 LIN总线技术规格及在汽车电子系统中的应用研究
LIN总线技术规格及在汽车电子系统中的应用研究
动力和车速已经不再是消费者对汽车性能的唯一追求,人们越来越关心驾车时的舒适感、安全保障、功能的易用性,和对环境的保护等方面。因此,除了车身系统(Car body)和传动系统(Power Train)等传统的汽车控制单元以外,安全系统(Safety)和车载资通娱乐系统(Telematics / Infotainment)也随着电子技术的进步而逐渐成熟。
现代的汽车电子系统中,电子控制组件(ECU)因在上述系统中赋予汽车更高效和更具智能性的操控能力而扮演了重要角色,也实现了诸如电源、车灯和门窗等自动检测功能,给驾驶提供了更大便利。
汽车中的电子系统和组件平均达到80多个,它们之间越来越复杂的连接和通信功能对总线技术提出了需求。车灯、发动机、电磁阀、空调等设备的传统连接方式为线缆连接,而如果电子元件之间也用电缆连接则必然造成连接复杂性的提高、可靠性的下降,和整体重量的上升;此外,伴随而来的线缆的磨损和老化现象也将使汽车的安全性能降低。
为避免线缆带来的各种麻烦,车载网络(In-Vehicle Network)中应用标准化总线技术则成为较理想的解决方式。按不同的技术特点和应用领域,车载总线技术可分为五类。如表一所示,第一类LIN、TTP/A等总线传输速度最低,适用于车体控制;第二类中速总线,如低速CAN、SAE J1850、VAN(Vehicle Area Network)等,适用于对实时性要求不高的通信应用;第三类包括高速CAN、TTP/C等技术,适用于高速、实时死循环控制的多路传输网络;第四类如IDB-C、IDB-M(D2B、MOST、IDB1394))、IDB-Wireless(Bluetooth)等,一般应用于车载资通娱乐网络;第五类传输速度最高,用于最具关键性、实时性最高的人身安全系统,包括FlexRay和Byteflight等。
本文将主要讨论LIN总线技术规格及在门控系统中的应用实例。
表一车载网络总线标准

LIN技术概况
LIN总线全称为区域互连网络(Local Interconnect Network),是一种结构简单、配置灵活、成本低廉的新型低速串行总线,和基于序列通讯协议的车载总线的子集系统(Sub-bus System)。
LIN总线为主从节点构架,即一个主节点(Master Node)最多可支持16个从节点(Slave Node);在从节点中不用晶振(Crystal Oscillator)或陶瓷谐振器(Ceramic Resonator)时钟,也能做到自同步性。LIN基于UART / SCI接口协议,可实现极低的软硬件成本;其信号传播时间可预先计算,以满足传输的确定性。总线电缆的长度最多可以扩展到40米左右,数据传输率可达 20 kbps。
1999年,LIN 1.0版推出后,不断有新版本出现(LIN 1.3、LIN 2.0),持续改进了LIN总线的性能与适用性。美国汽车工程师协会(SAE)下属的车辆架构任务组(Task Force)也基于LIN 2.0提出J2602规范,此举让LIN从节点所需要的软件代码长度缩短,进一步降低了LIN 2.0中软件单元的复杂性,可实现更高效的系统配置。此外,主流厂商也会针对LIN的性能推出改进版本或技术,例如意法半导体的LINSCI。
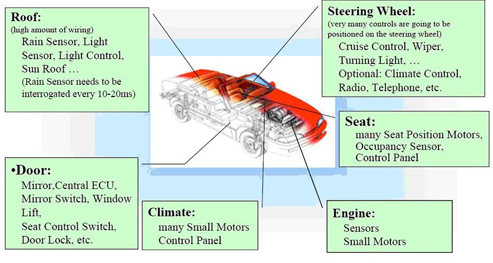
图一LIN总线应用领域
LIN主要用作CAN等高速总线的辅助网络或子网络,能为不需要用到CAN的装置提供较为完善的网络功能,包括空调控制(Climate Control)、后视镜(Mirrors)、车门模块(Door Modules)、座椅控制(Seats)、智能性交换器(Smart Switches)、低成本传感器(Low-cost Sensors)等。在带宽要求不高、功能简单、实时性要求低的场合,如车身电器的控制等方面,使用LIN总线可有效的简化网络线束、降低成本、提高网络通讯效率和可靠性。
