 分布式多机器人共享单一信道的通信机制实现与应用分析
分布式多机器人共享单一信道的通信机制实现与应用分析
作者:李俊萍,孙汉旭,贾庆轩
1 引言
无线局域网(Wireless local-area network, WLAN)是计算机网络与无线通信技术相结 合的产物,自1987 年建成世界上第一个实验性无线局域网以来得到了飞速的发展。WLAN 是一种典型的点对多点网络,可在较小的范围内提高高速数据服务。
无线局域网技术具有传统局域网无法比拟的灵活性,通信范围不受环境条件的限制,网 络的传输范围被大大拓宽。此外,无线局域网还具有抗干扰强、网络保密性好的特点。对于 有线局域网中的诸多安全问题,在无线局域网基本上可以避免。而且相对于有线网络,无线 局域网的组建、配置和维护都较为容易。
随着机器人技术的发展,人们对机器人的要求不再局限于单个机器人,而将更多的精力 转移到多个机器人组成的系统上。多机器人协作与控制研究的基本思想就是将多机器人系统 看作是一个群体或一个社会,从组织和系统的角度研究多个机器人之间的协作机制,从而充 分发挥多机器人系统各种内在的优势。为了有效地交流和协商,必须解决机器人之间信息处 理与传输问题,即多机器人通信问题。在分布式多机器人系统中,无线通信网络的节点由单 个机器人充当。
在计算机网络中广泛应用的物理链路形式、传输方式、通信协议等为多机器人系统的通 信机制提供了基本的解决方案,但由于多机器人系统的实时性、可靠性等方面具有特殊要求, 所以针对适用于多机器人系统分布式控制结构的通信机制的研究具有重要意义。主要包括通 信协议、网络拓扑结构、通信内容和语言等。
2 移动机器人通信方式及通信协议
一般来说,机器人之间的通信(如图1 所示)可以分为隐式通信和显示通信两类。
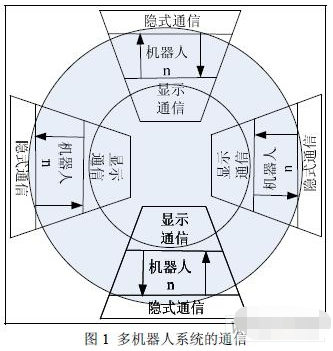
在使用隐式通信的多机器人系统中,各机器人不存在相互之间数据、信息的显示交换, 所以多机器人系统可能无法使用一些高级的协调协作策略,从而影响了其完成复杂任务的能 力。而机器人的显式通信,利用特定的通信介质,通过某种共有的规则和方式实现特定含义 信息的传递,可以快速、有效的完成各机器人间数据、信息的转移和交换,实现许多在隐式 通信下无法完成的高级协调协作策略。
1987 年,由IEEE 802.4 组开始在IEEE 802 委员会中进行无线局域网的研究。1997 年 形成了第1 个无线局域网的标准802.11。目前,无线局域网标准由IEEE 802.11 发展到802.11、 802.11a、802.11b 发展到802.11s。802.11b 工作于2.4GHz ISM(工业、科技、医疗)频带, 采用直接序列扩频和补码键控,能够支持5.5Mbps 和11Mbps 两种速率,可以与速率为1Mbps 和2Mbps 的802.11 DSSS 系统交互操作。
3 多移动机器人网络拓扑结构研究
多机器人系统依靠几个机器人的简单组合并不能充分发挥其优势,必须确定机器人之间 逻辑上和物理上的信息关系和控制关系,保证多机器人系统中信息流与控制流的畅通,为机 器人之间的活动、交互作用提供框架。合理的群体体系结构可以使多机器人之间进行有效的 合作,增强系统的容错性、鲁棒性和灵活性。

