 结合STM32F4关于CAN基本的信息描述
结合STM32F4关于CAN基本的信息描述
CAN,Controller Area Network(控制器局域网络),在汽车电子、工业控制领域的应用比较多,通常用于局域组网。
CAN总线和UART、I2C、SPI总线最大的区别主要在于取消了传统的地址编码方式,理论上讲总线上的互联节点数不受限制,拥有强大的握手与出错管理及重发机制,具有很强的抗干扰能力。
1
STM32 CAN 基础内容CAN网络中主要由CAN控制器和CAN收发器组成,大部分STM32内部都集成了CAN控制器,如果需要使用CAN功能,还需要在外部连接一个CAN收发器才能使用。
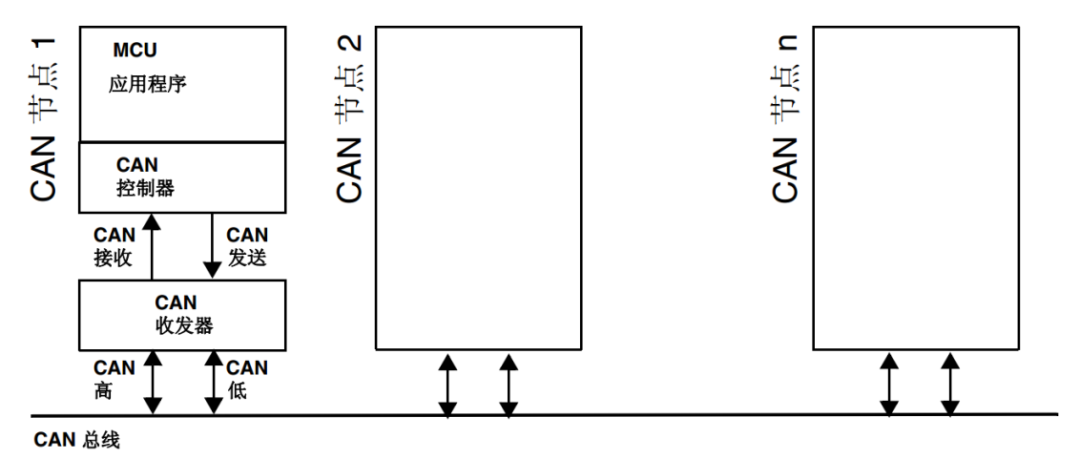
▲ CAN 网络拓扑结构图
STM32内部集成的CAN控制器,支持 2.0A 和 B 版本的 CAN 协议。还有通信速度更快的CAN FD、 CAN XL,目前一部分STM32支持CAN FD(比如STM32H7)。
下面结合STM32F4描述一下关于CAN基本的信息:
1. CAN总线
CAN总线上的数据是基于差分信号,通常只有两根线:CAN_L和CAN_H。从STM32芯片引出来的两个信号脚CAN发送和CAN接收,有点类似UART的收发引脚,但内部控制逻辑完全不一样。经过CAN收发器后形成两根信号线CAN_L和CAN_H挂到CAN总线上。
2. CAN波特率
CAN 总线属于异步通信,和UART类似,因此具有通信的波特率,标准 CAN 波特率通常支持高达 1 Mb/s。当然,也可以配置成500Kb/s、 250Kb/s等。
CAN 波特率由多个参数决定,下面章节会讲述波特率配置。
3. CAN发送
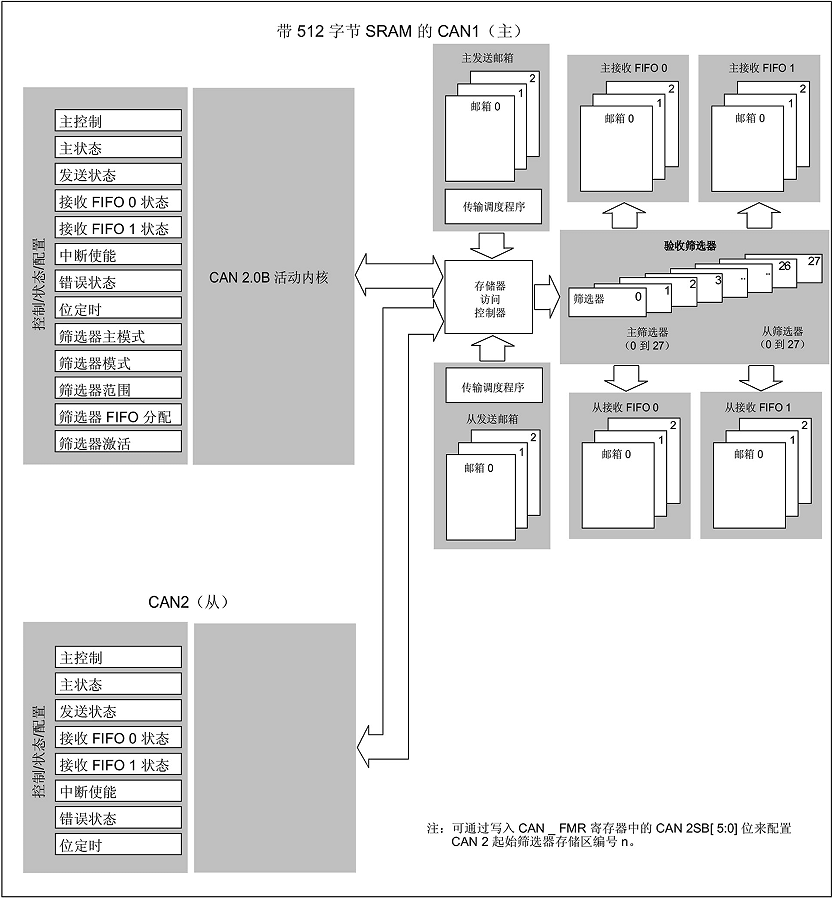
STM32集成的CAN控制器支持三个发送邮箱,也就是说可以支持队列发送消息(数据),如果同一时间发送数据比较多,使用邮箱就比较高效,不用消耗CPU资源,CAN控制器自动发送,直到完成。
4. CAN接收
和发送类似,CAN接收支持接收FIFO,可以连续接收多个消息(数据),CPU空闲了再去处理接收到的数据。
同时,CAN控制器还支持接收过滤配置,也就是说,有些数据我不需要,CAN控制器可以自动过滤掉。
通过一张CAN框图来认识CAN控制器:
关于CAN的更多信息,可以参看芯片对应的手册和CAN相关协议资料。
2
STM32 CAN 常规配置STM32 CAN控制器需要配置的参数比较多,对于初学者而言,重点就是波特率。如果你只使用一些基本的功能,不使用的功能建议参考官方代码默认配置即可。
