 基于神经网络模型参考自适应实现混合动力汽车电子差速控制系统的设计
基于神经网络模型参考自适应实现混合动力汽车电子差速控制系统的设计

作者: 张琨;王京;蔡文远;马岛
1 引言
面临能源紧缺和环境污染的压力,世界各围十分重视电动汽车的研究和开发。综合了纯电动汽车和内燃机汽车优点的混合动力汽车自然得到了广泛的发展,成为清洁汽车阵营中不可忽视的力量。传统汽车是依靠行星轮的自转实现左、右车轮差速,在汽车转弯行驶或其他行驶情况下,都n,以借行星齿轮以相应转速自转,使两侧驱动车以不I叫转速在地面j:滚动而无滑动。对于采用混合驱动技术的电动车来说,电机驱动轮之间同样存在转速协调控制的问题。电动轮电子差速技术已经成为混合动力整车控制系统必须解决的问题。
本文所设计的混合动力汽车采用轮毂驱动技术,根据轮毂驱动电动汽车的技术特点,提出一种基于神经网络模型参考自适应的控制方法.实现混合动力驱动汽车的电子差速控制。
2 现有的电子差速技术
当汽车低速运行时,由ACKERMANN和JEANTAND提出的模型广泛应用于汽车的电子差速控制。如图1所示。
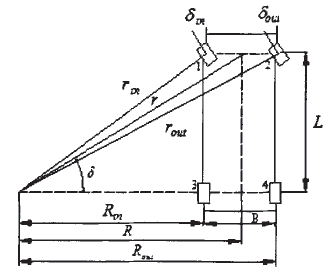
图1 ACKERMANN和JEANTAND模型
假设Uin,Uout分别为前内轮转速和前外轮转速,U3,U4分别为后内轮转速和后外轮转速,U为当前车速。
由上述模型可得

