 全面剖析索尼第一辆电动车Vision-S
全面剖析索尼第一辆电动车Vision-S

索尼第一辆电动车Vision-S在欧洲路测
底盘和车身方面,索尼主要采用了博世和本特勒联合开发的电动汽车驱动系统2.0。麦格纳负责制造,在奥地利生产。未来即使量产,主产地应该也在奥地利,因为麦格纳整车生产基地主要就是在奥地利,中国土豪钟爱的奔驰大G、宝马MINI COUNTRYMAN(R60)、宝马5系(G01)、捷豹E-PACE、捷豹I-PACE、宝马与丰田联手打造的新一代Z4与Supra、Jeep大切诺基、奔驰M级、宝马X3、阿斯顿·马丁Rapide都是麦格纳代工的,这个号称汽车制造界的富士康工厂便是位于奥地利格拉茨的麦格纳斯太尔工厂。麦格纳斯太尔前身是斯太尔-戴姆勒-普赫,曾经是奔驰控股公司,1998年被麦格纳买下。顺便说一句,斯太尔的枪械也是很出名的,STG-77是最常见的突击步枪。

索尼一开始就是奔着量产车而来的,如果只是概念车,完全不必劳驾麦格纳,博世和本特勒可以轻松完成概念车。麦格纳斯太尔也从不为人打造概念车,麦格纳斯太尔就是代工厂。
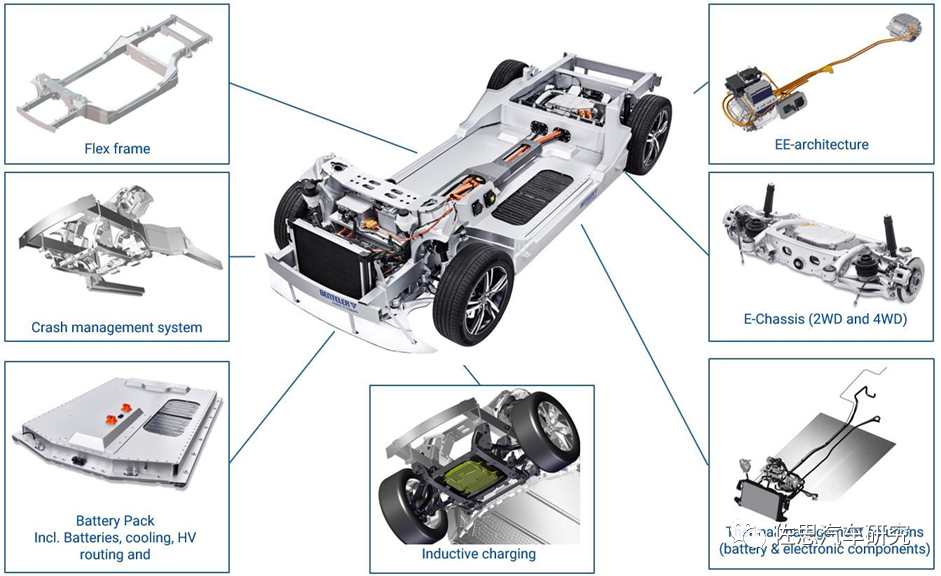
博世与本特勒的电动汽车2.0包括了底盘、基础的E/E架构、博世的三合一电驱动、电池Pack系统、热管理系统、感应充电、车架、撞击管理系统。
柔性框架上的车身具备高扩展性,能覆盖从B级车到E级车的大部分车型,轻量化、可扩展的车架,采用挤压铝型材,可根据不同车型和车身,灵活调整长度和宽度,通过冷连接(无需焊接)技术,是实现高扭转刚度和最佳碰撞性能的基础。