多机器人系统的群体体系结构可以分为集中式(centralized)和分散式(decentralized) 两种。分散式结构又可以进一步划分为分层式(hierarchical)和分布式(distributed)结构。 见下图2 所示为多机器人系统群体体系结构。集中式结构(图2-(a))的优点在于,理论 背景清晰,实现起来较为直观,但容错性差、灵活性差、适应性差,还存在主控单元和其他 机器人之间的通信瓶颈问题。分布式结构中没有主控单元,如图2-(b)所示,具有灵活性 和适应性强的优点,但是要注意避免各个个体片面强调“个性”,以自我为中心,过分强调自 己任务的重要性,而导致过多占有资源的情况,使得任务完成效率低下。分层式结构与分布 式结构的不同之处在于前者存在局部集中,如图2-(c)所示,它是介于集中式结构与分布式 结构之间的一种混合结构。
4 多移动机器人的通信模型研究
计算机系统中,目前常用的通信模型有“客户/服务器”(Client/Server,简称C/S 模型)模 型和“点对点”模型(Point-to-Point,简称PPP 模型)。在基于C/S 模型的通信系统中,计算 机进程间的通信必须通过通信服务器“中转”;客户进程间无直接通路,通信服务器的错误会 导致整个系统的崩溃,因此,可靠性较差,不能适应多机器人实时通信系统的要求。而点对 点通信模型是将C/S 模型由中心结构改变为分布式结构,一个通信节点进程的出错将不会影 响其它节点进程,这有助于提高系统的可靠性;两两进程间存在直接通路,可进行直接通信, 有助于提高效率。然而,PPP 模型不适用于包含控制、调度、管理等任务的应用。
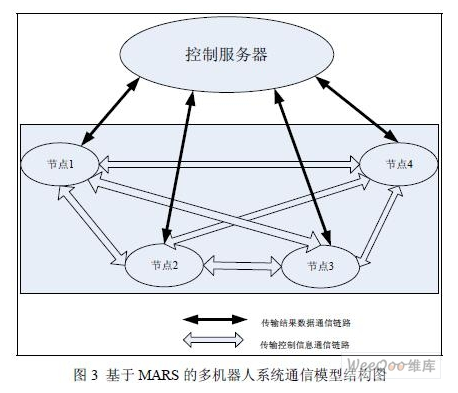
由于战争环境的恶劣复杂性以及特殊性,为增强多机器人系统适应环境的能力,综合比 较C/S 和PPP 模型,我们提出了一种能支持系统复杂通信行为的基于C/S 和PPP 模型的混 合模型结构,其结构框图如下图3 所示。此WLAN 网络可容纳不多于256 个节点,图3 以 4 个移动机器人为例,其中的节点即代指移动机器人。
5 系统设计及实现的关键技术
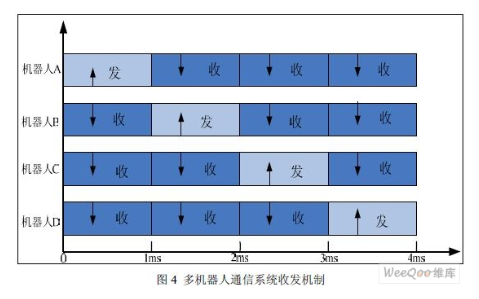
本文设计了一种分布式多机器人共享单一信道的通信机制。组网方式见图3 矩形框部 分所示。各个机器人节点之间的关系是对等的(Peer To Peer)、分布式或者无中心的,可 以进行全互通式通信。这种网络随时需要随时构建,因此该工作模式被称作特别网络或自组 织网络(Ad Hoc Network),具有组网迅速、使用方便、抗毁性强等特点,多用于临时组 网和军事通信中。系统中各节点收发机制如下图4 所示。在信道中,采用时分多址技术。 各机器人共享频率资源,以时隙的不同来区分地址,避免机器人间的通信冲突。系统帧结构 由一个大帧,每大帧有4 个小子帧构成。每子帧由导码、消息数据和保护时间构成。不同的 系统需求下,信令数据可以灵活选择。
5.1 双工方式
在无线电通信领域,使用的双工模式主要有频分双工(FDD)和时分双工(TDD)两种。 FDD 采用两个对称的频率信道来分别发射和接收信号,发射和接收信道之间存在着一定的 频段保护间隔,适用于大区制的国家和国际间覆盖漫游;TDD 的发射和接收信号是在同一 频率信道的不同时隙中进行,加入一定时隙的保护时间以防止重叠,可在信道内灵活控制、 改变发送和接收时段的长短比例,在进行不对称的数据传输时,可充分利用有限的无线电资 源。根据两种双工方式的优缺点以及系统的性能指标要求,考虑到减小发射和接收端体积、 重量、提高频谱利用率以及系统的稳定性和可是现行,我们选用TDD 方式。