由此可见两后轮转速U3、U4是关于当前车速U和车轮转角δ的函数。因此可由加速踏板指令获得u,转角传感器获得δ,经计箅得到Ut和U4,然而上述模型只适用可静态分析,是在假设车轮为纯滚动的条件下建立的,没有考虑车辆转弯时的离心力和向心力。忽略了轮胎的影响。下面采用神经网络模型参考自适应的方法对差速模犁进行动态分析。
3 神经网络模型参考自适应电子差速控制
3.1模型参考自适应控制系统结构
模犁参考自适应控制(MRAC)特点足用一个给定的参考模型(一般为性能良好的低阶系统)来产生所要求的闭环系统输出Ym,控制的目的是使系统的实际输出跟踪Ym。MRAC适用于线性系统,当被控对象具有未知的非线性特性时,可采用神经网络模型参考自适应控制方案.其结构如图2所示。其中神经网络NNI为在线辨识器,用于辨识被控对象的模型;神经网络NNC为控制器,通过训练可使闭环系统的输出Y跟踪参考模型的输出Ym,从而使e=Ym-Y→0。
神经网络模刑参考自适应控制的结构有两种:直接型和间接型。间接方式比直接方式多采用一个神经网络辨识器NNI。其余部分完全相同。其中,神经控制器NNC的作用足通过训练,使受控对象输出与参考模型之差尽量小。
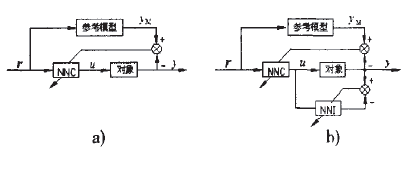
图2神经网络模型参考A适应控制结构 a)直接型 b)问接型
3.2模型参考自适应电子差速模刭的建立
本文采用直接型模型参考自适应控制方法,选择非线性的神经网络控制器。针对前轮转向后轮驱动的混合动力系统,利用Ackermann模型计算基本轮速,根据车辆横向动力学方程建立的整车动力学模型作为参考模捌。指令输入施加到神经网络控制器中,控制器的输出作为对象的输入,使对象的输出与参考模型的输出按最小二乘匹配。,由整车动力学模型得到的轮速与Ackermann模型计箅的基本轮速之筹作为误差信号,反馈给神经网络。经神经网络的不断训练,修改权值,使误差达到预期目标。控制原理图如图3所示。
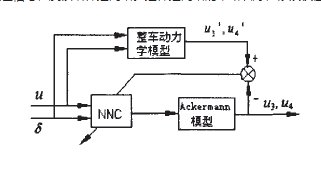
图3神经网络模型参考自适应电子差速控制
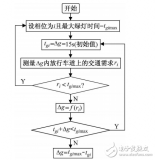
对于神经网络的学习,本文采用离线学习的方法。离线学习就是将网络的学习过程与控制过程分开,将系统动态过程中的一螳输入/输出对构成网络的学习样本空间,以此对网络进行离线训练。整个网络在训练结束后再将其加进控制系统中去。多层感知器型神经网络最常用的训练算法为BP算法。其训练步骤如下:
①随机产生网络参数初始状态r,令t=t0
②根据BP算法产生r的下一候选状态r‘
③令r为训练样本的误差平方和函数
④若e《= 0,则令r=r’;否则以概率exp(-e/kgt)接受r=r‘
⑤重复②~④n次
⑥修正权值
⑦重复②一⑥直到误差已达到精度要求
4 电子差速控制系统仿真及结果分析
4.1仿真数据的选取和处理
本文是在Matlab/Simulink的仿真环境下进行建模与仿真。仿真研究中车辆模型各相关参数取值为:m=1200kg,a=1.32m,b=1.22m,L=2.54m,B=1.41m,h=0.6m,J2=450kg*m2,前轮侧偏刚度和Cf=21000N/rad,后轮侧偏刚度和Cr=24000N/rad。神经网络控制器的数据均进行归一化处理。
4.2仿真结果及分析
图4足控制模型训练过程中误差函数的变化曲线。图巾横坐标为训练次数,纵坐标为误差变化率。可见,当训练300次之后,模犁的训练性能误差可达1.41971。系统已经达到了要求的误差范同之内。
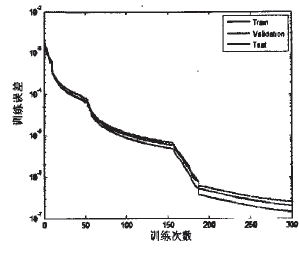
图4电子差速模型的性能曲线
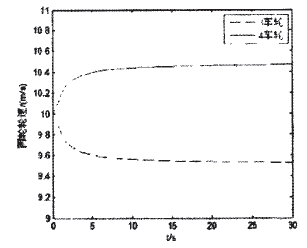
图5两后轮轮心速度
本文对差速模犁进行了动态仿真,汽车原始速度为10m/s匀速运行,第0秒时,转向角δ变为100,图5为仿真结果。图中横牮标为时间,纵坐标为车轮轮速。由仿真结果可以看出,当产生转向角之后,内侧后轮速度减小,外侧后轮速度增大,两后轮之间有一定的速度差。差速的产生使得汽车能够乎稳转向。
图6为u=10m/s和u=20m/s时,δ由0变为30°的仿真结果。仿真时长为30s。
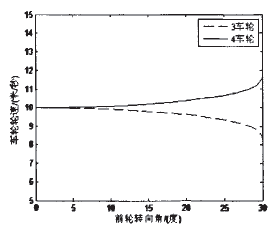
U=10m/s
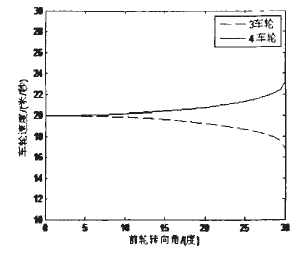
U=20m/s
图6不同车速时轮速随转向角的变化
根据上述仿真结果可以看出,对于一个车体,转弯时,内侧车轮速度减小,外侧车轮速度增大,转向角度越大,两驱动轮之间差速越大;当前车速越大,两驱动轮问差速越大。基于神经网络模型参考自适应建立的电子差速控制模型误差小,能够达到很好的差速效果。
5 结论
本文针对混合动力汽车的特性,应用神经网络模型参考自适应的控制方法建立两电机驱动后轮的差速模璎,在Matlab/Simulink环境下进行仿真,准确地反应了控制系统的非线性特性,减低了系统的误差。达到了很好的控制效果。
本文作者创新点:结合Aackermann模型,运用神经网络模型参考自适应的方法建立混合动力汽车的差速模型。通过仿真分析看出,该方法误差小,鲁棒性好。
责任编辑:gt
-
电动车
+关注
关注
74文章
3137浏览量
118745 -
神经网络
+关注
关注
42文章
4844浏览量
108197 -
动力汽车
+关注
关注
0文章
79浏览量
14392
发布评论请先 登录
如何利用SoPC实现神经网络速度控制器?
基于自适应神经网络模糊推理的负荷预测
自适应模糊神经网络的交通灯控制系统的设计



评论