模块化的电池包解决方案,具备出色的能量密度和安全性,该设计能抵抗所有碰撞形式及满足相关法规要求,采用铝制型材车架结构,灵活可扩展,集成式电池冷却,保持电池最佳性能,延长电池寿命。
集成式碰撞管理满足最严格的安全法规要求,专为纯电动汽车优化的轻量化碰撞设计,新吸能部件为电池系统提供更好的保护,碰撞管理系统满足侧面柱碰撞和前端侧角碰撞要求。
模块化电动汽车前/后桥,打造最佳驾乘体验和操纵性,前后悬架模块搭配高度集成式电动驱动单元,得益于型材在纵向和横向的剖面长度,副车架具备模块化属性,每个副车架都考虑了NVH要求 (噪声,振动,声振粗糙度)—优化的橡胶衬套概念,经隔音处理的副车架和附加的电子驱动单元,实现最佳NVH性能。
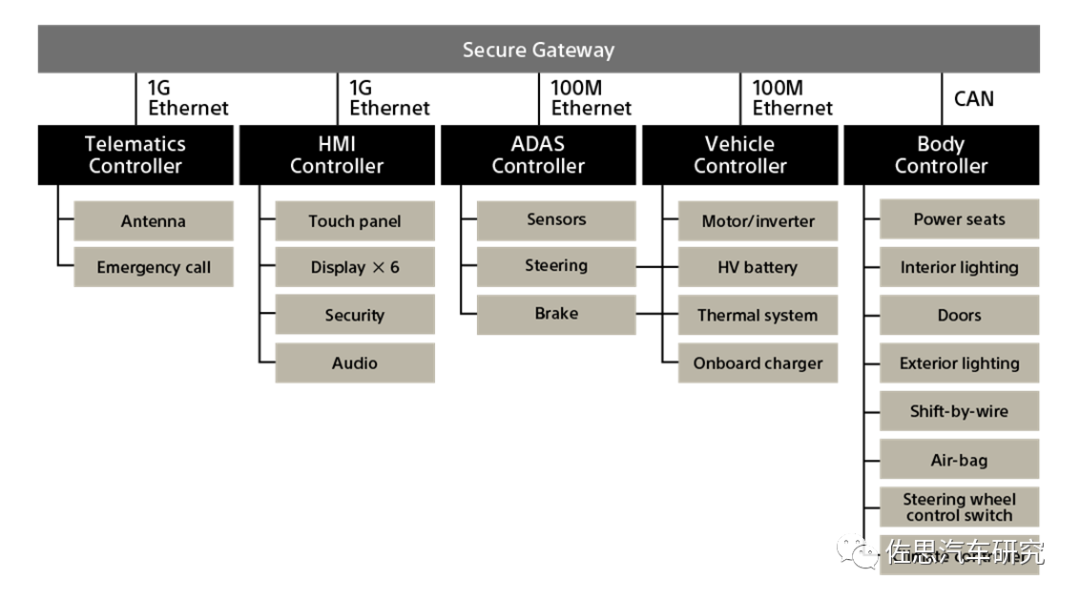
电子架构由博世提供,是博世先进的Zonal架构,远比特斯拉的传统架构要先进。
自动驾驶方面,索尼Vision-S有40个传感器,包括18个摄像头,6个毫米波雷达、12个超声波雷达和4个激光雷达。

18个摄像头中共有三个型号,分别是230万像素的IMX390、540万像素的IMX490和30万像素的ToF IMX456。IMX490性能优异,EMVA标准下动态范围可达140分贝,是目前动态范围最广的摄像头,还达到了ASIL-D级功能安全,也是首个取得ASIL-D级的摄像头,能够祛除LED频闪。AD10比特精度可达40帧每秒,12比特可达30帧每秒,像素分辨率2896*1876。对比200万像素,明显提高了FOV。
在摄像头解串行方面,索尼不必求助美信的GMSL或德州仪器的FPD-LINK,索尼自己有类似的技术,即GVIF。
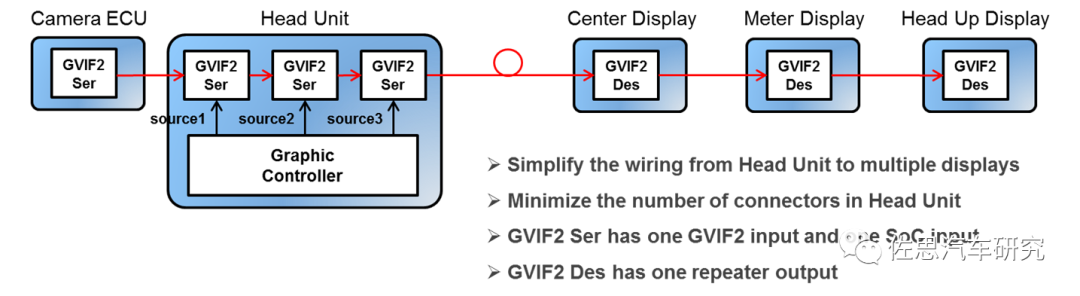