LIN网络架构
如上文所述,LIN网络基于主从节点构架而形成网络拓扑结构。主节点需要向从节点发出周期性的检测信号,检测结果由从节点反馈给主控制器。其中周期根据事件检测的实时性要求而设定。
如图二所示,LIN的信号由一个由主任务提供的标头(Header)和由从任务处理的响应部分(Response)构成。标头包含一个13位的同步间隔字段(Synch Break Field)、一个由主任务产生的同步字段(Synch Field),以及一个辨识字段(Identifier Field)。其中每一个字节字段都以串行位元组方式发送,起始位的第一位为“0”,而终止位为“1”。由主任务执行的信号标头会依整个LIN丛集的进度表决定每个信号的传输时间,以确保数据传输的确定性及避 免网络超载的危险。在LIN网络中只有主节点采用晶体振荡器来为系统提供精确的基本时钟,此时钟会嵌入上述的同步字段中,让从任务能与主节点时序同步。LIN信号的响应部分包含一个数据域位(Data Filed),长度为2 / 4 / 8个字节,和一个长度为一个字节的验证字段(Checksum Field)。
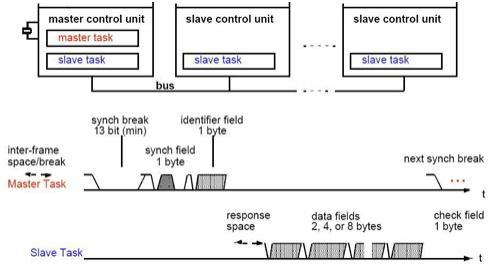
图二LIN信号结构示意图
LINSCI
LINSCI可以集成在8位MCU中,可实现标头侦测(Header Detection)、指示器(Identifier)和非相关字节过滤(Irrelevant Byte Filtering)、延伸性错误侦测(Extended Error Detection)和再同步化(Resynchronisation)等功能。其作用是使从设备的LIN总线功能更有效地发挥。
LINSCI也可以实现更高的精度。LIN总线的波特率(Baud Rate)预定标器(Prescaler)一般为8位整型值,分辨率有限,使得很难达成标准SCI位时间取样原则所需要的误差率为2%的准确性。LIN总线波特率一般为10kbps和20kbps,如果按20kbps计算,假设CPU频率为8MHz,由于LIN的频率宽容度为15%,量化错误将达到2.33%。LINSCI的预定标器则以12位无符号(Unsigned)定点值(即LDIV)代替8位整型值,量化误差则可下降到0.15%。
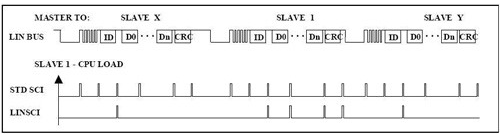
图三LINSCI数据结构图
实现LIN系统的最优化包含许多方面因素。虽然以标准SCI所建立的LIN网络已具备极佳性能,但LIN数据传输所需要的频宽和CPU负荷,应用上所需的频率准确性,以及LIN界面的稳定和有效性等都是应该考虑的因素。此外,硬件技术上的强化也十分必要。
ST的LINSCI即可通过这些手段实现更高的效率和更低的成本。首先,经过强化的硬件SCI端口减少了CPU负载,相应提高了系统效能。低成本主要由高集成度获得,其内部集成了1MHz震荡器、带有运算放大器的快速10位ADC,以及带有低电压检测器的可配置重启电路,简化了外部电路和系统设计,降低了制造成本。同时,8KB的扩展内存能在单一供给电压下操作,除了提供更快速的编程能力,还降低了电路板的复杂程度。
汽车门控系统架构实例
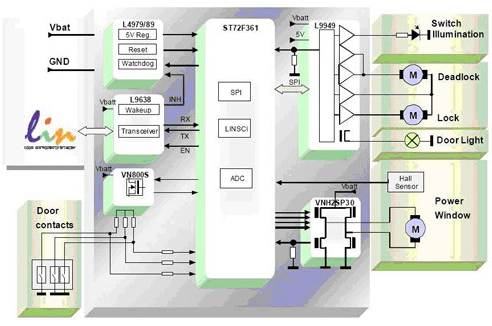
以汽车门控系统举例。如图四所示,目前中高档车型的门控系统主要包括车门锁(Lock)、防盗门锁(Dead Lock Latch)、动力车窗(Power Window)、踏脚灯(Footstep light),及切换面板照明(Switch Panel Illumination)等。其主节点为一个与车体CAN网络相连的中央车体控制单元(Central Body ECU),每个车门都有一个车门模块,即按四门的车身则为DM-Driver(司机位置)、DM-Passenger(副驾驶位置)、DM-RearRight(右后门)和DM-RearLeft(左后门)提供门锁和动力车窗等功能;另外两个前门还有MMR和MML左右后视镜控制模块。驾驶端的中央切换面板(Central Switch Panel)是一个独立的从节点,控制所有的动力车窗、手动门锁及后视镜等功能。
