 游动微纳米机器人重大突破实现了治疗脑胶质瘤
游动微纳米机器人重大突破实现了治疗脑胶质瘤
“此前,还房贷等因素是我不断向前的动力,在入选《麻省理工科技评论》‘35 岁以下科技创新 35 人’中国区榜单后,我收到很多患者及家属的来信,因此我希望游动微纳米机器人能挽救更多生命,甚至有患者说如果无法治愈他们,用他们的身体作为人体实验材料也可以,只要能为后人的治疗提供希望,这给我很大的使命感。因此我要继续集中精力不断突破、回馈社会,也不负 TR35 中国榜单的责任。”
谈及最近刚发表的论文成果,2019 年 “35 岁以下科技创新 35 人” 获得者、哈尔滨工业大学教授吴志光告诉 DeepTech。
近日,由哈工大微纳米技术研究中心博士生导师贺强、和吴志光担任共同通讯作者、该校 2016 级博士生张红玥担任第一作者的论文,以《双响应生物杂化中性粒细胞机器人用于主动靶向递送》(Dual-responsive biohybrid neutrobots for active target delivery)为题在线发表于《科学机器人》(Science Robotics)上,本次研究首次实现了游动微纳米机器人治疗脑胶质瘤。

图 | 相关论文
研究中,吴志光研发出一款游动微米机器人,其组成主要包含天然中性粒细胞、大肠杆菌细菌膜、药物以及磁性材料的水纳米水凝胶,整体结构呈现层叠状。因其具有额外的自推进游动能力,因此可把药物主动游动到脑胶质瘤区域。
