 基于Motorola HSC12系列16位MCU实现汽车ABS/ASR集成系统的设计
基于Motorola HSC12系列16位MCU实现汽车ABS/ASR集成系统的设计
作者:崔海峰 , 齐志权 , 王仁广
汽车驱动防滑系统(Anti-slip Regulation System,简称ASR)是在汽车制动防抱死系统(Antilock Braking System,简称ABS)的基础上发展起来的。在装备了ABS的汽车上添加发动机输出力矩的调节功能和驱动轮制动压力的调节功能后,ABS所用的车轮转速传感器和压力调节器可全部为ASR所利用。ASR和ABS在算法上很相似,许多程序模块可以通用,因而在实际应用中可以把两者集成在一个控制器中,组成ABS/ASR集成系统。
1 轿车ABS/ASR集成控制系统简介
通过对捷达GTX试验样车的液压制动系统进行改造,实现了可以独立调节四个轮缸压力的ABS/ASR集成系统液压执行机构。在此基础上,开发了一种轿车ABS/ASR集成控制系统,主要包括控制系统ECU、传感器、执行机构三个部分。图1为轿车ABS/ASR集成控制系统示意图。
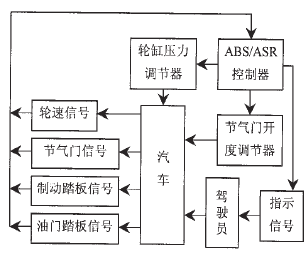
图1 ABS/ASR集成控制系统框图
当汽车正常行驶时,ABS/ASR集成控制系统的ECU实时采集和处理传感器信号,并根据其所提供的信息,选用不同的控制方式对汽车进行控制。控制的方式包括调节车轮轮缸压力的制动力矩控制模式和调节发动机输出力矩的节气门开度控制模式。ABS和ASR子系统功能的实现就是对以上两种控制方式适当组合和合理控制的结果。
2 ABS/ASR集成控制系统的ECU
2.1 MCU的选取
MCU是ABS/ASR集成控制系统的核心,它负责数据的采集和处理、所有的逻辑运算以及最终控制的实现。考虑到集成控制系统对其运算能力、存储空间、I/O接口的要求以及后续集成其它系统的目的,选择了功能强大的Motorola新一代HSC12系列16位MCU——MC9S12DP256。
它具有很强的运算能力、丰富的I/O接口和充裕的存储空间。采用STAR12 CPU,核心运算能力可以达到50MHz,总线速度可以达到25MHz,采用优化的指令集,指令的运算速度得到了很大的提高。通过片内的PLL功能可以方便地选择MCU的核心频率而不管外部晶振频率为多少。片内集成了256K FLASH、12K RAM和4K EEPROM,完全可以满足程序对存储空间的要求。它有丰富的I/O接口,包括两个异步串行通讯接口(SCI),三个同步串行通讯接口(SPI),八通道输入捕捉/输出比较(IC/OC),十六个10位A/D接口,八路8位PWM,二十九路独立的数字I/O接口,二十路带中断和唤醒功能的数字I/O接口,五路CAN总线接口,一个IIC总线接口,一个BDLC(J1850)接口。
该MCU有四路输入捕捉(带有保持缓冲器),利用独立的ECT捕捉时钟可以自行完成两个脉冲间的周期计算,非常适合进行四个车轮的轮速采集,大大提高了MCU的工作效率。
2.2 ECU硬件电路设计
MCU的外围电路采用模块化设计思想,即把电控单元划分成不同的模块,将比较成熟固定的模块组成一块单独的电路板,研究过程中变化较大的模块组成另一块单独的电路板,板与板之间通过I/O扩展插槽进行通信。这种设计方法有利于试验过程中对系统的维护和扩展,例如需要更改电路或者对系统进行扩展时,无需重新设计整块电路,只需在相应模块上改变或添加即可;模块化设计也具有更好的电气特性,例如,驱动模块是比较大的干扰源,对A/D转换和MCU的工作影响很大,可放在不同的电路板上,对信号线采取隔离措施即可。
根据ABS/ASR集成控制系统的特点,将整个电控单元分为了A板和B板,两块电路板之间通过I/O总线扩展插槽连接。
A板主要包括主控芯片MC9S12DP256及其最小系统外围电路、通讯接口电路和数据采集电路,如图2所示。
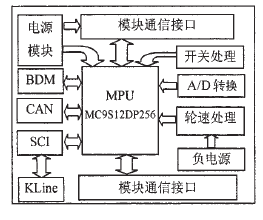
图2 A板电路结构示意图
MC9S12DP256最小系统外围电路包括电源模块、外围复位电路、时钟晶振电路、工作模式选择等。
通讯接口电路包括BDM接口。两路SCI串口通讯接口电路,其中一路通过硬件跳线选择连接故障诊断驱动芯片MC33199,利用PCA82C250驱动芯片引出两路CAN通讯节点,预留给集成控制系统扩展使用。
A板还包括ECU中的数字量、模拟量和开关量采集处理电路,主要包括四个轮速信号、节气门开度信号、加速踏板开度信号、高压蓄能器压力传感器信号、制动踏板开关信号等。
B板主要包括执行机构驱动电路和开关量信号处理电路,如图3所示。
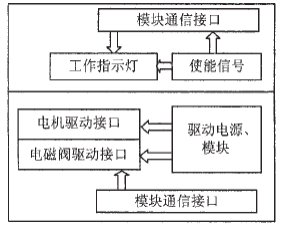
图3 B板电路结构示意图
系统驱动的执行机构主要包括ABS压力调节器的四个常开进油阀、四个常闭出油电磁阀、四个ASR电磁阀和一个ABS电机。
ABS和ASR子系统的使能信号及工作指示灯部分的相关电路也放在该电路板上。
2.3 ECU控制软件设计
ABS/ASR集成控制系统中ABS和ASR子系统本身都是复杂的控制系统。软件系统的集成并不是把ABS和ASR控制系统简单地叠加,而是要把它们有机地融合,同时还要考虑到软件运行的实时性、可靠性等问题。
集成控制系统的控制软件主要由系统初始化模块、启动自检模块、主控制模块、制动踏板中断服务程序模块等几大部分组成,总体框图如图4所示。

