 面对进入自动驾驶仿真的IT巨头,PTV VISSIM还有优势吗?
面对进入自动驾驶仿真的IT巨头,PTV VISSIM还有优势吗?
自动驾驶仿真的重要性不言而喻,百度、腾讯、华为、WAYMO等巨头都已经投入研发。
传统意义上,汽车仿真和交通仿真是分开研究的。在自动驾驶时代(或智能网联汽车时代),由于逐步实现车辆联网、车车通信、车路协同、万物互联,汽车仿真和交通仿真需要越来越多的协同和融合。
通过在拥有丰富的不同道路使用者之间交互的模拟交通流中进行训练,自动驾驶汽车才能获得在复杂的城市环境中处理复杂交通条件的能力。交通流仿真又分为宏观交通仿真,微观交通仿真等。宏观交通仿真是模拟大规模路网运行能力和状况的有效工具,一般比较适合应用交通管理措施评估的场景,以及自动驾驶车辆将来用于出行服务方面的研究。对于自动驾驶车辆的验证,目前微观交通仿真的手段用的多。微观交通仿真的目的是描述特定的车辆行为,因此可以用来模拟连续车道和交叉路口的交通情况。微观交通仿真对于自动驾驶尤其重要。
自动驾驶仿真产业链可以简单分类如下图:
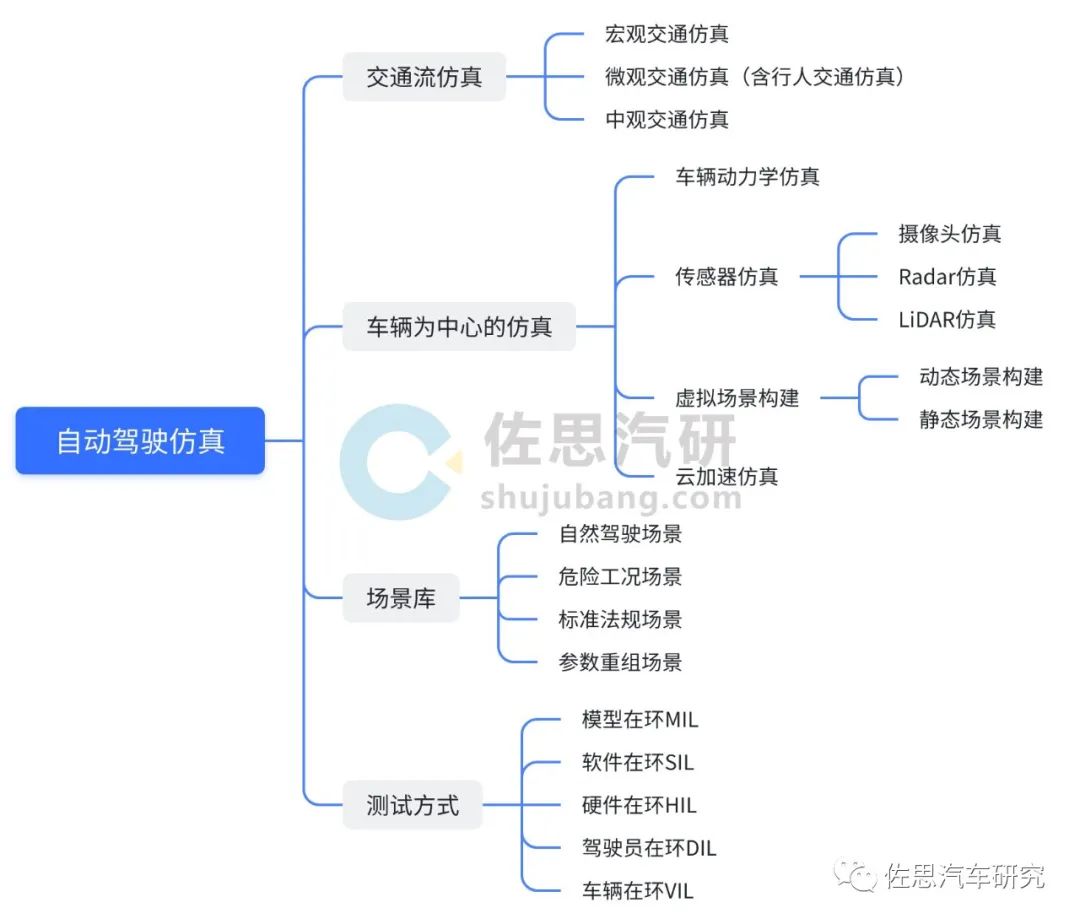
来源:佐思汽研
上图的每个节点,都有若干的企业或机构在进行研究,从而构成庞大的产业链。深入分析自动驾驶仿真产业链,佐思汽研发现并存着两种模式:一种是一体化仿真,另一种是联合仿真。一体化仿真是指巨头企业利用资金实力(自研或并购)打通产业链,形成尽量独立且全面的仿真能力;而联合仿真则是不同仿真企业之间紧密合作,通过产品对接,联合实现仿真任务。
由于汽车和交通仿真的复杂性,传统仿真企业基本都是独立研发某一子系统(或软件模块),然后相互之间开放接口,最终以联合仿真的模式实现某个仿真项目。如多数传感器仿真软件,都能实现与车辆动力学仿真软件 CarSim、CarMaker、VeDYNA 的兼容对接。 欧洲CoExist项目也是联合仿真的案例之一。CoExist项目由来自7个国家的15个合作方组成,包括德国PTV Group、法国VEDECOM、Renault,西门子TASS和斯图加特大学等。
下图是项目的工作流程:
CoExist项目的联合仿真是在VEDECOM控制逻辑,西门子的Prescan软件和微观仿真软件PTV Vissim之间实现的对接运行。其中的场地数据是在海尔蒙德市的测试道路上结合实际交通环境下采集得到,并进一步分析数据和自动驾驶的跟车行为特性。
随着ANSYS,西门子等传统仿真巨头通过收购,腾讯、百度、华为等新兴IT巨头依靠庞大的资金实力,业务几乎涵盖了车辆及传感器仿真,交通流仿真和场景库建设。那么,专注于某一环节的仿真企业如何在自动驾驶发展浪潮中保持自身优势呢?佐思汽研和擅长交通流仿真的PTV Group 中国区总经理沈畅进行了交流。
微观交通仿真的领先者PTV集团
德国PTV集团成立于1979年,总部设在德国的卡尔斯鲁厄尔市。经过40多年的发展,已经在美国、法国、瑞士、荷兰、比利时、澳大利亚、新加坡、阿联酋、中国等地设立了分公司。其软件和技术在世界上被广泛应用,全球的用户达到5500个,分布在127个国家,在中国有超过550位客户,客户主要来自交通行业,如设计院、政府、交警、大学等。近两年随着自动驾驶的发展,开始有一些汽车相关客户。
从2017年开始,保时捷汽车控股公司最终以3亿多欧元收购了PTV集团100%的股份。PTV Group被收购了以后,仍然保持独立运营,全球大概有900名员工,分布在五大洲,大概有28家公司。