日本丰田特别是雷克萨斯也是使用索尼的GVIF芯片,日本企业一贯喜欢垂直供应链,能自己做的绝不假手他人,而中国和欧美企业则相反,能采购的一定从外采购,绝不自己做。GVIF2中的CXD4960ER-W、CXD4961ER-W、CXD4962ER-W、CXD4963ER-W、CXD4960GG-W、CXD4963GG可以支持4百万像素60帧每秒,因此支持索尼汽车的540万像素40帧每秒是没有问题的。
索尼半导体为索尼汽车提供解串行芯片外,还有音频CODEC、4G、蓝牙、WLAN通讯模块,也为索尼汽车上的AR-HUD提供PGU和全息光波导光机。索尼半导体还能生产激光二极管,也拥有MEMS晶圆厂。此外索尼参股的JDI能提供索尼汽车所需要的所有显示屏。
索尼的主视觉处理器应该是瑞萨的R-CAR V3U,因为它有针对双目的硬线对应。日本企业、奔驰和博世是双目的死忠,即便激光雷达大量普及,也会坚持使用立体双目摄像头,并且会是主传感器。立体双目在像素密度、帧率、功耗、体积、技术成熟度、有效距离方面仍然超过激光雷达。
索尼的540万像素双目在HFOV40度情况下有效距离可轻松达到300米,每秒40帧,通常机械激光雷达的帧率与水平角分辨率是矛盾的,帧率越高,角分辨率越低,传统机械激光雷达的帧率在5-20Hz之间可调,一般默认是10Hz,意味着0.1秒的延迟无法避免。性能最强的Luminar的帧率默认也是10Hz,索尼的摄像头是其4倍帧率,延迟减少了很多。
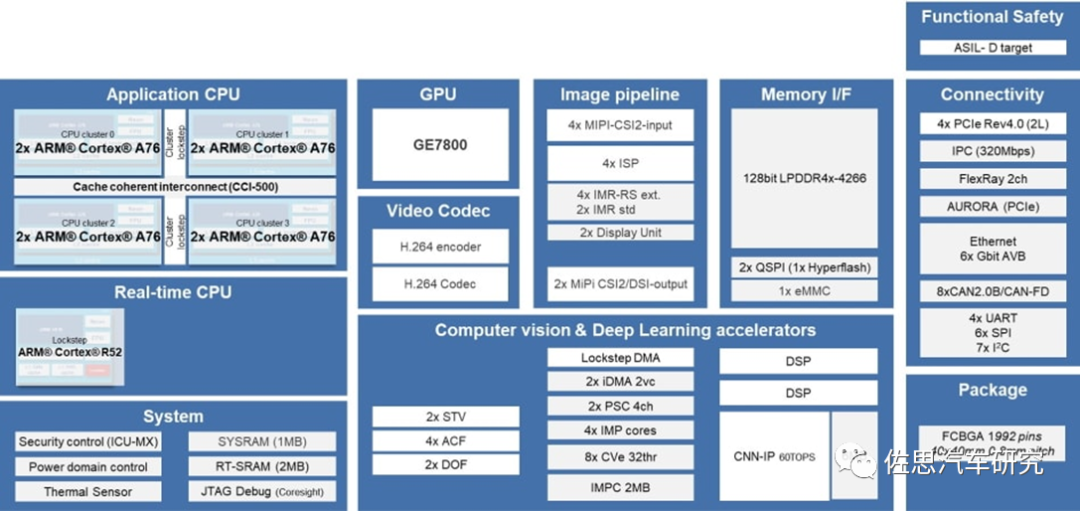
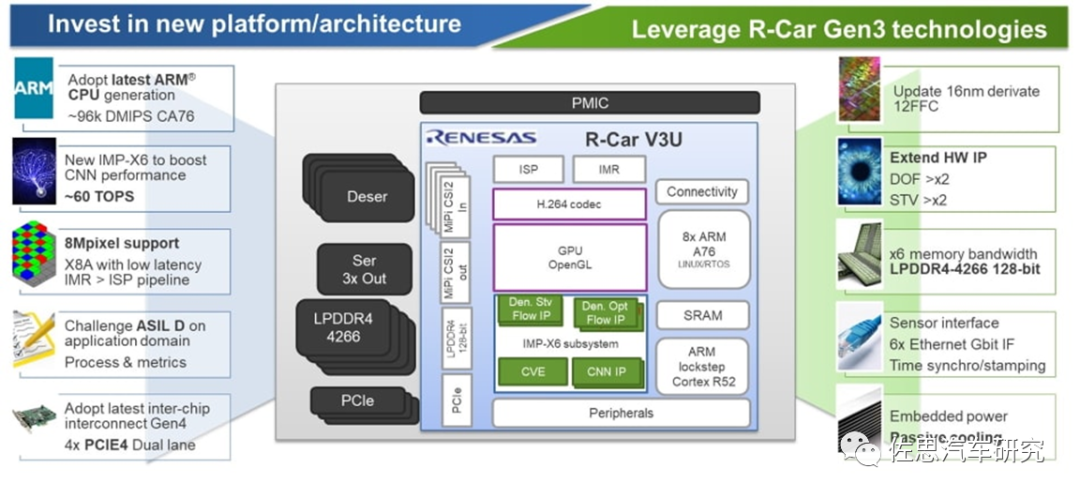