图 | 微米机器人
“这个故事可能有点长”
关于机器人结构的由来,吴志光说 “这个故事可能有点长”。
常规的药物递送如打针、或吃药,都是药物分子、或载体在血液等流体中扩散进行的,这些药物分子或载体随血流等生物流体的扩散,存在着无法控制自己顺利到达病患区域的问题。
而只有流到病患区域,才有一定机会与病患细胞、或组织发生反应并进行治疗,因此这种递送方法非常被动。
自 2004 年起,业内就已发展出多种化学和外物理场(光电磁热等)驱动的游动微纳米机器人,这些机器人可在水中进行高效游动,但是人体体内环境非常复杂不仅仅是水,尤其人体内有多种生物屏障,这些生物屏障可以保护人体免遭外源细菌和病毒的侵入,但也阻碍着机器人向病患区域的药物递送。
早期的游动微纳米机器人,基本都是基于微机电系统(MEMs)等构件,自身材料主要由金属、金属氧化物以及人造聚合物构成。
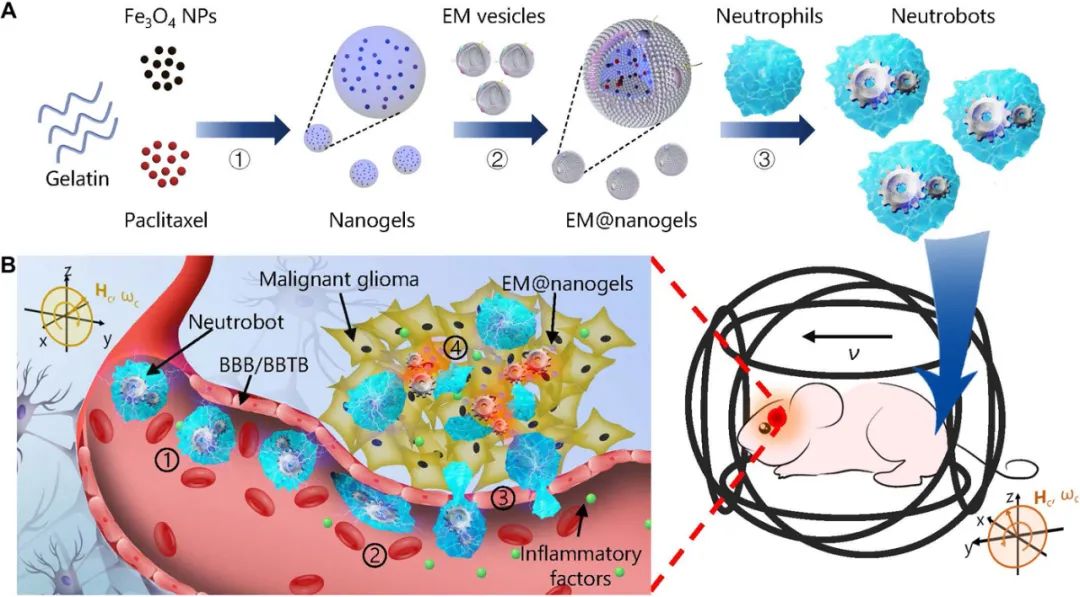
图 | 体内双反应中性机器人的活性疗法示意图
可以想象,这样的微纳机器人进入体内后,首先它不能降解,这无疑会增加很大的危险性;其次在于它们是人体外源物质,一旦进入体内就会激发免疫系统,免疫细胞会去攻击它们,因此生物相容性比较差,这样就是出师未捷身先死,还没来得及开展生物医学工作,就已经被人体免疫系统干掉。