VISSIM是 PTV 公司提供的一款世界领先的微观交通流仿真软件。VISSIM可以方便的构建各种复杂的交通环境,包括大型环岛,停车场等,也可以在一个仿真场景中模拟包括机动车,卡车,有轨交通和行人的交互行为。 VISSIM的仿真可以达到很高的精度,包括微观的个体跟驰行为和变道行为,以及群体的合作和冲突。自1992年进入市场以来,VISSIM 已经成为最流行的交通流仿真软件之一,其投入的深入研发力量和世界范围内的大批用户保证了VISSIM 在同类软件中处于领先地位。
PTV VISSIM在自动驾驶领域支持联合仿真,联合仿真可以是车辆通讯软件跟VISSIM进行对接,也可以是车辆调度软件、车辆感知软件、汽车动力学软件和VISSIM对接。无人驾驶算法通过接入 VISSIM的方式,使用模拟的高动态交通环境进行仿真测试。
近十年来, VISSIM软件在全球研究自动驾驶技术的汽车厂商里得到了广泛的应用,尤其是在日本汽车企业中。近年,随着中国汽车企业、互联网企业以及出行科技公司在自动驾驶领域研究的深入, VISSIM在自动驾驶方面的应用也在逐渐扩大。 根据智能交通前沿科技《微观交通仿真软件分析比较》文章中的分析, VISSIM具备明显竞争优势。因此, VISSIM我国应用广泛, VISSIM已成为国内最流行的微观交通仿真软件,也成为国内仿真平台必选的仿真核心软件。
相对于其他自动驾驶仿真系统,PTV的软件具有如下领先优势:
01
整合小汽车、公交车、货车、自行车、电动车、摩托车和行人等交通参与者
在现实生活里的交通世界是复杂多样的,道路上交通参与者种类众多,有小汽车、公共汽车、货车、自行车、电动车、摩托车和行人这些不同的交通工具或交通方式。VISSIM 软件里可以放在同一个工具里进行整合仿真,每个仿真步长,车和车之间,车和人之间都有相互关系。
VISSIM模拟一个城市交叉口的场景
02
支持路网自建和导入,支持V2X仿真
路网、控制和车辆是 VISSIM 软件里涉及到的 3 大核心组成部分。 对于路网,VISSIM 支持手动创建路网,支持从 PTV 系列软件中的宏观软件 PTV VISUM 和交通工程软件 PTV VISTRO 中导入路网,也支持通过 Opendrive 格式导入已有的路网。
尤其是支持 Opendrive 格式的路网的导入,对于车企用户是非常有用和高效的。例如通过 Prescan、Carmaker 搭建的路网,可以读入 VISSIM 中,不需要重复创建一遍路网。
VISSIM 特有的路段和路段连接器的路网结构形式,可以非常详尽地模拟复杂交叉口的车流转向。 VISSIM 不仅擅长模拟车辆的交通流,也非常擅长模拟路口的控制方式,包括限速标志、让行标志、停止标志、减速带、交叉口信号控制方案、可变信息板等。
对于车路协同的仿真,对于模拟V2X,VISSIM有很多应用案例,下图是德国卡尔斯鲁厄理工大学(KIT)进行Pre-Drive C2X项目的车车通讯的仿真结果截图。
德国卡尔斯鲁厄理工大学(KIT)的Pre-Drive C2X项目的结果截图
03
软件的功能性多样,开放程度好
VISSIM 的开放程度非常好,所以软件可用在多样的场景里,比如机场、停车场、交通枢纽、货运仓库、MAAS 的上下客车站等等。目前VISSIM 可以对接众多流行仿真软件(如下图所示)。