四大自动驾驶芯片厂家只有瑞萨的主业是汽车半导体,因此对车规安全重视程度最高,目标是ASIL-D级。V3U内部框架如上图,采用8核A76设计,但也不是像特斯拉那样简单堆12个A72,它使用了ARM的Corelink CCI-500,即Cache一致性互联。它提供处理器集群之间的完整Cache一致性,比如 Cortex-A76 和 Cortex-A55,而且可以实现 Big.LITTLE 处理。它还可为其他的设备(如 Mali GPU、网络接口和加速器)提供I/O一致性。实时锁步CPU是ARM的R52。
V3U视觉管线如上图,可以看到V3U有很多硬核计算机视觉模块,包括立体双目视差,稠密光流、CNN、DOF、STV、ACF等。功能方面包括图像格式化、目标追踪、车道检测、自由空间深度、场景标注、语义分割、检测分类等都具备,类似于Mobileye的全封闭算法了。
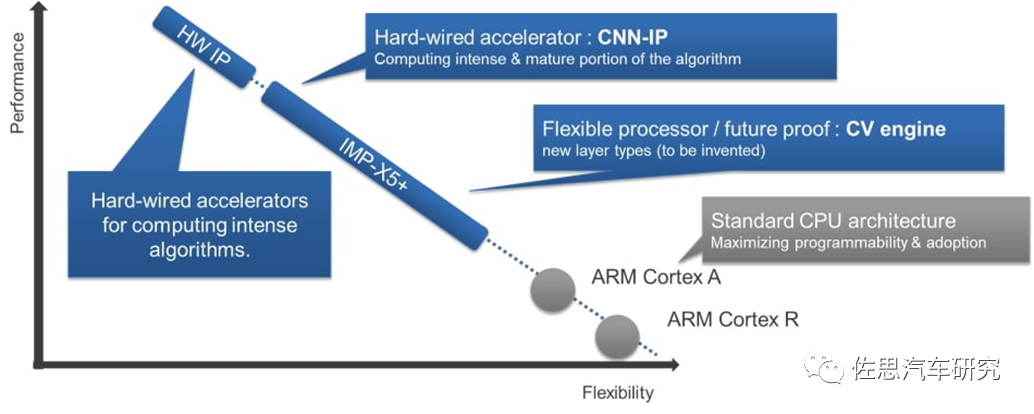
图像处理主要还是IMP-X5+,灵活性应该比Mobileye还是要高点。因为针对性比较强,也为了节约成本,降低功耗,瑞萨没有使用太昂贵的GPU,只是简单增加了一个低功耗GPU,即Imagination Technologies的PowerVR GE7400,1个着色器集群+32个ALU核心,算力只有38.4GFLOPS@600MHz。
考虑到成本因素,瑞萨没有使用尖端的7纳米,而是12纳米工艺,并且是从原瑞萨R-CAR H3的16纳米FinFET工艺升级到12纳米FFC工艺,一次性支出很少。但是论到AI性能,丝毫不次于那些5纳米芯片,瑞萨声称V3U达到了惊人的13.8TOPS/W的能效比,是顶配EyeQ6的6倍之多。 环视和侧视这些视觉处理关系不大,索尼可能使用了英伟达的Xavier,当然至少需要两片。