时分双工通信系统设计的关键是帧结构的设计,否则将造成通信无法正常运行。
5.2 多进制直扩
IEEE 制定的无线局域网的协议标准为802.11。802.11 的物理层有以下三种实现方法: 调频扩频(FHSS)、直接序列扩频(DSSS)、红外线(IR)。本系统采用直接序列扩频实现。
扩频技术一般是指用比信号带宽宽的多的频带宽度来传输信息的技术。故扩频通信抗干 扰能力强、隐蔽性好、具有多址能力、可抗频率选择性衰落。
直接序列扩频就是用一个宽带扩频信号或扩频码对已调的数据载波进行直接调制来实现带宽的扩展。在时分多址通信系统中,采用直接序列扩频技术来减少网内干扰、改善系统中存在的远近效应。而二次扩频的使用,通信系统的处理增益等于两次扩频的增益之和,使得系统能够获得较高的处理增益。
5.3 调制解调
从信号空间观点来看,调制实际上是从信道编码后的汉明空间到调制后的欧式空间的 映射或者变换,可以是一维的也可以是多维的,可以是线性变换也可以使非线性变换。主要 的调制方式有振幅键控(ASK),移频键控(FSK)和移相键控(PSK)三种基本方式。在 二进制调制中,在抗加性高斯白噪声方面,BPSK 最好;为了在有限的信道频带内传输高速 数据,采用了QPSK。
在通信系统中,载波解调有相干解调和非相干解调两种。本系统采用的相干估值解调属 于相干解调的范畴,可以传输更高的数据和提高系统可靠性。
5.4 同步技术
同步技术是扩频系统接收机的关键技术。一般数字通信系统的同步问题包括载波同步、 位同步、帧同步。而对于直扩系统,它的同步技术还包括PN 码同步。
比较常用的粗同步(即捕获)方法有基于相关器的串行捕获、基于相关器的并行捕获以 及基于匹配滤波器的并行捕获。而细同步(即跟踪)主要有两种方法,一是延迟锁相环 (Delay-Locked Loop,DLL)跟踪法,另一种是τ-抖动环(Tau-Dither Loop,TDL)跟踪法。 综合各种方法的优缺点及实际需求,在本系统中,粗同步的实现采用基于匹配滤波器的并行 捕获,将误差锁定到一个码片周期内;然后用加减脉冲法实现细同步的跟踪。
6 结论
本文提出了一个多移动机器人系统的自组织网络,着重讨论了多机器人系统的通信方 式、通信模型以及网络拓扑结构和相关实现的关键技术。基于上述技术的软件仿真和硬件平 台都已经验证了可行性和可操作性。
责任编辑:gt
-
WLAN
+关注
关注
2文章
657浏览量
73083 -
机器人
+关注
关注
211文章
28379浏览量
206912 -
通信
+关注
关注
18文章
6024浏览量
135949 -
计算机
+关注
关注
19文章
7488浏览量
87848 -
无线通信
+关注
关注
58文章
4564浏览量
143496
发布评论请先 登录
相关推荐
分布式软件系统
辰汉-如何实现服务机器人的运算与控制
嵌入式服务机器人控制系统能实现什么功能?
HDC2021技术分论坛:跨端分布式计算技术初探
分布式软总线实现近场设备间统一的分布式通信管理能力如何?

基于分布式控制系统的轮式智能机器人研究

单收发器分布式多跳认知媒体接入控制协议优化设计
分布式通信是什么 分布式网络搭建

Redis实现分布式多规则限流的方式介绍






 工商网监
工商网监
评论