VISSIM可以对接的仿真软件举例
VISSIM 可以仿真城市道路上的交通,也可以仿真停车场的静态交通运行,以及枢纽上人车之间的互动关系,因此,可以为自动驾驶仿真测试提供更加丰富全面的场景选择,不是只局限于道路驾驶的场景。 通过 COM 接口,可以结合检测器,设置一些变化的管理规则、变化的路径指令,可以模拟基于条件改变路径或者速度等的交通场景。
VISSIM多场景里的应用举例
04
提供大量随机的选择可能性,充分反映交通运行的真实性
交通运行本身包含了很多的随机性,今天这条道路上同一时段运行的车辆分布和明天这条道路上同一时段运行的车辆分布不完全相同。为此,VISSIM 软件本身提供了大量的随机因素可以反映到软件的仿真运行里:
比如车辆输入的泊松分布(就是在一定的时间内,车辆进入路网有着随机性,不是统一一起进入的);
车辆类型在比例范围内的随机出现;
速度和加速度选择是从一个区间内随机选择;
停留时间是从一个区间内随机选择等等。
近年来,针对自动驾驶客户的研究需要,VISSIM 软件还为车企特别开发了在路网里随机生成一些驾驶错误的现象,错误出现的比例由用户设定,至于错误行为出现在哪条路段的哪个地方,VISSIM 可以随机生成,比如一些驾驶员误判交通标志和信号控制方案的现象、驾驶员超速的现象、行驶时偏离中心线的现象、注意力不集中的现象。 以上提到的这些随机的选择可能性,可以提供给用户丰富的手段,来搭建各种甚至是极端的需要测试的交通流测试环境,而这些极端的场景恰恰在真实的世界里是不能随意测试的。
VISSIM里可以模拟驾驶失误的几种场景
05
支持机动车和非机动车混行模拟的交通流仿真软件
车辆在道路上的驾驶行为一般分为三种:跟车行为,变道行为,横向超车行为。
在真实世界里,车辆在行驶过程中,前、后车有跟车行为,在行驶中前、后两辆车之间的距离是在动态调整的,由后一辆车的司机随时修正的。德国 Wiedemann 教授提出 Car following 跟驰模型,把跟车行为又细分为自由、逼近、跟随、刹车四种状态。
横向超车行为是指在中国很多城市,普遍存在小汽车和自行车、助动车在同一车道超车的现象,需要在交通仿真工具里体现出来。与其他的交通流仿真软件相比,VISSIM 是目前唯一可以实现这个功能的软件。
对于三种驾驶行为,VISSIM 提供了对应的 Car following 跟车模型、变道模型和横向超车行为模型,在软件里可以模拟驾驶行为。通过对应的驾驶行为编辑窗口,用户可以修改参数来输入符合当地交通驾驶状况的距离等参数。
VISSIM里的驾驶行为模型介绍图
06
支持自动驾驶列队跟驰(Platooning)
高速公路上的自动驾驶车队,将是落地较快的一种自动驾驶应用场景。为此,VISSIM 在软件里新添了“车队”这个编辑对象,用户可以设置车队允许自动编队的条件阈值,以及车队允许自动解散的条件阈值,从而模拟加入车队、编队行驶、离开车队三种运行状态。
对于车辆加入编队,VISSIM 软件仅允许有着相同驾驶行为的车辆加入车队;
对于编队行驶,在仿真时候,VISSIM 定义在车队内部,所有的车辆不能换道,同时每辆车保持相同的车距,仅提供有限的加速度变化;
如果遇到红绿灯,车队来不及完全通过的状况下,车队会自行拆散;
一旦车队里的车辆准备离开车队的时候(比如在高速公路里需要进入匝道,离开高速公路的时候),在 VISSIM 的交通仿真里,该车辆会提前增加与前车和与后车的跟车距离后,自行离开车队。