1. CAN引脚时钟配置
引脚和时钟是使用外设基本的配置,比如F4例程:
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(CAN_GPIO_CLK, ENABLE);RCC_APB1PeriphClockCmd(CAN_CLK, ENABLE);
GPIO_PinAFConfig(CAN_GPIO_PORT, CAN_RX_SOURCE, CAN_AF_PORT);GPIO_PinAFConfig(CAN_GPIO_PORT, CAN_TX_SOURCE, CAN_AF_PORT);
GPIO_InitStructure.GPIO_Pin = CAN_RX_PIN | CAN_TX_PIN;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;GPIO_Init(CAN_GPIO_PORT, &GPIO_InitStructure);
2. CAN常规配置
这些基本参数,需要进一步功能的作用,默认DISABLE。
CAN_InitTypeDef CAN_InitStructure;
CAN_InitStructure.CAN_TTCM = DISABLE;CAN_InitStructure.CAN_ABOM = DISABLE;CAN_InitStructure.CAN_AWUM = DISABLE;CAN_InitStructure.CAN_NART = DISABLE;CAN_InitStructure.CAN_RFLM = DISABLE;CAN_InitStructure.CAN_TXFP = DISABLE;CAN_InitStructure.CAN_Mode = CAN_Mode_Normal;
3. CAN波特率配置
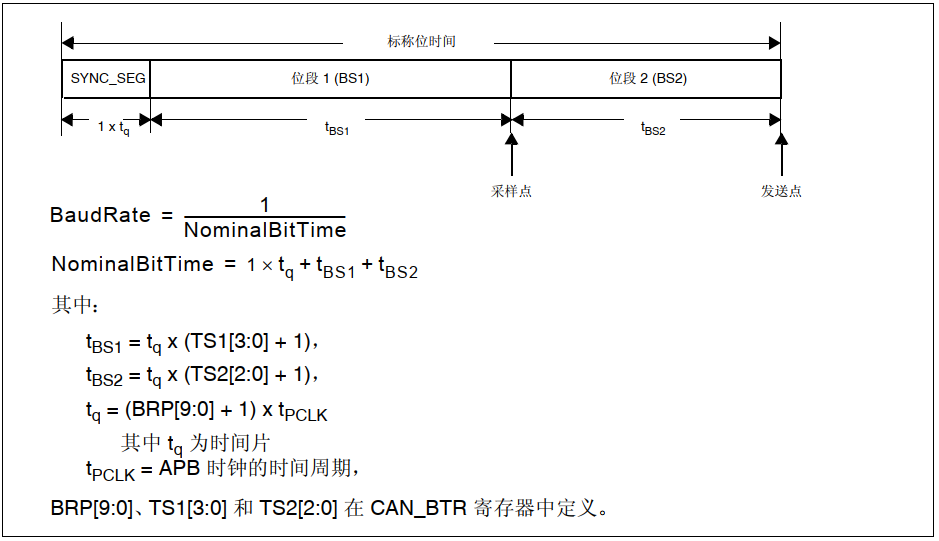
波特率是第一步需要掌握的,波特率不对,就不能正常通信。波特率 = 时钟 ÷ Prescaler ÷ (SJW + BS1 + BS2);
比如:42M / 2 / (1 + 12 +8) = 1M
CAN_InitStructure.CAN_SJW = CAN_SJW_1tq;CAN_InitStructure.CAN_BS1 = CAN_BS1_12tq;CAN_InitStructure.CAN_BS2 = CAN_BS2_8tq;CAN_InitStructure.CAN_Prescaler = 2;