索尼的电子倒车镜上有多达4个摄像头。
保险杆下方就是激光雷达,索尼完全有能力自制激光雷达,并且是先进程度不次于任何一家激光雷达厂家,因为Flash激光雷达本质上就是个ToF相机,索尼的ToF传感器优势明显,做激光雷达更是手到擒来,易如反掌。从外型上看,这个激光雷达就是Flash激光雷达。
上图为全球第二大ToF传感器厂家意法半导体对ToF相机原理的解释。
上图为知名Flash激光雷达厂家Ouster的产品实物,就是一个放大版的ToF相机,只是光学镜头远比手机用的ToF相机要大。 现在Flash激光雷达厂家用的SPAD阵列像素大约只有1-2万,而索尼的试验产品,已经达到120万像素,是传统Flash激光雷达的100倍。需要指出,SPAD阵列只是检测光反射部分,可以用于任何类型的激光雷达,只是目前Flash激光雷达必须用SPAD阵列。
在2021年2月13日,索尼发布了堆叠型直接ToF传感器,也就是SPAD阵列,这是索尼针对汽车用激光雷达发布的首个产品。
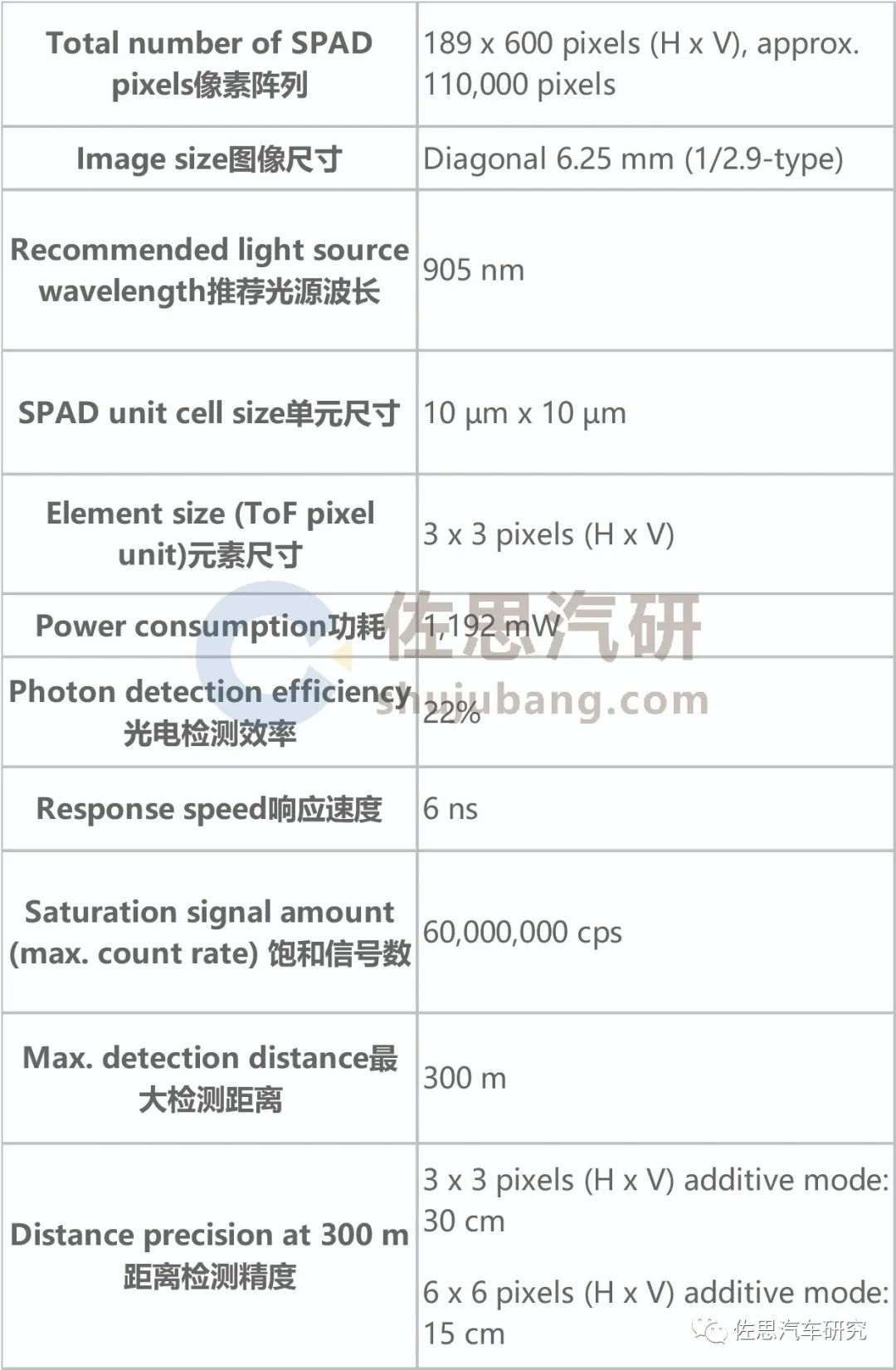
它最强大的地方是最大有效距离高达300米,通常Flash激光雷达是30-50米,当然这和Flash用的VCSEL功率密度低也有关系,提高VCSEL功率密度可以将有效距离增加到200米,但成本增加十几倍。
索尼Vision-S的座舱与本田e电动车座舱几乎没有区别。但屏幕要更大,两边的屏幕可能是15英寸,中间的可能是12英寸。两边的屏幕分辨率可能是2100*900。后排还有两个10.1英寸屏幕。