为解决上述问题,他想到了天然细胞。一直以来,吴志光团队都在研究基于天然细胞的游动微纳米机器人,之前他曾开发出基于红细胞的机器人,后来因为想利用其它细胞的生物能力,他就想到了中性粒细胞。
据悉,中性粒细胞是一种免疫细胞,它能自发地运动到发生炎症的地方,还具备穿越血脑屏障等功能。
一开始,他的想法是制备一些载药的磁性粒子,然后让中性粒细胞吞噬进去,结果发现外源磁场难以驱动游动机器人,主要是因为磁性粒子吞噬量太少,以至于磁性太弱。
图 | 机器人的治疗示意过程
研发微纳尺寸机器人,首先要解决的是驱动问题,许多宏观世界的驱动方法在微观世界里却难以实现。他曾表示:“比如你躺在浴缸里,感觉浴缸里都是水。如果缩小成纳米尺度,你身边就不是水,而是一种非常浓的糖浆,所以你无法打破时间对称性的去实现运动。”
事实上,自然界有很多微纳米尺度的物体都能实现游动,比如分子马达、生物马达、细菌、精子等,它们可通过在摆动过程中、产生的不对称区域流体场,来实现向前运动。
图 | 游动的细菌
基于上述原理,吴志光采用化学方法,将原子组装成微纳米的结构,在化学场、外光场和磁场下实现了可控游动,甚至可以引导它们游动到目标细胞。