4. CAN过滤配置CAN过滤是相对更高级的功能,建议深入了解,否则建议默认配置即可。
CAN_FilterInitTypeDef CAN_FilterInitStructure;CAN_FilterInitStructure.CAN_FilterNumber = 0;CAN_FilterInitStructure.CAN_FilterMode = CAN_FilterMode_IdMask;CAN_FilterInitStructure.CAN_FilterScale = CAN_FilterScale_32bit;CAN_FilterInitStructure.CAN_FilterIdHigh = 0x0000;CAN_FilterInitStructure.CAN_FilterIdLow = 0x0000;CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0x0000;CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0x0000;CAN_FilterInitStructure.CAN_FilterFIFOAssignment = 0;CAN_FilterInitStructure.CAN_FilterActivation = ENABLE;CAN_FilterInit(&CAN_FilterInitStructure);
以上是通过标准外设库配置的参数,使用STM32CubeMX就可以很轻松的一键配置了。
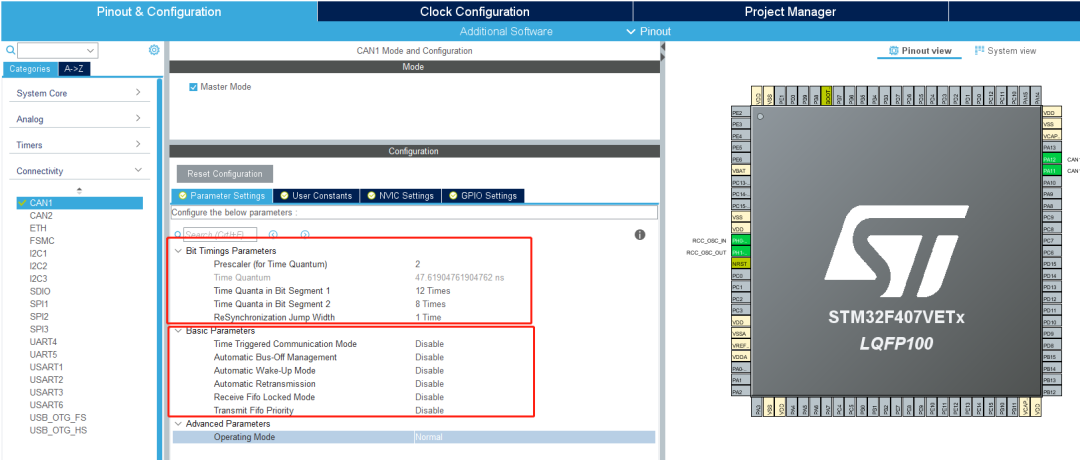
对CAN有一定基础了解,同时掌握HAL库使用方法的人,建议直接使用STM32CubemMX 配置并生成初始化代码。
3
STM32 CAN 常见问题STM32的CAN控制器功能相对比较强大,实际开发过程中容易遇到问题,软件硬件都有可能导致通信异常,下面整理几点常见问题。
问题一:CAN总线接线问题
CAN控制器出来的信号为CAN_TX和CAN_RX,有点类似UART,但它和外面的收发器接法是TX对应TX,不是UART交叉连接。
同时,CAN总线和485类似是差分信号,具有极性。通常CAN总线只有两根线CAN_L和CAN_H。
上面指出来的两点,任意一处接线错误都会导致通信失败。所以,建议参考官方给出的电路原理图。
问题二:通信波特率配置问题
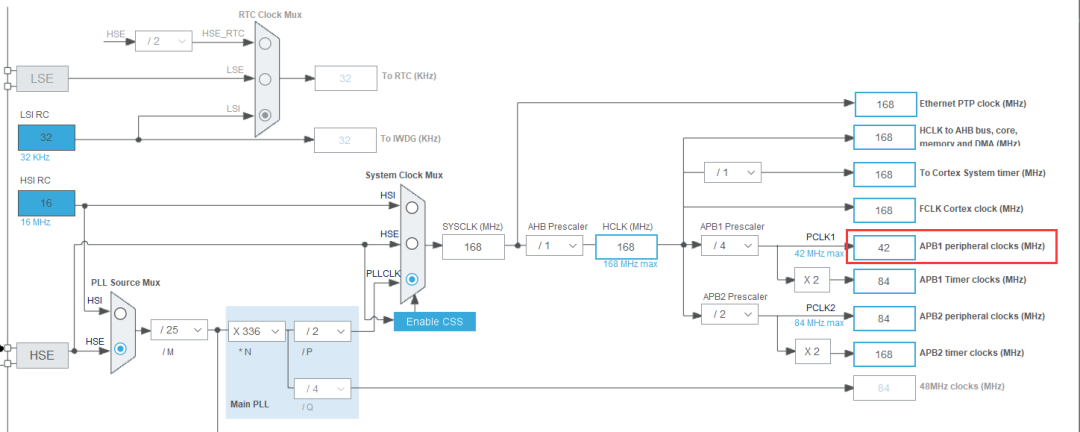
CAN属于异步通信,如果波特率不对,就会通信失败,或者接收到乱码。影响波特率的因素有很多:CAN时钟、分频值、位时序。