可以任意在几个屏幕间拖动,包括后排屏幕。 副驾驶处的屏幕可无线连接索尼Playstation,将游戏机画面投射上去。
ToF深度相机一个用来监测驾驶员的身体动作,判断驾驶员的健康状况。
最令人称奇的另一个ToF深度相机能够识别唇语,当然索尼Vision S的座舱也能语音识别。
这样配合传统的语音识别,准确率会更高,当然目前可能只能针对日语和英语。 索尼计划在2021年3月28日推出基于Vision S的量产原型车,按日本厂家的一贯风格,概念车与量产车几乎没有多少差别,让我们拭目以待吧。
编辑:jq
-
索尼
+关注
关注
18文章
3706浏览量
107658 -
纯电动车
+关注
关注
0文章
162浏览量
15190
原文标题:索尼第一辆电动车Vision-S全面剖析
文章出处:【微信号:zuosiqiche,微信公众号:佐思汽车研究】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
RFID电动车智能管控系统:从“人管车”走向“数据驱动治理”
电动车NFC一键启动(仪表总成、电源锁)_Ci522
惠海 H6261S 8-150V降压IC 电动车控制器降压恒压芯片供电方案
超高速读写 电动车无钥匙解锁方案芯片DP1323EL
电动机与发电机如何在行驶与发电之间切换

基于DP1323EL的电动车解锁方案:超高速读写,提升电动车一键解锁体验
索尼4K超高清转播车交付儋州广播电视台
产品推荐 | MOS管在电动车控制器上的应用

霍尔IC在电动车调速转把中的应用与原理
基于切换函数的电动车驱动滑模控制研究
霍尔IC在电动车调速转把中的应用与原理
双电机独立驱动电动车电子差速技术
科普|一辆应急指挥车由哪些子系统构成




评论