 基于模拟CPG芯片在受损脊髓中的有效应用方案
基于模拟CPG芯片在受损脊髓中的有效应用方案
毫无疑问,伤断了脖子和脊梁是最让人悲惨的伤痛之一。如果脊髓断裂,大脑就失去了与身体其它部分联系的能力,四肢也就无法协调动作。但大多数人没有意识到的是:对于运动能力来说,第二个问题实际上比第一个更严重。鸡被割掉脑袋后仍可四下扑腾,这归功于脊髓的功能:大脑只负责发出运动命令,而对肢体运动本身来说是多余的。但若四肢无法彼此“联络”协调,则连简单的行走都不能进行。
约翰·霍普金斯大学的研究人员发现了解决该问题的一条途径。他们发现,所有动物(包括鸡)四肢的协调活动是由一个中枢模式生成器(CPG)“导演”的。传感器和执行器将信号传至脊髓的神经中枢并对输出做出响应。由于走路有循环往复的特性,脊髓神经学着协调输入和输出以产生一种规则模式:当动物学着走路时,脊髓神经变成一个CPG。所以,想使一个脊髓断裂的动物移动,你需要重新生成这种神经过程。
如果能用一个嵌入芯片实现上述过程,那么就可以通过控制开关实现行走,研究人员推论。
现在,这些研究人员证明了上述想法可以实现。在最近与加拿大阿尔伯塔大学的同事进行的一项实验中,他们利用一款带模拟神经元的芯片来控制一个暂时瘫痪的猫的行走。不仅芯片上的信号能用来激励肌肉,肢体的运动也能被检测并反馈给人造神经网络。以这种方式产生的运动也许并不十分自然,但它证明该概念是可行的。与更粗野的数字方式不同,这种模拟方案有潜力在不远的将来被实际植入到动物体内。
加州大学洛杉矶分校生理科学和神经生物学系教授Reggie Edgerton研究了运动神经控制和神经肌肉的可塑性(适应性和学习能力)。他认为这项新工作向前迈进了一大步:“它提供了一个紧凑装置,不仅能激励肌肉,还能根据四肢的运动和动力学反馈来调整激励幅度。”不应低估约翰·霍普金斯大学所克服的困难,他指出,“从现有数据中所能得到的最重要的一点也许是:在验证关于记录传感信息、对该信息进行处理、然后生成一个可被采用的相当成功的特定肌肉激励模式的概念方面,业界取得了一些有意义的进展。”
神经形态学方法
一直负责电子工作的约翰·霍普金斯大学副教授Ralph Etienne-Cummings已对基于CPG的运动进行了几年研究。通过与Iguana Robotics公司Tony Lewis的合作,他在2000年就证明了能用CPG来有效控制工程界和自然界的行走。Lewis和Etienne-Cummings共同搭造了一个小机器人:仅是由胯部支撑的一双腿。其膝盖可像钟摆一样凭借其自身的动力自由活动。
运动很简单。由Etienne-Cummings设计的模拟CPG芯片可产生一簇能驱动左/右胯前后活动的峰值信号。当达到行动极限时,胯上的位置传感器会向该芯片发送峰值信号,该信号用来修改CPG的输出,以便使左/右胯开始做相反的前后运动。本质上,传感器将腿部的实时物理信息反馈给CPG,CPG据此协调腿的动作。
这款独特CPG芯片通过一个模拟电容的充电/放电来进行工作,所以由胯部传感器极限位置所提供的峰值能使CPG更快充电(在第一阶段)、或更慢的放电。因为这将改变CPG的周期,所以,下一个“极限”峰值信号将发生在循环周期的另一个不同位置,从而再次改变其模式。但是,最终CPG模式会收敛于传感器峰值模式(一种被称为裹挟(entrainment)的过程),而行走模式也将被确定。因此,只要一条腿完全跨出去,另一侧的胯就会开始抓紧行动,产生一个与物理腿完全匹配的步伐。通过增加一个照相机,适当把输出转化到峰值信号然后反馈给CPG,研究人员还能使腿迈过障碍物。
在实验中,CPG芯片本身的功耗不到1mW。
约翰·霍普金斯大学的电子方案包括:一个模拟信号处理器芯片,用来处理送至CPG的信号;一个微处理器,用来控制发送给受控对象的输出;一个恒流激励器输出级。
从机器人到生物学
