 基于LabVIEW和网络技术实现车辆检测系统的应用方案
基于LabVIEW和网络技术实现车辆检测系统的应用方案
作者:邵永华,鲍一丹,王立大
虚拟仪器技术在检测与控制方面的应用越来越广, 而基于网络的虚拟仪器技术是指将工作于检测现场的虚拟仪器通过网络扩展到远程应用领域。为远程客户提供现场的检测数据和图像, 增强临场感; 还可以对远程的检测进行实时的控制, 大大拓展了对象测试和控制的应用范围, 正成为未来发展的趋势。在车辆的性能检测中, 发生故障或定期性能检测的车辆有时处于比较偏远的山区或旷野地区, 或者车辆(如拖拉机) 检测的环境比较恶劣。这给检测和实时获取检测结果带来了麻烦。这时就可以借助于远程虚拟仪器技术对检测进行实时监视、网上数据传输以及系统的远程控制等。本文分别采用NI 公司的LabVIEW/GWeb Server 技术和DataSocket 技术实现检测对象的远程状态监视, 并利用LabV IEW 及网络技术相结合开发车辆远程控制系统。
NI (N at ion In st rum en t) 公司在虚拟仪器技术方面取得了丰硕成果, 其LabVIEW 和Labw indows/cvi 软件以及各种规格的DAQ数据采集卡正被广泛地使用L 随着In ternet 技术的发展, N I 公司分别以DataSocket 技术、RDA 技术、O PC 技术为基础开发了能够实现远程监控的多种软件平台和工具包如Internet Development Tool kit (简称IDT ) LIDT 是N I的面向G 语言应用环境的网络应用开发工具包, 它提供了G 环境下的虚拟仪器与Internet连接的手段。从而实现在Internet 上传输数据或将虚拟仪器的前面板发布到Internet 上。
基于网络的车辆检测系统
用LabV IEW 平台所建立的远程车辆检测系统中, 虚拟仪器技术和网络通讯技术是构建远程系统的技术基础, 其远程测试系统如图1所示。

测试系统由测试对象、各类传感器、信号调理器(主要对信号进行放大、滤波以及信号的隔离、电流激励、线性化等)、计算机等组成。计算机配有PC I-6024E 的DAQ 数据采集卡(8 通道模拟输入, 200 K 采样速率, 12 b it 输入输出精度, - 10~10V 输入范围, 1、10、100 的输入增益, 2 通道模拟输出) 和L abV IEW 6i 版本的软件。该系统通过制动力、轴重、噪声、转速、烟度等传感器获取信号, 信号经过放大和低通滤波后, 经过8 路A/D 转换后, 用L abV IEW程序实现信号的管理、分析处理、显示、保存、报警、报表打印和网络传输等功能, 从而来检测车辆的制动性能、轴重、噪声、车速、烟度等。其中系统的转速测试界面如图2 所示。
整个车辆综合检测系统还自带一个工具箱, 里面有频谱分析仪, 实现某些信号的分析和故障的自诊断; 远程控制工具, 实现系统的远程控制; 数据库功能, 实现检测数据的存储和查询等功能。如在该系统中可测出正常的噪声频谱和检测时的噪声频谱, 从噪声频谱的异常改变诊断故障的原因。
车辆远程检测的多种实现方法
车辆性能综合检测系统在远程检测方面的实现方法主要是把现场的检测数据、波形的显示图像, 通过网络传输到服务器上。用户通过网页浏览的方式获取现场的检测场景, 或者登陆服务器获取数据, 根据获得的数据分析出检测结果以及判断可能出现的故障原因, 再通过网络反馈给现场检测人员。在网络传输中, 可以通 过DataSocket 技术在In ternet 上进行现场检测数据的传输, 也可以通过GWeb Server 将车辆现场虚拟仪器显示的前面板在网上发布。
GWeb Server 的实现
GWeb Server 支持标准的HTTP、CG I、SM TP、FTP, 实现对V I 的远程交互式访问、消息和邮件的发送以及文件的自动上下载。LabVIEW6i 的w eb server 参数设置好后,web publishing too l 自动生成H tm l 文档和在网页中发布V I 的前面板。G W eb Server 结合L abV IEW 环境下IDT 工具包的CG I V IS 和CG IA nimations 编程工具, 可在浏览器中实现启动、停止、参数传递、密码保护等用户交互功能。使用浏览器访问文档时启动该测控系统以实施远程监控, 使不同地域的技术人员共同监视试验过程。 图3 为系统工作时车辆轴重检测的w eb 发布界面L但是基于GWeb Server的V I 检测显示面板是通过传输图像来实现的, 这必将消耗大量的网络资源, 这在局域网内实用效果较好。而在广域网, 由于受网络带宽的限制, 实时性较差。为此, 我们结合了N I 提供DataSocket 技术来实现网络的数据传输, 解决了网络的带宽问题。并且不需要大量的网络编程技术。