图4 ABS/ASR集成控制系统软件框图
系统初始化模块在系统上电复位时对系统进行初始化。初始化内容包括MCU内部的时钟、各端口设置、串行通讯接口、模拟和数字通道、看门狗定时器、系统变量等,以保证MCU正常运行。另外还包括对集成系统的执行机构进行复位,确保车辆的安全行驶。
启动自检模块是在系统初始化后对关键软、硬件部分进行静态检测,以判断系统的软、硬件工作是否正常。如果发现集成控制系统中存在故障,故障警示灯会持续点亮。
主控制模块为ABS/ASR集成控制系统的控制主程序,见图4中阴影虚线框。主控制模块通过实时中断RTI做固定周期20ms的循环,连续调用故障诊断模块、数据处理模块、参考车速计算模块、路面识别模块和车辆运动状态识别模块,实时进行车辆运动状态和外界环境的判断。然后依据车辆当前的运行状态,由控制执行模块分别进行ABS或ASR的逻辑门限值控制。
考虑到驾驶员制动动作与ASR制动干预控制的紧急切换需要,设计了制动踏板中断服务程序。当采集到制动踏板触发的中断时,进入制动踏板中断服务程序,如果集成控制系统处于ASR工作方式,立即退出当前控制,对执行机构模块进行复位,恢复常规制动方式,不干预驾驶员的制动动作,保证了车辆行驶的安全性。
3 试验结果与分析
利用所开发的采集系统和本文所设计的ABS/ASR集成控制系统,在捷达GTX试验车上进行了典型工况ABS和ASR试验,验证其控制效果。
ABS试验选择在干柏油路面、制动初速度为50km/h的条件下进行,图5为带有ABS控制的直线制动过程。图中显示了车辆左前轮速度变化的过程,在整个制动过程中与车速都能够比较好地逼近,车轮的滑移率也被控制在比较理想的区域内,保证了车辆制动过程中方向的稳定性。
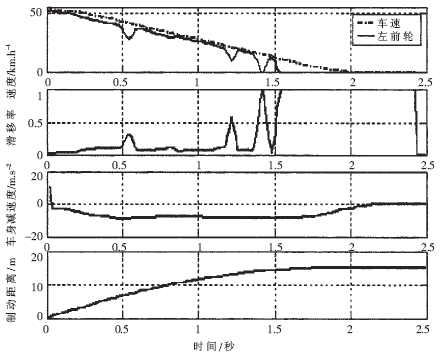
图5 带有ABS控制,干路面,初速50km/h条件下的直线制动
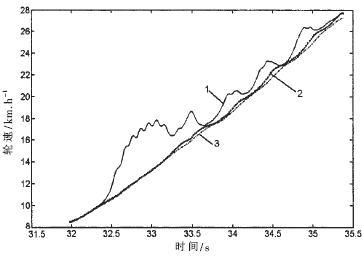
图6 ASR对开路面上左右两侧驱动轮轮速比较
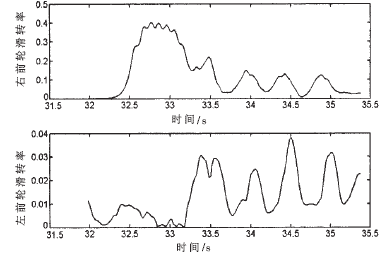
图7 ASR对开路面上左右两侧驱动轮滑转率比较
ASR试验选择一挡对开路面起步过程,右侧车轮位于低附着系数路面上。图6为起步过程中左右两侧驱动轮转速对比,其中曲线1为右侧驱动轮车速,曲线3为左侧驱动轮车速,曲线2为非驱动轮车速,可近似认为是车身速度。可以看到起步初期,右侧驱动轮发生明显的滑转,在33.5秒附近ASR开始调节,车轮的滑转明显改善。图7为起步过程中左右两侧驱动轮滑转率的变化曲线,更明显地反映出进行ASR控制后,右侧滑转驱动轮的滑转率被控制在较为理想的范围内。同时,由于制动干预的影响,左侧驱动轮的滑转率略有上升。
通过实车试验,说明ABS/ASR集成控制系统中的ABS和ASR功能都取得了比较理想的控制效果,为其它底盘主动安全控制系统的集成创造了条件。
责任编辑:gt
-
传感器
+关注
关注
2552文章
51383浏览量
756241 -
mcu
+关注
关注
146文章
17316浏览量
352465 -
控制器
+关注
关注
112文章
16444浏览量
179283
发布评论请先 登录
相关推荐
MC9S12DP256B汽车防抱死系统(ABS)的设计
翺捷/ASR产品资讯
ASR6505基于STM 8位MCU的无线通信芯片组
高档客车ABS及ASR制动系统
气压制动系统ABS/ASR装置的工作原理与检修
富士通半导体推出113款适于汽车应用的16位和32位MCU
基于ABS/ESP/ASR/ACC桥车主动安全集成系统的设计

基于MC9S12DP256 微处理器的轿车集成电控系统

未来中国16位汽车MCU市场将步入平稳成长期
ASR6505基于STM 8位MCU与SX1262 的SiP全频段LoRa芯片






 工商网监
工商网监
评论