CAN时钟也就是RCC出来进入CAN控制器的APB时钟,比如上面代码中配置的是APB1,42M时钟。(一定要分清,不能认为是84M)。
位时序也是比较重要的一个配置,包含同步段、位段等,需要根据实际情况调整对应的值。
问题三:CAN接收数据丢包问题
通常来说,CAN组网之后,总线上的数据量比较大,如果你配置或者处理不正确,就会导致丢失数据的情况。
1. CAN接收数据,通常使用中断
CAN中断入口和CAN中断函数处理比较容易引起数据丢失的问题。
有些CAN中断入口和其它外设的共用,比如STM32F103的CAN和USB共用一个中断入口。
通信时,由于CAN中断频率较高,中断函数不能占用太多时间,通常来说,只对接收到的数据进行一些简单搬运处理,不建议在中断程序里处理较为复杂的逻辑或算法运算。
2. 双CAN过滤器管理问题
部分STM32芯片具有双CAN模块,从整体功能上讲,两个CAN是独立的。但是,两个CAN共用过滤器管理模块,对于STM32芯片来讲,该过滤器控制模块由CAN1统一管理,所以即使只是单独使用CAN2进行收发,也须开启CAN1,否则会因为过滤器未能开启,导致单独使用CAN2时无法收发的情形。
3.CAN接收过滤
CAN总线接收可以通过配置,对一些“无用”或不需要的信息进行过滤,换言之即对总线上的信息选择性地进行接收。这个功能也算是CAN总线的高级功能,只有深入理解该功能之后方能灵活使用之。否则会因为过滤配置不当导致收发异常。
复盘一下▼CAN 基础内容:CAN总线、波特率、发送和接收;▼CAN 常规配置:引脚时钟、常规配置、波特率配置、过滤配置;▼CAN 常见问题:接线问题、波特率配置问题、接收数据丢包问题;
原文标题:STM32学习笔记 | CAN总线收发数据常见问题分析
文章出处:【微信公众号:strongerHuang】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
CAN
+关注
关注
57文章
2754浏览量
463700 -
STM32
+关注
关注
2270文章
10900浏览量
355996
原文标题:STM32学习笔记 | CAN总线收发数据常见问题分析
文章出处:【微信号:strongerHuang,微信公众号:strongerHuang】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
STM32项目实战:基于STM32F4的智能灯光控制系统(LVGL),附项目教程/源码





 工商网监
工商网监
评论