已在Etienne-Cummings的团队工作了几年的一位研究人员Jacob Vogelstein表示,对那些脊髓受损的患者来说,该方法的好处显而易见:目前患者的治疗手段过于原始。“可买到的商业化运动假体设备需要使用者在每次迈步时都按一下按钮。带有这种系统的专用行走器在左右侧各有一个按钮。当使用者想移动左脚时,需要按下左边按钮;而当使用者想移动右脚时,需要按下右边按钮。设备中没有传感反馈回路来控制运动。”
在实验室有更好的系统,他说,“但需要一台高速PC、一大堆信号处理硬件、一个模数转换器、以及用C写的专门软件。如果要将所有这些硬件塞入一个盒子,大概需要8立方英尺空间。”
与上述要求相比,约翰·霍普金斯大学的电子方案可被放在一块PCB上。大部分元器件都可从市面上买到:一个模拟信号处理器芯片,用来处理送至CPG的信号;一个微处理器,用来控制发送给受控对象的输出;一个恒流激励器输出级。当然,该系统的核心是模拟CPG芯片。在用猫进行的实验中,研究人员的定制设备有4组神经电路,用来协调4块肌肉区(左右后腿的屈肌和伸肌)。
与机器人试验一样,该方案利用了胯角度和触地反作用力(GRF)传感器向CPG发送信息,CPG防止了相对肌肉同时运动,从而在整体上协调了运动。该芯片曾被用于直接刺激一只脊髓被麻醉从而无法参与运动控制的猫的肌肉。
阿尔伯塔大学神经科学中心助教Vivian Mushahwar负责该活体实验。虽然实验中动物的运动缓慢,但她对该芯片产生的运动质量印象深刻。“动物行走看起来近乎自然,而且完全适应所行走的路面。这极其令人振奋并且非常新奇。过去所做的所有实验中,动物或者在原地踏步、或者只能走在平坦的、无障碍的路面上。CPG芯片支持在无法预知的地形上行走,这是生产能用在非实验室环境的日常生活中的行走功能系统的一个关键步骤。
下一步目标
Mushahwar的大部分工作与神经假体(neuroprostheses)相关,她对这项新工作的前景满怀激动和憧憬。“CPG芯片的奇妙之处在于,它可用于任何为行走而研制的功能性电子刺激系统。换句话说,它可被用于利用表面电极或植入导线来刺激屈肌和伸肌群的系统。源于神经元连接的灵活性、它们收到的传感信息、以及这些神经元的“学习”能力,该芯片可用于恢复脊髓完全损伤的病人的活动能力,或增加不完全受损的人的运动能力。
“我们未来的目标,就是把CPG芯片和脊髓内植入的微电子结合起来,而不是直接通过腿表面或植入腿内部的导线来激励肌肉。脊椎植入将分布在脊髓内横跨不到5cm的区间内,它将允许激活脊髓内负责产生腿部屈肌和伸肌交替运动的未损神经元网络群。由于无需在腿部肌肉内直接植入导线,CPG芯片与微电子植入在脊髓内的结合将显著减小电子刺激系统的体积。它还将产生比我们目前所能达到的更自然、更耐疲劳的行走。”她表示。
Vogelstein相信,电子方法是唯一可能会开花结果的方法。“从长期看,CPG芯片允许我们寻找一种可植入方案,但目前的数字技术却不容易被植入。CPG芯片与一台计算机比小得多,它所需要的功耗也要小得多。另外,因硅神经元的作用与生物神经类似,它有可能以自己的语言与脊髓和神经系统直接沟通。与基于PC的方案比,CPG芯片的不足之处是,它不如计算机灵活,但只要它能完成任务,就不需要灵活性。你永远不需要你的假体CPG芯片运行Windows。”
责任编辑:gt
-
传感器
+关注
关注
2552文章
51246浏览量
754850 -
芯片
+关注
关注
456文章
50967浏览量
424920
发布评论请先 登录
相关推荐
模拟芯片对于治疗脊髓受损者的解决方案
ESSE触控芯片在方案应用中遇到的问题怎么解决
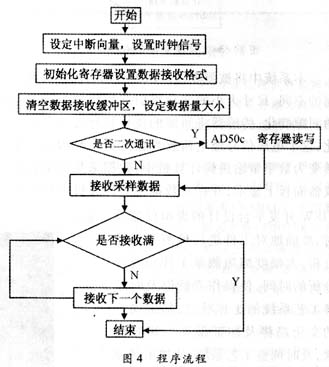
模拟音频芯片在数据采集过程二次通讯中的应用

H6芯片在应用方案设计中的原理图和PCB设计要点和注意事项详细说明






 工商网监
工商网监
评论