 基于MSP430单片机实现六自由度机械手模块的设计
基于MSP430单片机实现六自由度机械手模块的设计
当代科学技术发展的特点之一就是机械技术,电子技术和信息技术的结合,机器人就是这种结合的产物之一。现代机器人都是由机械发展而来。与传统的机器的区别在于,机器人有计算机控制系统,因而有一定的智能,人类可以编制动作程序,使它们完成各种不同的动作。六自由度自动寻迹搬运机器人就是其中一种,这种搬运机器人不但能够代替人的某些功能,有时还能超过人的体力能力,可以24小时甚至更长时间连续重复运转,还可以承受各种恶劣环境,因此,搬运机器人是人体局部功能的延长和发展。
本设计主要应用单片机MSP430作为控制核心,直流电机、热释电型红外传感器等相结合的系统。它充分发挥了单片机的性能,其优点硬件电路简单,软件功能完善,控制系统可靠,性价比较高等特点,具有一定的使用和参考价值。
1 系统原理
1.1 自动寻迹模块的系统原理
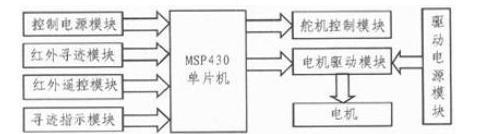
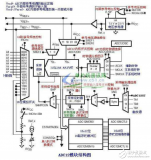
本设计中自动寻迹模块主要由单片机及其外同电路、红外寻迹电路、直流电机控制电路等组成。正常工作时,单片机循环检测红外寻迹电路输出信号,据此产生直流电机控制信号,当系统检测到工作方式发生改变时,系统进入相应方式。其原理框图如图1、图2所示。

图1 自动寻迹模块原理框图
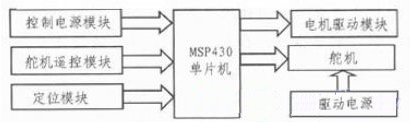
图2 自动寻迹模块原理框图
1.2 六自由度机械手模块的系统原理
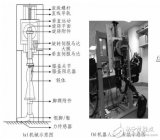
系统的设计采用模块化的方法,将机械于划分为基座、手臂、手腕、手部4部分。控制器以MSP430单片机为主控制器,具体控制部分框图见图3。
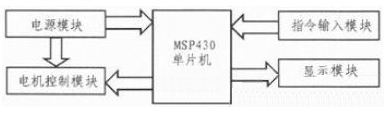
图3 六自由度模块的原理框图
2 系统设计
2.1 自动寻迹模块硬件设计
1)基本单片机系统
寻迹机器人系统的控制核心,一般情况下以MSP430单片机片内的基本硬件资源为主,有必要时再扩展部分外部器件。在本设计中需要完成的控制比较简单,以单片机片内的基本硬件资源完全可以实现,因此不需扩展。
2)放大信号电路
采用LM324控制,LM324是四运放集成电路,它采用14脚双列直插塑料封装,内部包含四组形式完全相同的运算放大器,除电源共用外,四组运放相互独立。
3)电动机驱动电路
所选用的电动机为普通的直流电机,在MSP430单片机的控制下,可接一个电机驱动芯片或者通过其他的一些原件可使电机转动。本系统为了设计简单,采用其他方式代替了电路驱动芯片。
2.2 六自由度机械手模块硬件设计
六自由度机械手是由6个伺服电机驱动的机器手臂。除了构成手臂的4个关节、手腕1个关节外,再加上手部的夹持,实现了1个机械手的机械结构。
该控制模块采用5 V直流电源分别为单片机和机械手臂的电机供电,电路包括手动复位电路、晶振电路、矩阵键盘、用以控制单片机转角的控制的独立键盘、伺服电机接入口,并可通过显示屏显示被选电机标识号和该电机转动的角度。
3 软件设计
本系统的软件设计面向硬件,选用C语言编程。最主要部分是单片机控制电机转动(包括正转反转)、时间的延迟和PID算法,具体的设计流程图见图4和图5。
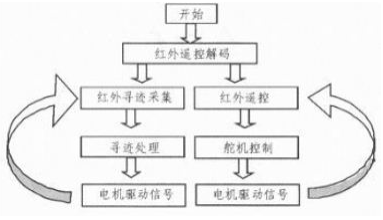
图4 自动寻迹模块控制流程图
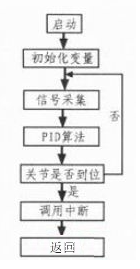
图5 六自由度模块流程图
4 系统调试
1)程序编完后,对代码仔细逐行检查。检查代码的错误,建立自己的代码检查表,对经常易错的地方进行检查。检查代码是否符合编程规范。
2)调试程序看是否能仿真,如果运行正常再将在编译器中调试好的程序烧写至单片机。
3)在接上电源时,观察整体电路是否按照预计设计的运作,电机是否正转,电机是否反转等。可根据电路的运行情况推测出程序出错的部分,修改程序后再经过编译器调试后烧到单片机,反复检测直到能工作完全正常。
5 结束语
本系统为单片机的寻迹机器人系统,主要应用单片机MSP430作为控制核心,直流电机、舵机、一体红外接收头等相结合的系统。这个系统软硬件设计简单,易于开发,严格控制各种元件的采购成本,所以价格低廉,安全可靠,操作方便。
责任编辑:gt
-
集成电路
+关注
关注
5406文章
11736浏览量
364941 -
单片机
+关注
关注
6050文章
44726浏览量
641835 -
运算放大器
+关注
关注
215文章
5083浏览量
174301
发布评论请先 登录
相关推荐
利用单片机MSP430作为控制核心实现六自由度自动寻迹机械人的设计
基于两自由度髋关节运动和MSP430单片机的机器人假肢控制系统
MSP430单片机实践篇之MSP430单片机ADC模数转换操作
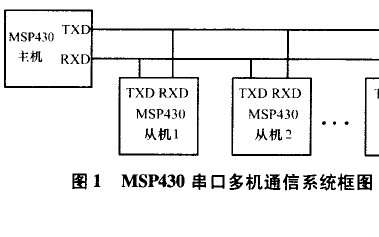
如何使用MSP430单片机进行多机串口通信的设计






 工商网监
工商网监
评论