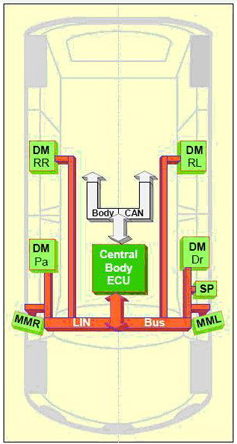
图四LIN网络门控系统示意图
汽车门控系统的应用场景对LIN网络提出了以下需求:当主控器收到从遥控钥匙发出的有效信号时,必须要启动门控系统,从节点通常通过CAN总线接收;当正确的钥匙打开前门时,也同时启动门控系统;从节点会直接反应而不需经由与主控器的通讯;切换面板的询问动作(Polling)功能,以确保响应对各个驱动装置控制,如动力车窗、后视镜调整、门锁等的主动式切换;对所有从节点的询问功能,以得到车窗升降的位置状态,以及车门的开关情况;以及系统对所有从节点的睡眠模式控制(即电池供应操作模式)等。因此门控系统的MCU也需要与上述功能相符,例如必须针对车窗的升降提供防夹(Anti-Pinch)功能、马达的PWM控制及车窗位置监控;能以SPI接口来控制门锁马达;对于车钥匙的拔出及开门的动作,能够提供电源供应模式的接触式监控,以及对后视镜及切换面板的操控功能等。
图五门控模块功能架构图
对上述功能的参数设置上,也有一些需要考虑的因素,例如时序的准确性和动作的实时性等。以手动打开汽车门锁的动作为例,从钥匙插入门锁到打开,需要快速的响应,可接受的延迟必须小于200ms。而在此期间,传动马达大约需要100ms打开门锁,因此留给MCU来完成从低功率模式启动、侦测到钥匙,并触发传动装置等动作的所有时间只有100ms。LIN总线波特率一般为10kbps或20kbps,如果按最快的20kbps计算,为保证数据传输的成功,则CPU的响应时间必须小于1ms。此外,针对系统 的安全性(如防夹)和便利性(如门锁侦测)等功能,都会有实时性的要求。
时序的准确性是为了实现正确的运作和流程。车门模块需要一个宽容度小于3%的时间参考,车窗防夹(Anti-Pinch)功能的复杂算法就需要这种准确性。
功耗与节能是对于多数ECU来说是十分关键的因素。以门控系统来说,系统在车辆熄火以后仍需进行间隔性的监控询问动作,会造成电力的持续消耗。而监控的延迟间隔设定很难取舍,因为时间间隔太长,则会造成反应延迟;太短的话,又会增加系统的功耗。
故障安全设计
故障和安全也是系统设计的重点,例如短路时总线线路的故障安全(Fail-Safe)机制。因为LIN总线与车体CAN总线系统相比,不具有容错性能(Fault Tolerant),因此每个节点必须有能力分辨出短路的总线线路,同时反应动作必须遵循特定的程序。
L9638是ST推出的LIN收发器,可提供额外的安全故障功能,可有效处理短路等故障。当MCU发现短路的LIN总线线路,ECU可自关闭;而收发器在消除短路状况后仍能够重新启动。
结论
通过灵活的配置,LIN可在多种应用中发挥全面的性能。例如将LIN协议以硬件方式建置(LINSCI)可以增加系统的可靠性和简化LIN的驱动程序码。MCU的设计也是一大关键。以ST72F361为例,它在标准MCU上提供先进的SCI接口,并支持LIN的功能,除了能降低CPU的负荷外,也能省却较高成本的精准时序资源。
LIN总线属于低速率传输标准,不具备CAN总线的性能,主要定位于CAN的关键性应用以外的场景中(高速、高效率、高容错性能等)。设计车辆电子系统时,需要根据具体的需求和技术要求合理选用适合的技术标准,才能让LIN和CAN发挥自己特有的优势,并节省成本。LIN总线以其低成本及高可靠性赢得了独特的市场空间,预计在欧洲新出厂的车辆中,LIN总线的应用将占有相当大的比重。
责任编辑:gt
-
电源
+关注
关注
184文章
17724浏览量
250268 -
汽车电子
+关注
关注
3026文章
7963浏览量
167074 -
总线
+关注
关注
10文章
2887浏览量
88108
发布评论请先 登录
相关推荐
基于LIN总线的车身控制系统的设计






 工商网监
工商网监
评论