07
除了VISSIM ,PTV还有更全面的产品线支持
PTV集团一直专注于做交通软件和物流软件,产品组合涵盖了广泛的软件解决方案,如:Visum多模式出行规划和宏观交通模拟软件;Vistro进行交通影响分析,优化信号灯时间;Optima实时管理整体交通路网;Viswalk模拟和仿真行人行为;MaaS Modeller计算用户“出行服务”商业案例的运行效果。 随着自动驾驶技术的发展,PTV软件组合也不断拓展,以应用于自动驾驶的诸多场景。
08
PTV产品和IT巨头的仿真平台是合作关系
目前有很多IT企业进入仿真领域,通常利用算法来虚拟交通流数据。这种虚拟交通数据是用特定的、定义明确的障碍物和交通信号人工创建的,与真实的交通状况相比,这些数据的真实性和复杂性不高。PTV具有大量来自于真实交通流的数据、模型及算法,可以弥补他们的不足。实际上,PTV产品已经被多家IT巨头的仿真平台采用。
对于自动驾驶来说,解决自动驾驶车辆和其他道路使用者之间的交互仍然是一个挑战。现有的仿真器较少考虑双方的相互作用。举例来说,在Apollo仿真平台中实现了两种类型的非车辆交通参与者:行人和骑行者。然而,这些非车辆代理的行为是预先定义的,因此它们不能实时地对车辆做出反应。虽然在CARLA 中引入了动态行人,但是车辆与行人之间的交互是以一种简单的预先指定的方式进行处理:行人在移动之前会查看附近是否有车辆,然后在没有进一步检查的情况下继续移动,这种交互模式还过于简单,需要再深入研究。
为了逼近真实交通场景,自动驾驶仿真需要给大量参与车辆和其他道路使用者提供交互能力时,算力成为瓶颈,尤其是在进行大规模仿真时。要解决这些挑战,PTV将与产业链各环节合作伙伴一起,共同推动自动驾驶仿真技术的发展,加快自动驾驶的落地进程。
参考文献:
1. 51VR等:《中国自动驾驶仿真技术研究报告(2019)》;
2. 中国电动汽车百人会等:《中国自动驾驶仿真蓝皮书(2020)》;
3. 智能交通前沿科技:《交通流仿真综述》《微观交通仿真软件分析比较》
4. 汽车之家:肖莹《目前仿真测试在自动驾驶领域的发展如何》
5. 焉知自动驾驶:居菲《欧洲自动驾驶仿真项目CoExist介绍》
6. 焉知自动驾驶:沈畅《VISSIM 交通流仿真软件,自动驾驶技术的训练场》
编辑:jq
-
IT
+关注
关注
2文章
861浏览量
63495 -
PTV
+关注
关注
0文章
2浏览量
6694 -
自动驾驶
+关注
关注
784文章
13779浏览量
166350
原文标题:面对进入自动驾驶仿真的IT巨头,PTV VISSIM的优势何在?
文章出处:【微信号:zuosiqiche,微信公众号:佐思汽车研究】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
一文聊聊自动驾驶测试技术的挑战与创新



自动驾驶技术的典型应用 自动驾驶技术涉及到哪些技术



自动驾驶无图方案真的可行吗?
FPGA在自动驾驶领域有哪些优势?
FPGA在自动驾驶领域有哪些应用?
自动驾驶仿真测试实践:高精地图仿真


未来已来,多传感器融合感知是自动驾驶破局的关键
大众汽车和Mobileye加强自动驾驶合作
Waymo自愿召回444辆自动驾驶汽车 L4的自动驾驶还有很多路要走






 工商网监
工商网监
评论