研究中,他想到中性粒细胞喜欢吞噬细菌等外源物质,所以就在磁性载药粒子表面覆盖了一层大肠杆菌细菌膜,从而让这种粒子伪装成大肠杆菌,这样中性细胞就会提高对磁性载药粒子的吞噬量,不仅能实现在外源磁场下的驱动,还能维持药物在中性粒细胞内的稳定,防止药物在到达胶质瘤之前被泄露。
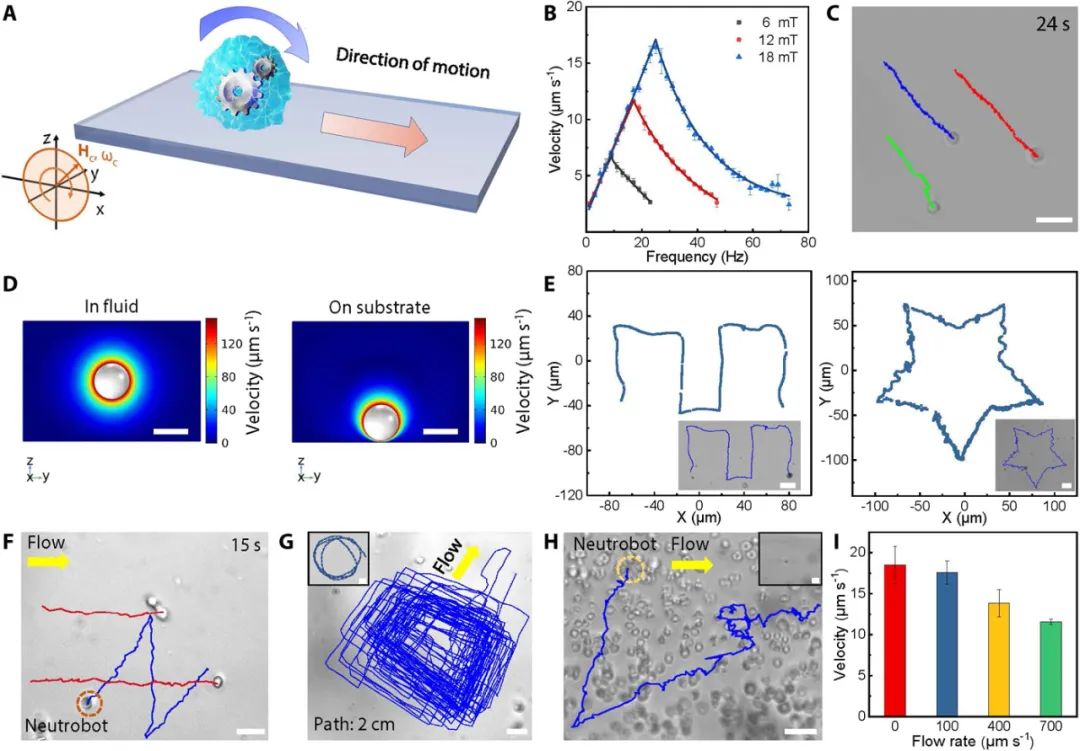
图 | 中子机器人的可控磁致动
此外,本次研究还首次实现了游动微纳机器人对胶质瘤的主动递送,Science Robotics 也发表同期焦点文章介绍了本次成果。
胶质母细胞瘤(GBM)是最难有效治疗的癌症之一,中国的发病率及死亡人数均占全球首位,主要原因在于缺乏精准疗法,而且由于血脑屏障、和血肿瘤屏障的存在,进入颅内肿瘤部位的治疗途径非常有限。
如何让药物突破血脑屏障、实现药物的主动靶向递送、提高药物对胶质瘤的疗效,也成为胶质瘤医疗领域长久以来的瓶颈难题。
针对该难题,该团队开发了上述基于体内免疫细胞的游动微纳米机器人。
该机器人可有效稳定地携带紫杉醇等抗癌药物,依靠自主研发的控制系统,可将机器人引导到脑部区域。抵达脑胶质瘤区域的机器人,能自主感知病原信号、并穿越血脑屏障后游动到病患位点,最终将药物精准地释放到病患处,从而显著提高药物靶向效率。
一言以蔽之,本次成果是确立基于免疫细胞的游动微纳米机器人、可作为潜在脑胶质瘤精准疗法的标志性研究。
