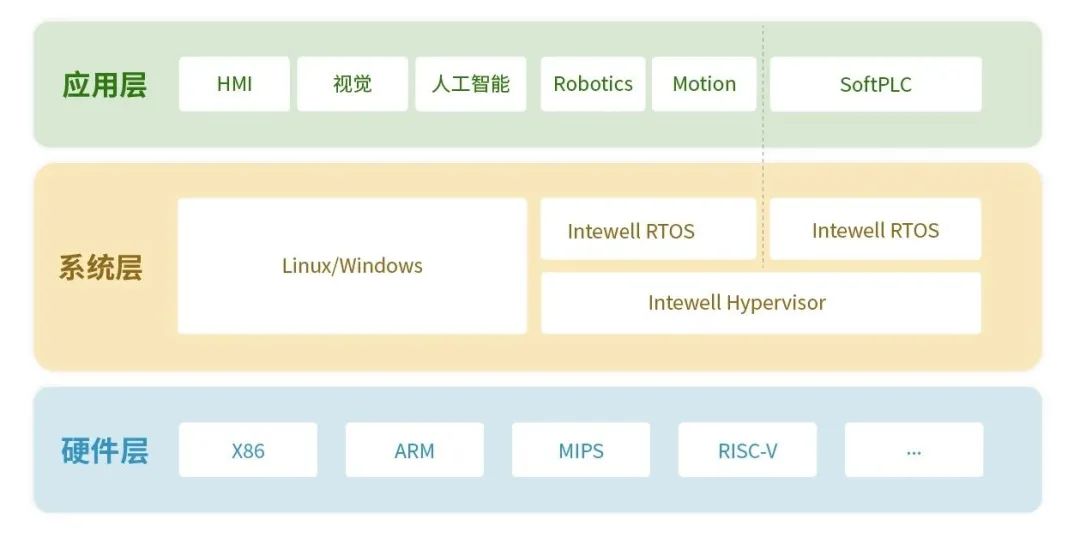
基于鸿道(Intewell®)操作系统研发的农业机器人操作系统
技术融合与创新大象机器人水星Mercury X1人形机器人案例研究!
实现机器人操作系统——ADI Trinamic电机控制器ROS1驱动程序简介

工业控制:鸿道(Intewell)操作系统工业机器人控制解决方案
移动机器人与ROS操作系统原理与应用





 工商网监
工商网监
评论