Da taSocket 服务器
DataSocket 是Nat ional Instrumen t 提供的一种基于TCP/IP 协议的编程工具, 借助它可以在不同的应用程序和数据源之间共享数据LDataSocket 可以访问本地文件以及HTTP和FTP 服务器上的数据,DataSocket 为低层通讯协议提供了一致的A P I, 编程人员无需为不同的数据格式和通讯协议编写具体的程序代码。而且, 这些数据源通常分布在不同的计算机上。DataSocket 用类似于Web 中的统一资源定位器(URL ) 定位数据源,U RL 不同的前缀表示了不同的数据类型, F ILE 表示本地文件,HTTP 为超文本传输资源, FTP 为文件传输协议,OPC 表示访问的资源是O PC 服务器, 在该系统中我们利用DSTP (DataSocket transfer protocol) 协议在应用程序间交换数据LDataSocket 不需了解底层操作过程等优点, 特别适合于远程数据采集监控和数据共享等应用程序的开发。在L abV IEW 中提供了Datasockserver m anage 和Datasocket server. 在数据传输时, 首先对Datasock server manage 进行配置。然后在客户端输入服务器端的地址, 并运行相应的程序。
车辆检测系统远程控制的实现
远程控制的现实意义
In ternet 的出现和网络技术的进步给测控系统的发展注入了新的活力, 该检测系统很好地实现了车辆检测数据和图像的网络传输。但随着社会的发展, 检测对象和检测环境也越来越复杂。在很多的检测场合, 测控环境条件恶劣: 如有些高温、低温、多辐射、多噪声以及空气严重污染等, 对检测者的身体健康造成严重的影响。有些检测环境条件甚至不宜人去直接操作或需要在别的地方随时获取现场情报和实施控制的, 因此, 实现远程控制就显得必不可少。在车辆综合性能的检测中, 由于检测现场噪声较大, 空气较差, 以及露天天气的影响, 实现远程控制可带来检测上更多方便。
远程控制的实现
在远程控制中, LabVNC 是基于VNC 协议(Virtual network protocol) 的程序, 运用LabVNC 将对于在服务器端运行的任何LabVIEW 的程序产生一个Java applet, 客户端用IE 浏览器访问服务器端地址时, J ava app let 可以在客户端自动下载并运行。因此, 客户端可以根据服务器端提供的权限监视或控制服务器端的程序。在LabV IEW 实现的远程控制中提供了当前服务器配置, 即LabVNC 当前使用者属性。如图4 所示:
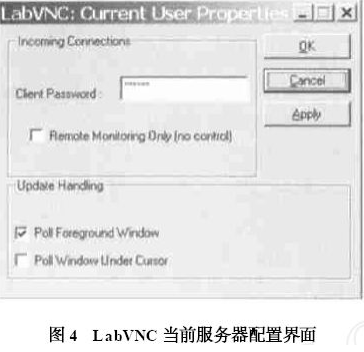
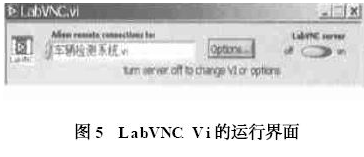
在图4 中必须设置客户的密码, 即客户端在实现远程控制时必须输入验证密码, 然后根据LabVNC 服务器提供的权限来获取相应的权限, 包括远程控制或者远程监视。LabVNC还提供了更新处理模式, 包括鼠标驱动和前面窗滚动更新。实行远程控制时, 首先在服务器端运行车辆检测程序, 同时调用远程控制程序, 跳出LabVNC. vi (如图5) 对LabVNC 服务器配置, 进行Password 和其它属性的设置。然后把LabVNC server 按钮打到On即运行。当客户端实施控制时, 在服务器端的程序失去控制权限。但在实现远程控制时, 同时只允许一个客户控制, 其它客户只能等待, 并且只有当当前客户退出后才可以实现远程控制。用该方法实现的远程控制在局域网内效果较佳, 但在一般网络上存在较明显的滞后现象。
结束语
提出了一种基于网络化虚拟仪器技术的车辆远程检测系统。利用NI 公司提供的G webserver 和DataSocket 技术方便地实现图像和数据的远程传输, 并将LabVIEW 和网络技术相结合, 方便地实现了车辆的远程实时控制。并在车辆的综合性能的远程检测中得到了较好的应用效果。
责任编辑:gt
-
LabVIEW
+关注
关注
1980文章
3664浏览量
327623 -
检测系统
+关注
关注
3文章
964浏览量
43310 -
虚拟仪器
+关注
关注
23文章
775浏览量
87529
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论