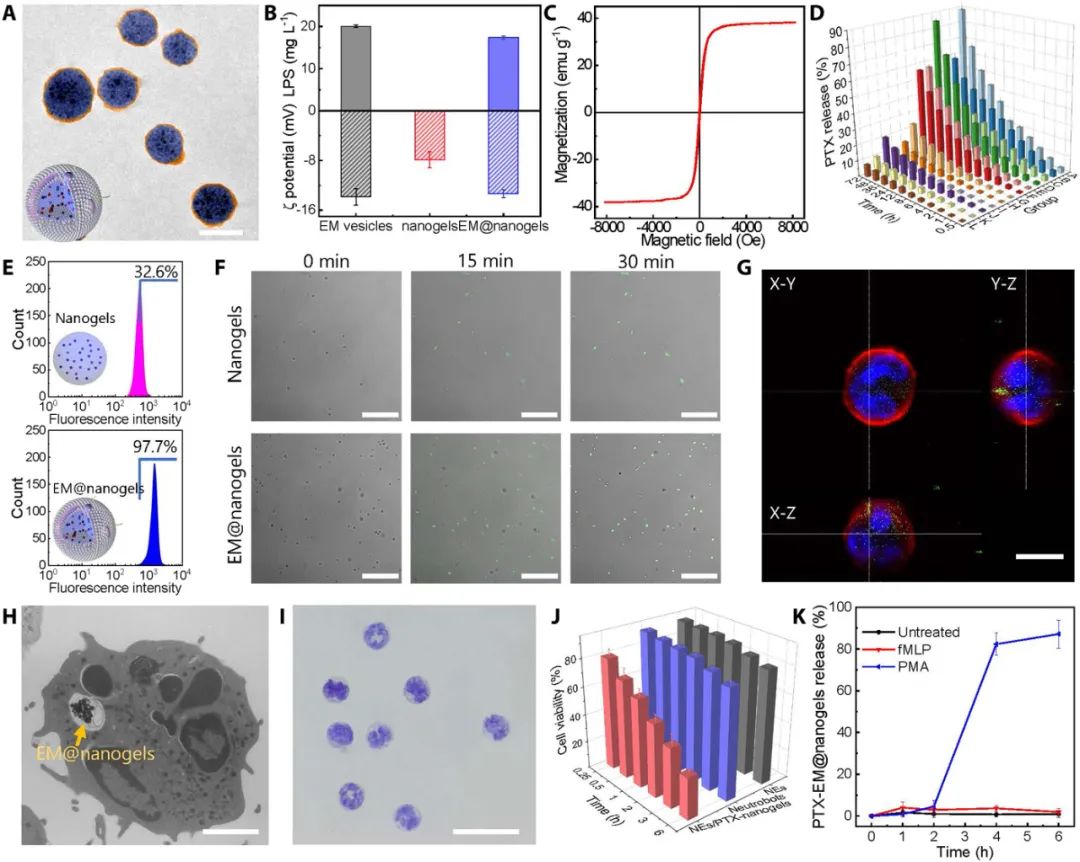
图 | 双反应中性机器人的制备和表征
十多年研究成果集大成,高科技手段实现纳米级别组装
组装纳米级别的机器人,对于普通人来说简直不敢想象,这要归功于吴志光的博士研究生导师贺强。自吴志光博士毕业后,他就一直在贺强团队工作。
2010 年,贺强建立了中国第一个游动微纳米机器人研究团队。在本次项目中,吴志光使用了化学可控组装技术、细菌膜伪装技术、细胞杂化技术、外源匀强旋转磁场控制系统等技术,而这也是他们十多年来研究成果的大集成。
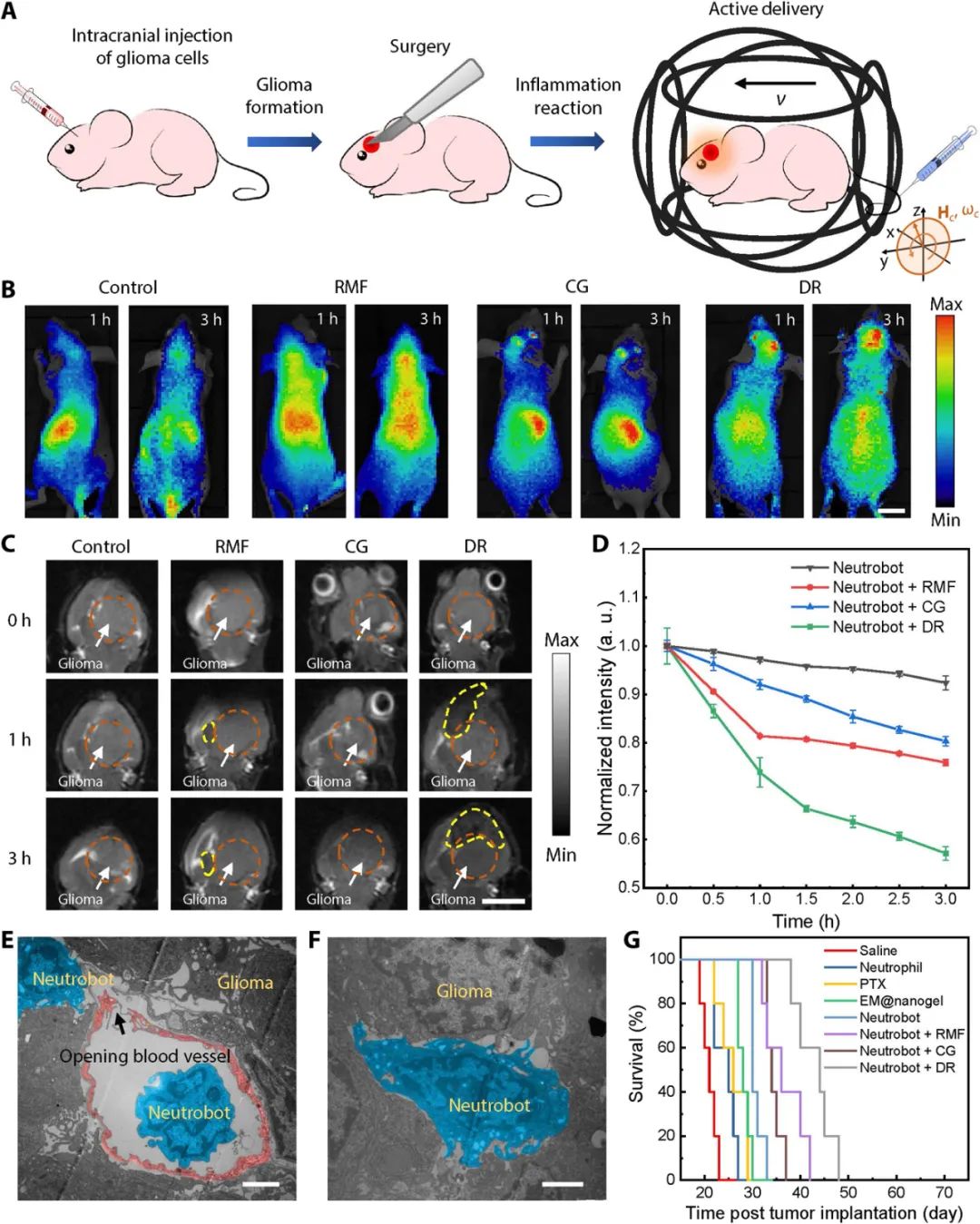
图 | 中性机器人向术后神经胶质瘤的主动输送
不过,吴志光也表示,医疗纳米机器人目前尚处于研发试验阶段,还不能进入临床实用,许多配套技术有待开发完善。
目前,游动微纳米机器人集群在活体动物内的成像就还是很困难,第一是因为机器人尺寸过小,低于临床医疗成像技术分辨率;第二是机器人与生物组织在生物影响下的对比度不够大。
他认为本次机器人还有更高的提升空间,未来他们将开展更多的优化参数研究,以便提高疗效。
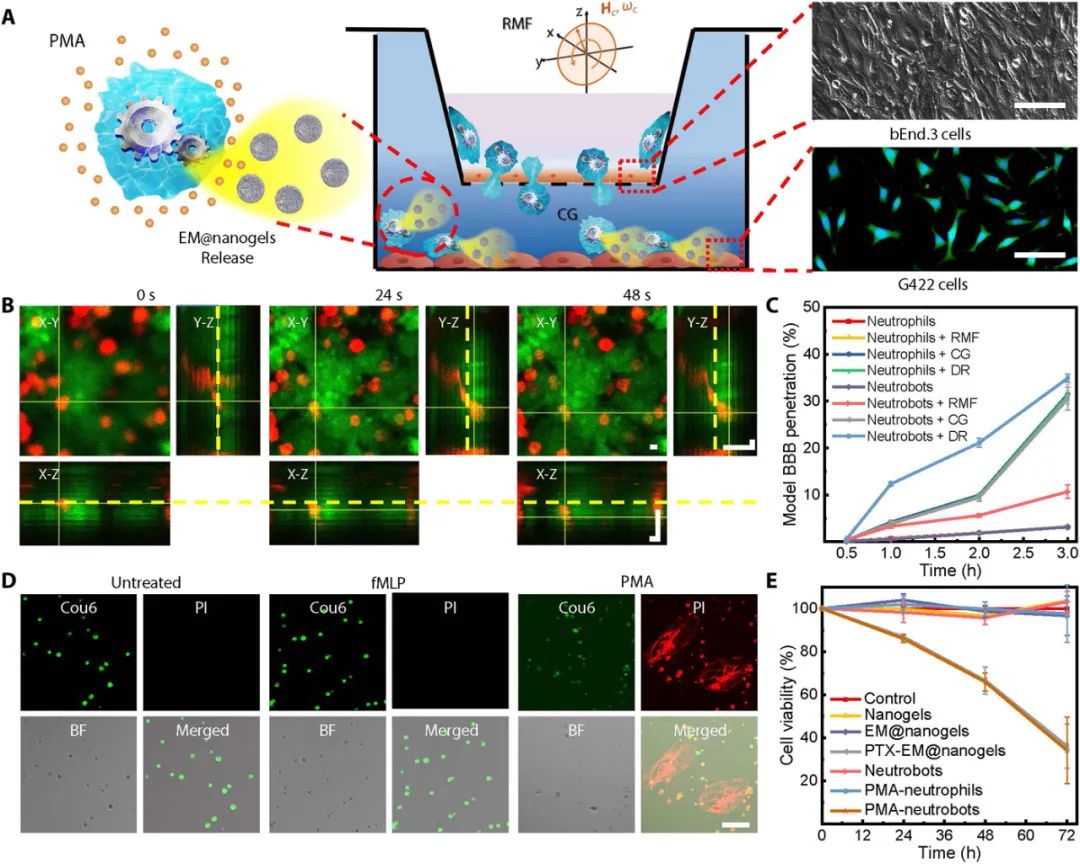
图 | 体外将中性粒细胞主动递送至神经胶质瘤细胞
美国未来学家、谷歌工程总监雷・库兹韦尔曾预言说,“医疗纳米机器人未来将会把人脑和云脑 (云计算系统) 连接起来,2030 年纳米机器人就将定居在人体内,成为人机融合的一部分”。
对此吴志光评价称,2030 年达到这样的水平貌似还是有点难,2030s 以内勉强有戏。但他本人希望有一天能够构建出游动微纳米机器人的人造免疫系统,很多疾病如癌症、HIV 等,较大程度上是人体免疫系统与疾病侵袭之间失衡导致的。
如果能在人体内构建游动微纳米机器人集群,这些微纳米机器人就可在人体内随意游走、并进行实时控制治疗疾病,届时癌症、HIV 等疾病就能像感冒一样可被轻易治疗。
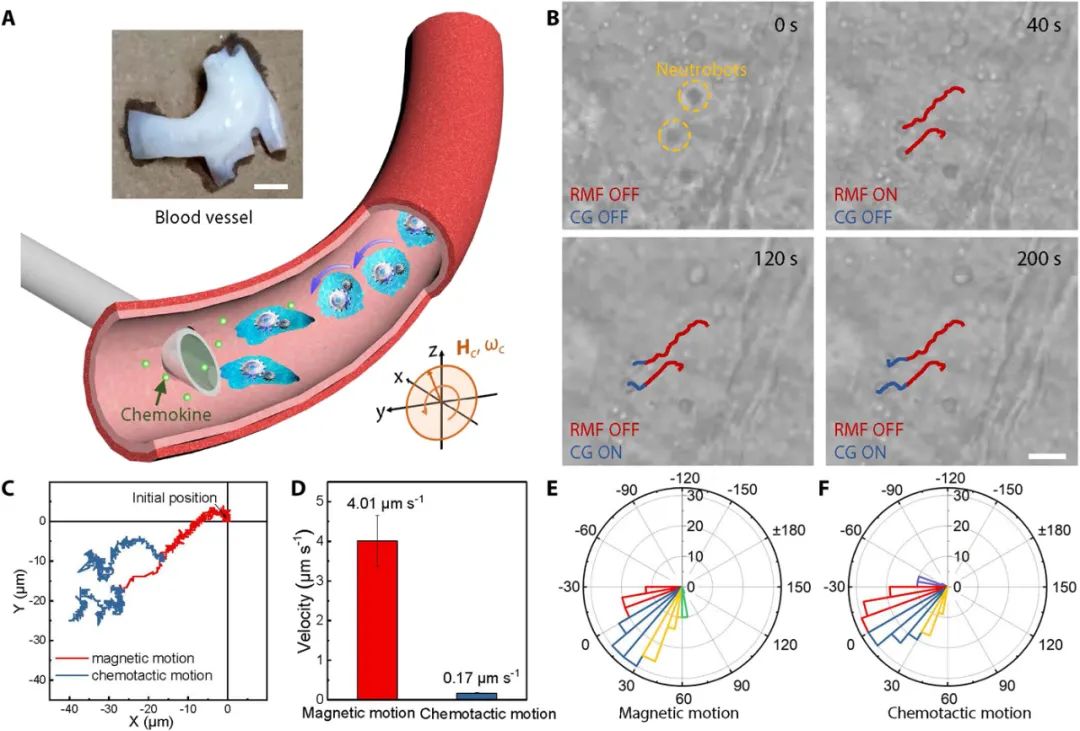
图 | 中性机器人的双响应血管内运动
目前,吴志光已经开展了针对具体疾病如胶质瘤的治疗研究。下一步他将开展更多的临床前试验研究,比如猪和兔子等更大型的动物,为以后临床试验做准备。
图 | 微纳米机器人在医疗领域的应用最具期待
未来他还将继续开发游动微纳米机器人的研究。概括来说,游动微纳米机器人不仅针对胶质瘤,更是一个脑部治疗平台。在不久的将来,游动微纳米机器人将能运输更多诊疗药物,治疗范围也将拓展到癫痫、中风偏瘫等其他脑部疾病。
编辑:lyn
-
医疗
+关注
关注
8文章
1840浏览量
59001 -
纳米机器人
+关注
关注
0文章
43浏览量
11734
原文标题:十年磨一剑,游动微纳机器人迎来重要进展!哈工大科学家研制可向药物精准释放靶向胶质瘤的微纳机器人
文章出处:【微信号:deeptechchina,微信公众号:deeptechchina】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
Figure AI宣布终止与OpenAI合作,称已在AI方面取得重大突破
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
重大突破!优刻得×脑虎科技脑机接口临床试验取得新进展

【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
基于漩涡湍流辅助的微流控平台,可实现类精子结构的微型机器人一步成型

全国首发!贡嘎一号人形机器人发布
众擎机器人发布全尺寸人形机器人SE01
星动纪元科技推出首款产品级人形机器人STAR 1

Al大模型机器人
人形机器人的未来:从英伟达到特斯拉的机器人革命
据新华社等多家媒体报道!畅能达科技实现散热技术重大突破!
特斯拉人形机器人研发取得重大突破,预计2025年实现量产
英伟达发布人形机器人基础模型
用于机器人化血管栓塞的磁性柔性微纤维机器人研究






 工商网监
工商网监
评论